41
сл
00
1
Изобретение относится к электрическим машинам, а именно к методам измерения их характеристик, и может быть использовано для неразрушающего контроля момента трогания (статического момента трения) электрических двигателей с закрытым корпусом.
Момент трогания является одним из основных параметров двигателей. Он зависит от точности изготовления деталей и узлов , качества сборки, количества закладьшаемой в опоры смазки, величины натяга в опорах ротора, условий испытаний и т.п. и слуясит критерием качества двигателе Контроль момента трогания является наиболее актуальным в двигателях с малым запасом по моменту.
Известен способ измерения момента трогания при горизонтальном положении оси подшипника, заключающийся в том, что контролируемый подшипник устанавливают на цапфы нала-балансира, момент создают с помощью грузов прикладываемых к концам нити, перекинутой через цал, и перестают увеличивать, когда вал начнет поворачиваться, оценку момента трогания производят по разности весов грузов l ..
Наиболее близок к предлагаемому способ измерения момента трогания двигателя с закрытым корпусом путем замера напряжения трогания С2. ,
Согласно известному способу мЬмент трогания находят расчетным путем по заранее известному пусковому моменту и номинальному напряжению.
Однако известный способ не обеспечивает достаточной точности опр;еделения момента трогания.
Действительно, напряжение трогания не характеризует однозначно качества двигателя. Предположим, что два двигателя имеют равные моменты трогания, а зависимости моментов двигателей от напряжений на обмотках у них разные вследствие разброса конструктивных параметров. Тогда двигатель, имеющий больший момент, при равных значениях напряжений на его обмотках будет иметь меньщее напряжение трогания и наоборот. Таким образом, одному и тому же значению момента трогания двух двигателей соответствуют разные значения напряжений трогания, вследствие
453131
чего необходимо делать перевод напряжения трогания в момент трогания, что снижает точность его определения. Кроме того, погрешности в определении момента трогания по известному способу связаны с тем, что определение момента трогания происходит не при нулевой, а при конечной частоте вращения. Момент
О трогания существенно зависит от частоты вращения, поэтому определение его на частоте, отличной от нулевой, снижает точность измерения.
Цель изобретения - повьшгёние точности измерения. Поставленная цель достигается
тем, что согласно способу измерения момента трогания двигателя с закрытый корпусом путем замера напряжения трогания разгоняют двигатель при подключении его к номинальному многофазному напряжению сети, отключают от сети и измеряют на выбеге зависимость момента двигателя от частоты вращения, повторно разгоняют двигатель в том же направлении, далее переключают его на напряжение, равное напряжению трогания, но имеющее обратный порядок следования
30 фаз, и при втором выбеге двигателя . также измеряют зависимость момента двигателя от частоты вращения, определяют разницу .моментов при одной и той же частоте вращения, близкой J к нулевой, для случаев второго и
первого выбегов и путем экстраполяции полученной зависимости при нулевой частоте вращения находят момент трогания двигателя.
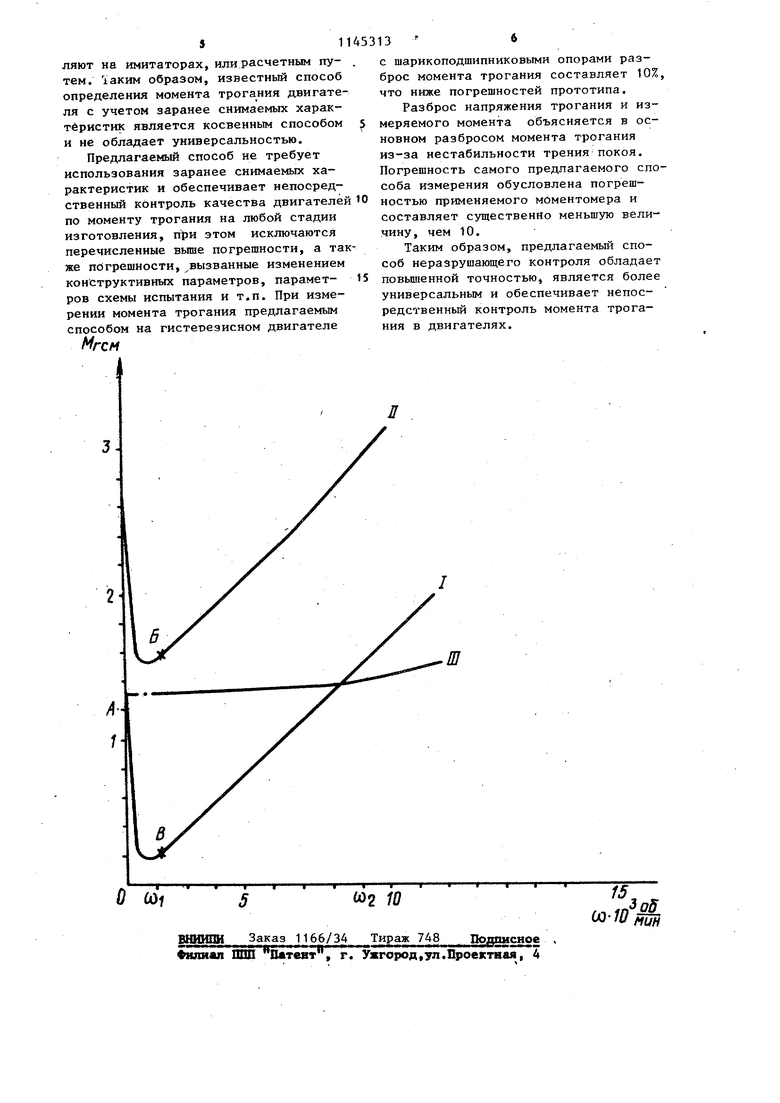
На чертеже показаны следующие зависимости: I - зависимость момента двигателя от частоты вращения при выбеге двигателя, отключенного от
j сети;,II - то же, но при подключении двигателя на напряжение трогания с обратным порядком следования фаз; III - разностная зависимость моментов при втором и первом выбегах.
Зависимости I и И в диапазоне O-w, прилегают близко к оси моментов, т.-е. практически лежат на этой оси (на рисунке эта зона дана в увеличенном масштабе). В этом диапазоне до-- статочно зксперш ентально проверить положение точки А, что и делается в двигателе с открытым корпусом путем подвешивания грузов к одному из
3Л1
концов нити, перекинутому через ротор.
Зависимость III в диапазоне скоUJ,
ростей О - --- параллельна оси .1u)c
рости, где
нал скорость.
С достаточной для практики точностью определение момента можно проводить по отрезку БВ, не строя зависимость III.
По предлагаемому способу измерение производится следующим образом (рассматривается на примере двигателя с двумя статорными обмотками).
Двигатель устанавливается на рамке измерителя момента, подвешенной на упругих шарнирах, осью вращения, направленной по оси подвеса рамки. Подается номинальноенапряжение на первую статорную обмотку, и двигатель разгоняется до некоторой скорости to, после чего напряжение питания отключается. В процессе выбег в нескольких точках снимается одновременно информация о скорости вращения, potopa с второй статорной обмотки и о моменте сопротивления, прикладываемом тормозящимся ротором через корпус к измерителю моментов. Строится зависимость 1. Затем напряжение на первой статорной обмотке медленно увеличивается, и в момент трогания ротора (определяемый, например, по осциллографу или измерителю моментов) измеряется величина этого напряжения. Снова подается номинальное напряжение на первую стторную обмотку, и двигатель разгоняется до той же скорости (л) в. том же направлении, что и при снятии зависимости 1. После снятия номинального напряжения к этой же обмотке прикладывается напряжение, которое определено в момент трогания ротора но с изменением порядка следования фаз для обеспечения торможения. Снимается на выбеге описанным вьше способом зависимость суммарного томозящего момента от скорости. Строится зависимость II,
Определяют зависимость III, представляющую собой разность, между зависимостями II и I, Зависимость III экстраполируется до пересечения с осью ординат. Отрезок ОА на чертеже соответствует моменту трогания двигателя,
13 .
Зависимости, II и III описываются соответственно уравнениями
м м„+ м,,+ м , (О
М. М Н -ь MI , (2) , Mr, - Mj (Mj- Mg) )
где M , - суммарный момент сопротивления ротора двигателя при выбеге;
Mjj - суммарньй тормозящий момент ротора двигателя на выбеге при приложении к статору напряжения, соответствующего моменту трогания;
М - момент трогания двигателя; М - момент трения, создаваемый
механическими элементами контактирования ротора и статора (например, в подшипниках) ;
Mj, - момент сопротивления двигателя от аэродинамических J потерь;
Mj , - моменты сопротивления двига ателя от вихревых токов.
В уравнениях (1) и (2) моменты
сопротивления М и М„ при одинаковой угловой скорости равны между собой, поскольку обусловлены одними и теми же физическими причинами. Моменты от .вихревых токов могут в
общем случае быть разными, однако они обращаются в нуль при ш О, тогда
Мй и; , (4) В случае, если зависимость III подходит к оси моментов с мапь1м наклоном, то момент трогания можно приближенно определить отрезком БВ, не строя зависимость III и не прибегая к экстраполяции,
В синхронных двигателях с одной статорной обмоткой и в других типах двигателей информация о скорости ротора на выбеге снимается с помощью специальных измерительных схем.
На чертеже зависимости I, II и III построены по результатам экспериментальной проверки предлагаемого способа на синхронном двигателе,
В ряде конструкций закрытых двигателей невозможно измерить характеристики в собранном двигателе, необходимые для измерения момента трогания по способу-прототипу. Их опреде
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля неравномерности воздушного зазора асинхронного двигателя | 1984 |
|
SU1203444A1 |
| Способ контроля состояния электродвигателей дробилок кормов | 1990 |
|
SU1755038A1 |
| Устройство для измерения времениВыбЕгА элЕКТРичЕСКОй МАшиНы | 1979 |
|
SU843113A1 |
| Способ пуска малоинерционного асинхронного электродвигателя | 1983 |
|
SU1108589A1 |
| СПОСОБ РЕКУПЕРАЦИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ И ТРАНСПОРТНОЕ СРЕДСТВО С РЕКУПЕРАТОРОМ (ВАРИАНТЫ) | 2001 |
|
RU2184660C1 |
| Способ контроля неравномерности воздушного зазора асинхронного двигателя | 1983 |
|
SU1176275A1 |
| ДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ И ПРЯМЫМ ПУСКОМ ОТ СЕТИ И СПОСОБ ЕГО ВКЛЮЧЕНИЯ | 2016 |
|
RU2739874C2 |
| Способ управления электродвигателем двойного питания | 1982 |
|
SU1073870A1 |
| Способ определения частотной характеристики проводимости асинхронной машины | 1990 |
|
SU1780062A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ТРОГАНИЯ ДВИГАТЕЛЯ С ЗАКРЫТЫМ КОРПУСОМ путем замера напряжения трогания, отличающийся тем, что, с целью повьш1ения точности измерения, разгоняют двигатель при подключении его к номинальному многофазному напряжению сети, отключают от сети и измеряют на выбеге зависимость момента двигателя от частоты вращения, повторно разгоняют двигатель в том же направлении, далее переключают его на напряжение, равное напряжению трогания, но имеющее обратный порядок следования фаз, и при втором выбеге двигателя также измеряют зависимость момента двигателя от частоты вращения, определяют разницу моментов при одной и той же частоте вращения, близкой к нулевой, для случаев второго и первого выбегов и путем экстраполяции полученной зависимости при нулевой частоте вращения находят (Л момент трогания двигателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Спришевский.В.И | |||
| Подшипники качения | |||
| М., Машиностроение, 1969 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Хрущев В.В | |||
| Электрические микромашины автоматических устройств | |||
| Л., Энергия., 1976, с | |||
| Держатель для поленьев при винтовом колуне | 1920 |
|
SU305A1 |
