реключений и вторым входом блока 10 за держки, а выход - с третьим входом регулятора 6 напряжения, четвертый вход которого соединен с вторым выходом блока 9 переключений и первым входом блока 10 задержки, а второй вход соединен с выходом пропорционально-интегрального усилителя 11, к которому также подключены первый вход блока 12 задания ускорения и рывка и первый вход релейного усилителя 13, выход которого соединен с первым входом пропорционально-интегрального усилителя 11 и вторым входом блока 12 задания ускорения и рывка, выход которою соединен с вторым входом релейного усилителя 13, третий вход которого соединен с третьим входом блока 12 задания ускорения и рывка, вторым входом блока 14 выделения ошибки и выходом задатчика 15. Выход блока 14 выделения ошибки подключен к четвертому входу релейного усилителя 13, а первый выход - к датчику 16 скорости который механически связан с якорем электро- двигателя 1. Выход датчика 2 тока подключен к первому входу блока 9 переключений, второй вход которого соединен с выходом командного блока 17 Устройство включает также подъемную машину 18 и блок 19 растормаживания, соединенный с выходом датчика 2 тока. Регулятор 6 напряжения включает в себя операционный усилитель 20, инвертирующий вход которого соединен через резистор 21 с первым входом регулятора 6 напряжения, через резистор 22 с вторым его входом, через резистор 23 с третьим его входом, через резистор 24 с четвертым его входом и через резистор 25 и конденсатор 26 со своим выходом и выходом регулятора 6 напряжения.
Пропорционально-интегральный усилитель 11 включает в себя операционный усилитель 27, инвертирующий вход которого подключен к резистору 28, к цепи 29 коррекции, состоящей из параллельно включенных резистора 30 и резистора 31 с конденсатором 32, и соединен через резистор 33 и конденсатор 34 со свим выходом, который является выходом пропорционально-интегрального усилителя 11, первый вход которого подключен к резистору 28, а второй вход - к цепи 29 коррекции.
Релейный усилитель 13 включает в себя операционный усилитель 35. инвертирующий вход которого соединен с вторым входом релейного усилителя 13,через резистор 36 - с третьим входом этого усилителя и через резистор 37 - с четвертым его входом, а неинвертирующий вход операционного усилителя 35 подключен через резистор 38 к первому входу релейною усилителя К5,
выход которого соединен г. выходом операционного усилителя 35.
Блок 14 выделения ошибки состоит из операционного усилителя 39, в обратной
связи которого включен резистор 40. к инвертирующему входу подключен резистор 41, а к неинвертирующему - резистор 42 и резистор 43. причем резистор 43 соединен с общей точкой источника питания (не пока0 зан), имеющего нулевой потенциал, а резистор 42 - с первым входом блока 14 выделения ошибки, второй вход которого соединен с резистором 41 а выход - с выходом операционного усилителя 39.
5Блок 8 компенсации нагрузки состоит
из операционного усилителя 44. в обратной связи которого параллельно включены резистор 45 и конденсатор 46. а к инвертирующему входу подключены последовательно
0 конденсатор 47 и резистор 48. а также операционный усилитель 49. в обратной связи которого включен резистор 50. а к инвертирующему входу подкпючены резистор 51 и резистор 52, который соединен с выходом
5 операционного усилителя 44. Первый вход блока 8 компенсации нагрузки соединен с резистором 48, второй его вход соединен с резистором 51, а выход - с выходом операционного усилителя 49 Блок 9 переключе0 ния включает в себя ключ 53 элемент НЕ 54 и ключ 55 Первый вход блока 9 переключений соединен с коммутирующими входами ключей 53. 55. второй вход - с управляющим входом ключей 53 и через элемент НЕ 54 с
5 управляющим входом ключа 55 первый выход - с выходом ключа 53, а второй выход - с выходом ключа 55 Блок 12 задания ускорения и рывка (фиг 3) включает в себя последовательно соединенные компаратор
0 56, интегратор 57 с первым ограничителем 58 в цепи обратной связи и блок 59 выделения модуля, первый выход которого соединен с первым входом компаратора 56. второй выход подключен к первому входу
5 второго ограничителя 60, а т етий выход - к второму входу второго ограничителя 60, третий вход которого соединен с вторым входом блока 12 задания ускорения и рывка, а выход - является выходом блока 12, первый
0 вход которого соединен с вторым входом компаратора 56, а третий вход соединен с третьим входом компаратора 56.
Задатчик 15 может быть выполнен на ячейке сельсинного командоаппарата.
5 Датчик 16 скорости включает в себя тахо- генератор постоянного тока с делителем на- пряжения и ячейку гальванического разделения РГ-ЗАИ, причем тахогенератор механически связан с якорем 1 электродвигателя.
Блок 19 растормаживания может быть реализован с использованием типовой схемы автоматики на двух реле, одно из кото- рых включается по сигналу с датчика 2 тока и включает другое реле, которое устанавливается на самоблокировку с одновременной подачей сигнала на систему управления тормозом. Установка реле в исходное состояние происходит при затормаживании машины. Блок 10 задержки может быть выполнен в виде двух цепей стабилитронов, при этом величина напряжения пробоя стабилитронов определяет величину напряжения, при котором сигнал со входа блока поступает на его выход.
Электропривод работает следующим образом.
В исходном состоянии подъемная машина 18 заторможена, при этом на выходе командного блока 17 имеется сигнал логического О, а это обеспечивает включенное состояние ключа 55, при этом выход датчи ка 2 тока подключается к четвертому входу регулятора 6 напряжения и через блок 10 задержки к второму входу пропорционально-интегрального усилителя 11, при этом образуется контур регулирования тока якоря, а это обеспечивает при нулевом сигнале на выходе задатчика 15 нулевое значение тока в якорной цепи Кроме того, на первый вход регулятора 6 напряжения поступает сигнал Uy (с выхода датчика 7 напряжения) жесткой отрицательной обратной связи по напряжению генератора 3, что обеспечива ет гашение остаточного напряжения генератора 3. Кроме того, на третий вход регулятора 6 напряжения с выхода блока 8 компенсации нагрузки поступает только сигнал 1)44 гибкой отрицательной обратной связи по напряжению, т.к. на втором входе блока 8 компенсации нагрузки отсутствует сигнал положительной обратной связи по току якоря. Таким образом, в режиме нулевого задания при заторможенном двигателе обеспечивается за счет действия отрицательных обратных связей полное гашение остаточного напряжения генератора и нулевое значение тока в якорной цепи, а это уменьшает затраты электрической энергии на общий цикл подьема, что увеличивает производительность подьемной установки в целом.
При подаче задатчиком 15 сигнала управления на выходе компаратора 56 также появляется сигнал и интегратор 57 начинает интегрировать до напряжения ограничения первого ограничителя 58. Это линейно нарастающее напряжение преобразуется блоком 59 выделения модуля в сигнал определенной полярности и подается в качестве опорного на второй ограничитель 60 включенный в обратной связи релейного усилителя 13, при этом его выходное напря- жение будет также нарастать по линейному
закону, а это обеспечит нарастание тока якоря с интенсивностью, не превышающей скорость изменения выходного напряжения релейного усилителя 13, т.е. ток якоря будет нарастать с заданной интенсивностью, что
0 позволяет снизить динамические нагрузки п этом режиме до заданных значений за счет устранения возможности возникновения удара в зацеплении между двигателем и ба- рабаном. На втором входе блока 8 компен
5 сации нагрузки имеется си(ня/1 пропорциональный полному току якоря
U2-K2-U.
где Кг - коэффициент передачи датчика 2 тока;
01Я - ток в якорной цепи
При этом на выходе операционно о уси лителя 49 будет присутствовать сигнал про порционапьный статической составляющей тока якоря, т.е. к моменту нагрузки электро5 привода. Соответствующим выбором резистора 50, т.е. изменением коэффициента усиления операционного усилителя 49, мож но достичь полной компенсации нагрузки В этом случае увеличение напряжения генера
0 тора будет точно соответствовать падению напряжения в якорной цепи вызванному увеличением тока якоря, т е будет обоспе чена в установившемся режиме независи мость скорости движения от нагрузи
5 электропривода что приводи к повыше нию точности управления электромрипо
ДОМ.
В случае уменьшения нагрузки выходное напряжение блока 8 компенсации на
0 грузки будет также уменьшаться, что приведет к соответствующему уменьшению выходного напряжения регулятора 6 напряжения, а следовательно и напряжения на выходе генератора 3, при этом скорость
5 электропривода плавно восстанавливается на прежнем уровне При резком изменении нагрузки, что имеет место при разгрузке сосуда, в первый момент времени блок 8 компенсации нагрузки вызывает уменьше0 ние напряжения на выходе регулятора б напряжения и на выходе генератора 3. что приведет первоначально к уменьшению скорости движения сосуда с последующим наложением тормоза. Увеличение скорости
5 по отношению к первоначальному уровню в этом режиме не наблюдается, что однако имело место в прототипе, поэтому предла- таемое устройство позволяет снизить динамические нагрузки в кинематических передачах
Постоянная времени обратной связи пропорционально-интегрального усилителя 11 выбирается равной электромеханической постоянен времени (Тм) электропривода, т.е.
Tl R33 G34 TM,
где Взз сопротивление резистора 33, Ом;
Сз4 - емкость конденсатора 34, Ф.
При этом обеспечивается компенсация влияния электромеханической инерционности только по управляющему воздействию, что позволяет исключить удары в кинематических звеньях и предотвратить возникновение упругих колебаний сосуда в моменты изменения направления подъемной установки. Ограничение тока в якорной цепи осуществляется токоограничителем, выполненным в виде задержанной отрицательной обратной связи по току якоря. Токоограни- чение работает следующим образом. С ростом тока якоря увеличивается напряжение на выходе датчика 2 тока, если оно достигает величины напряжения уставки блока 10 задержки, то на его выходе появляется сигнал, пропорциональный току якоря, который поступает на второй вход пропорционально-интегрального усилителя 11, т.е. включается в работу дополнительный контур тока, что позволяет поддерживать ток в якорной цепи на уровне, определяемом уставкой включения блока 10 задержки. Одно- временно с включением в работу токоограничителя, т.е. при достижении током требуемого уровня, соответствующего номинальной концевой нагрузке, включается блок 19 растормаживания, разрешая рас- тормаживание подъемной машины 18. Задание начального тока якоря при заторможенной подъемной машине 18 является необходимым условием для плавного трога- ния сосуда в заданном направлении. Поэтому растормаживание осуществляется только после того, как создан начальный момент на двигателе, что позволяет исключить обратный ход сосуда, снижающий производительность. Цепь 29 коррекции позволяет осуществлять включение и отключение токоограничения оптимально, т.е. с минимальным значением перерегулирования и с максимальным быстродействием. При растормаживании подъемной машины 18 на выходе командного блока 17 появляется сигнал логической 1, при этом отключается ключ 55 и включается ключ 53, что обеспечивает подключение выхода датчика 2 тока к второму входу блока 8 компенсации нагрузки и второму входу блока 10 задержки, который имеет более высокую уставку срабатывания, соответствующую макси мально допустимому току якоря 1 электродвигателя Начинается движение
электропривода.
При этом уровень максимальной скорости электродвигателя будет соответствовать величине сигнала на выходе задатчика 15, а совместная работа релейного усилителя 13, блока 12 задания ускорения и рывка и пропорционально-интегрального усилителя 11 обеспечивает формирование тахог- раммы движения сосудов по оптимальному закону, т.е. на втором входе регулятора 6
напряжения формируется сигнал, состоящий из участков парабол (при необходимости в ограничении рывка, что имеет место при изменении ускорения движения) и линейных участков ограничения ускорения на
требуемом уровне, определяемом технологическими условиями
Если напряжение, соответствующее действительной скорости движения сосудов (выделяется на выходе датчика 15 скорости)
будет отличаться от напряжения задания, то на выходе блока 14 выделения ошибки появляется напряжение, пропорциональное ошибке регулирования от внутренних возмущений, т.е. ст изменения параметров
якорной цепи, например, при перепадах температуры. Сигнал ошибки поступает на четвертый вход релейного усилителя 13, при этом изменяется его выходное напряжение, что в конечном итоге приведет к изменению
скорости и будет устранена ошибка между действительной и заданной скоростями.
Таким образом, предлагаемое устройство позволяет обеспечить за счет формирования тахограммы, состоящей из участков
прямых и парабол (являющейся оптимальной для шахтных подъемных установок), и точного ее отслеживания за счет исключения ошибки регулирования, необходимую точность движения сосудов, о уменьшает
длительность цикла подьема и повышает производительность электропривода.
При работе электропривода на первом входе блока 8 компенсаций нагрузки имеется сигнал, пропорциональный напряжению
якорной цепи, а на втором его входе - сигнал, пропорциональный току в якорной цепи, при этом на его выходе будет сигнал пропорциональный нагрузке электропривода, что обеспечивается соответствующим
выбором параметров блока 8 компенсации нагрузки




| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1986 |
|
SU1324976A1 |
| Электропривод подъемной машины | 1981 |
|
SU996317A2 |
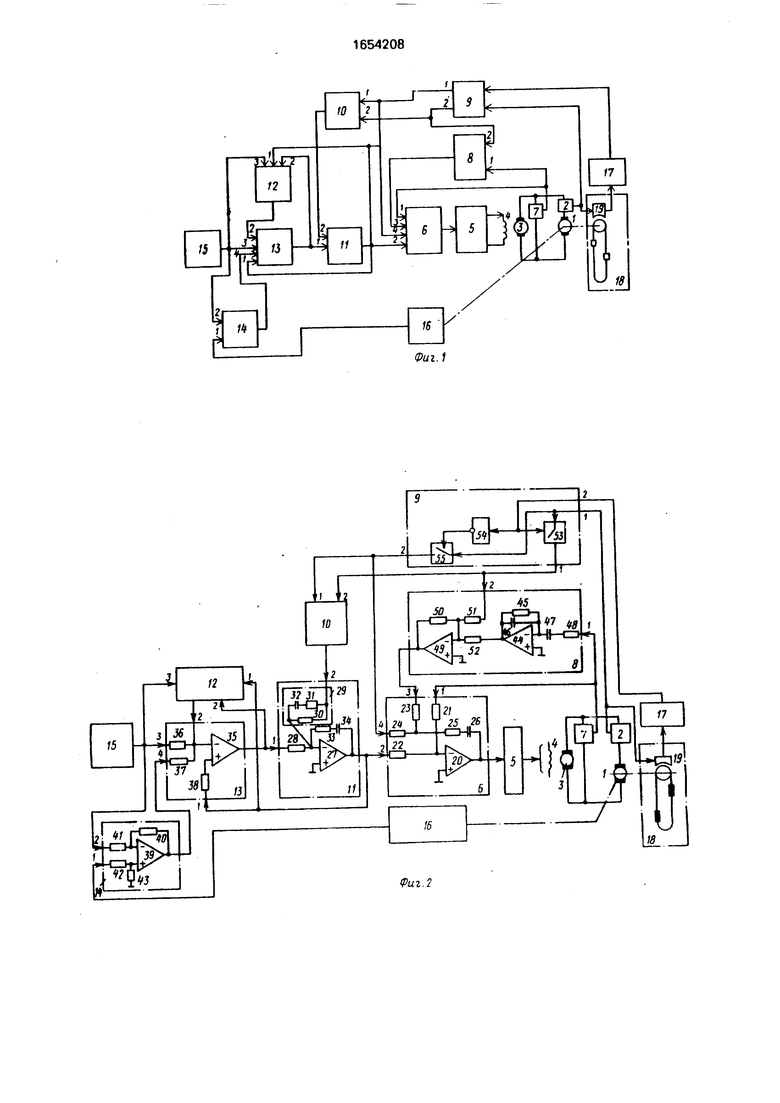

Изобретение относится к шахтным подъемным установкам и позволяет повысить точность управления электроприводом постоянного тока и снизить динамические нагрузки. Электродвигатель 1 соединен через датчик 2 тока с генератором (Г) 3. Управление ГЗ осуществляется от тиристорного преобразователя 5. Параллельно ГЗ включен датчик 7 напряжения, выход которого и выход блока 19 растормаживания через командный блок 17 подключены ко входам блока 9 переключения. Выход последнего Изобретение относится к подъемным установкам, в частности к электроприводам постоянного тока для шахтных подъемных установок. Целью изобретения является повышение точности управления электроприводом и снижение динамических нагрузок. На фиг. представлена функциональная схема электропривода; на фиг. 2 - принципиальная схема электропривода; на фиг. 3 - схема блока задания ускорения и рывка. подключен к блоку 10 задержки, выход которого подключен ко входу пропорционально- интегрального усилителя 11, к которому подключены блок 14 выделения ошибки, соединенный с датчиком 16скорости и блок 12 задания ускорения и рывка Задатчик 15 соединенный с релейным усилителем 13 с блоком 12 в обратной связи, и усилихель 11 обеспечивают формирование оптимального управляющего воздействия на входе регулятора 6 напряжения. Дополнительно с участием блока 14 и датчика 16 обеспечивается коррекция управляющего воздействия при изменении параметров привода. Выход датчика 2 тока якоря электродвигателя 1 подключается к первому или второму входам блока 10 задержки с помощью блока 9 переключения в зависимости от логического сигнала на выходе блока 17. Это обеспечивает два уровня токоограничения электропривода. Блок 8 компенсации нагрузки, на входе которого имеются сигналы с выхода датчика 7 напряжения и датчика 2 тока, подключаемого через блок 9. позволяет устранить ошибки управления, вызванные внешними возмущающими воздействиями со стороны нагрузки.3 ил. Якорь 1 электродвигателя соединен через датчик 2 тока с якорем генератора 3, обмотка 4 возбуждения которого подключена к выходу тиристорного преобразователя 5, вход которого соединен с выходом регулятора 6 напряжения, первый вход которого соединен с выходом датчика 7 напряжения, вход которого соединен с якорем генератора 3, а выход - с первым входом блока 8 компенсации нагрузки, второй вход которого соединен с первым выходом блока 9 песл С о ел ю о 00
U44- U
( R45 С47) Р
( R45 С47 ) ( R48 С46) Р +( R48 С47 + R45 ) Р + 1
( R45 С47) Р
где )з - выходное напряжение атчика 7 напряжения:
Кз выходное напряжение генератора ;
IJ44 - выходное напряжение операционного усилителя 44:
Р - символ дифференцирования.
При выборе параметров из условий
R45 C47(R48 C47+ R45 C46)TM
R48 C46 T« - электромагнитная посто- янная якорной цепи,
выходное напряжение операционного усилителя 44 будет пропорционально динамической составляющей тока якорной цепи
L) Т Р
Тм Тя Р2 + Т„ Р -М что имеет место при торможении или в процессе маневрирования при посадке на кулаки. В прототипе для демпфирования колебаний в этих режимах приходится снижать быстродействие контура регулирования ЭДС. что снижало точность регулирования по управляющему воздействию.
Таким образом, по сравнению с-прототипом в предлагаемом электроприводе обеспечивается повышение точности управления подъемной установки за счет увеличе- ния быстродействия при отработке управляющего сигнала и за счет полной компенсации возмущающего воздействия на электропривод со стороны нагрузки, при этом исключается возможность возникновения ударов и упругих колебаний, что снижает динамические нагрузки.
Формула изобретения
Электропривод постоянного тока шахтной подъемной установки, содержащий регулятор напряжения, выход которого через тиристорный преобразователь подключен к обмотке возбуждения генератора, выход которого через датчик тока подключен к двигателю шахтной подъемной установки, к валу которого подсоединен датчик скорости, выход которого подключен к первому входу блока выделения ошибки, ко второму входу которого подключен задатчик, а параллельно генератору подключен датчик напряжения, выход которого подключен к первому входу регулятора напряжения, а выход датчика тока подключен к первому входу блока переключения и ко входу блока растормаживания, выход которого через командный блок подключен ко второму входу блока переключения, и блок задержек, о т - личающийся тем, что, с целью повышения точности управления и снижения динамических нагрузок, он снабжен
пропорционально-интегральным усилителем, блоком компенсации нагрузки, блоком задания ускорения и рывка и релейным усилителем, при этом выход релейного усилителя подключен к первому входу пропорционально-интегрального усилителя, выход которого подключен к первым входам релейного усилителя и блока задания ускорения и рывка, выход которого подключен ко второму входу релейного усилителя, выход которого подключен ко второму входу блока задания ускорения и рывка, а выход задатчика подключен к третьим входам блока задания ускорения и рывка и релейного усилителя, выход блока выделения ошибки
подключен к четвертому входу релейного усилителя, причем выход пропорционально- интегрального усилителя подключен также ко второму входу регулятора напряжения, а выход датчика напряжения подключен к
первому входу блока компенсации нагрузки, выход которого подключен к третьему входу регулятора напряжения, а первый выход блока переключений подключен к четвертому входу регулятора напряжения и к
первому входу блока задержек, выход которого подключен ко второму входу пропорционально-интегрального усилителя, а второй выход блока переключений подключен ко вторым входам блока задержек и блока компенсации нагрузки.
Фиг. 2
Выход
Фиг.З
| Устройство для ультразвукового шлифования и полирования | 1957 |
|
SU114551A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
