I
Изобретение относится к подъемнотранспортным устройствам и может быть использсжано дпя защиты шахтных подъемников от напуска каната, перегрузки, нарушения нормального режима работы направляющего органа каната, например .заклинивания или же износа его подшипнйксю.
Известно устройство защиты шахтных подъемных установок от заклинивания подъемного сосуда, содержащее датчик концевых нагрузок на канате, установленный под подшипниками копровых фкивов, блоки задания предельных нагрузок на канате, выходы которых через один из переключателей соединены с первым входом первого блока сравнения, блок выдачи сигнала аварии и останова, вход которого подключен к выходу первого блока сравнения, блок памяти, сук матор, блок выдачи трафаретных концевых нагрузок на канате и блок синхротгазации, причем вход блока выдачи трафаретных концевых нагрузок на канате соединен с выходом
блока синхронизации, а выход - с первым входом сумматора, вход блока памяти и первый вход второго блока сравнения через другой переключатель подключены к выходу датчика концевых нагрузок на канате, выход блока памяти соединен со вторым входом сумматора, второй вход второго блока сравнения подключен к выходу сумматора, а выход - ко второму входу первого блока сравнения flj.
Однако известное устройство не обладает достаточной надежностью защиты подъемных установок.
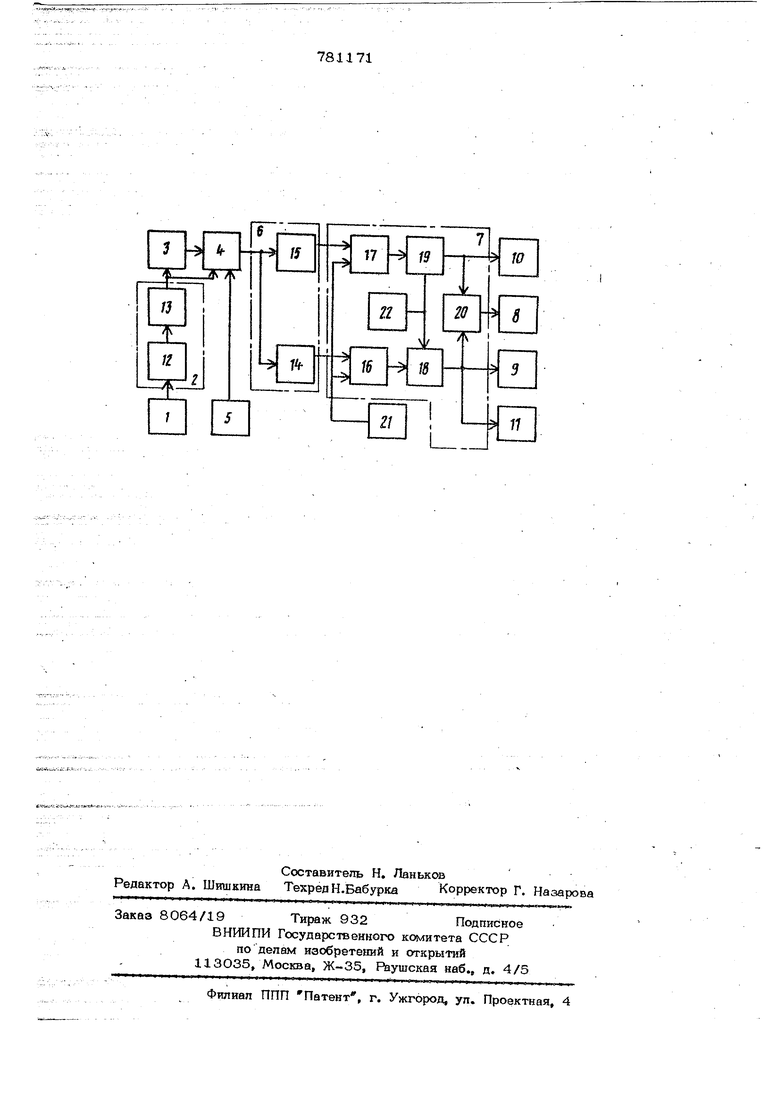
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство защиты шахтного подъемника, содержащее силоизмерительный датчик, смонтированный под подшипником направляющего органа каната, задатчик массы опускаемой длины каната, выход которого соединен с блоком компенсации, последовательно соединенные блок разделения сигналов по амплитуде и блок управления, к выходу кото3 .. 78 рого- подключены аварийные сигнальные блоки и испошмтепьные органы упровлйниЯ предохранительным тормозом подъемника и лсюителем каната f2. .Недостатком указанкого устройства является сравнительно невысокая надежность защиты шахтного подъемника от напуска каната, перегрузки из-за влияния Механических пульсаций нагрузки на канате и отсутствие защиты от нарушешя нормального режима работы направлггющего органа каната, что безопасность шахтного подъемника в ©ксплуатвдни. --- .;.Цедь изобретения повышение нрсти защиты и безопасности работьг подъемника. Указанная цель достигается тем, что силонзмерительньгй датчик выполнен в виде преобразователя акустшгеекого сиг нала, вырабатываемого пoдшипннкo л на. правлягошего органа каната в эяектричес™ 1ШЙ сигнал, причем устройство снабжено блоком выделения ударных нагрузок, уэ лом контроля наличия вращения привода йбдъёМГЖй, соедкненньпч с блоком ynptuiлшия, и блоко1м выделения весового пара м-етра сигнала преобразователя, подключе ным вxoдo f к выходу преобразозатепя акустического сипшла в электричеС1шй сг1гна1т, а выходом - ко входам блока к(/гпенсаЩ1И и блока выделетгая ударных нагрузок, соединенного выходом с блоком ксыпенсадий Кроме того тем, что блок выделетгая ударных нагрузок выполнен на трансформа торе« И, наконец, тем, что блок управления содержит триггеры, узел сброса, логачес кий элемент ИЛИ и логические элементы И, одни из входов которых соединены с выходом узла контроля наличия вращаш-тя привода подъемника, аругие - с выходом блока разделения сигналов по амплит де, а выходы - с одними из входов соответствующих тряперов, выход одного из которых соединен с одним из аварийных сигнальных блоков и из входов эп ментов ИЛИ, а второго с другим вхо дом элемента ИЛИ, соединенного выходсы с исполшттельным органом управлеш предохранитйтьным тормозом подъемника и с друпш аварийньм сигназтьньв бпоком и с исполнительным органок управле а1Ш ловителем каната, np№iSM другие вко ды триггеров соединены с узлом сброса. На чертеже показана функциональная схема устройства. Устройство защитьг содержит сипйиз ерительный датгнк 1, смонтированный од подшипником направляющего органа аната, блок 2 выделения весового параетра сигнала блок 3 выделения, ударных агрузокJ блок 4 компенсашшв вадатчик массы огг/скаемой дпкиы ка -шта; бпок разделe ra:я сигналов по амп,татуш бпок 7 управления, исполЕктельный орган 8 управпешш предохранительным тормо 3C&f подъеь га1 ка, аварийные сигнальные блоки 9 и 10 и исполюгтепъный орган 11 упрбшпешш ловитепем каната. Силоиемеритепьный датчик 1 выпогенен в виде преобразоватепя акустяческого сигнала., вырабатьгоае.ого подтпипником в эпектрнчаский сигнал, HanpHivfep шьезо электрического преобрааоватепя ускорений колебаний подшипника и соединен с блоком 2 выделения весового йараметра сигнала преобразователя. . Блок 2 выделения весового параметра сигнала преобразователя выполнен на последовательно соединенных полосовом фильтре 12 и детекторе 13 частоты сигнала, генерируемого соударением деталей подшипника и акустыческта каналом свя аи подшипника с силоизмерительным дат 4iffic vi 1, перед фильтром 12 эт-ого блока может быть включён усилитель-, Бпок 3 выделения ударных нагрузок выпогиен в виде трансформатора, первичная обмотка которого подключена к выходу детектора 13 блока 2 выделения весо-, вого параметра сигнала преобразователя, а вторичная обмотка соединена со. входол блока 4 компенсаш-ш:, друпши входами блок 4 компенсапаи соединен с выходами детектора 4 и с выходом детектора 13 и еадатчйка 5 массы оп скаемой в ствол длины каната. Выход блока 4 компенсации соединен с блоком 6 разделения сигналов по амплитуде, выполненнсы в виде первого амплитудного дискриминатора 14 с оИнверсныгС : . выходом и второго амплитудного дискриминатора 15 с выходом, с общим для них входом, причем порог пропускаемого сигнала первого дискриминатора 14 Н71же порога второго днскр1минатора 15, Выходы каждого из дискриминаторов 14 и 15 соединешл с блоком 7 управпешгя Блок 7 управлет я на входе выполнен с первым и вторым лсп1ческ1а1И элемен тами И 16 и 17, соединенными соответ ственно с выходами амплитудных д юкриминаторс 14 и 15, Выходы логических элементов И 16 и 17 соединены соотве-рствеино с первым к вторым триггерами 18 и 19, выходы которых подключе1гы на входы логйчес,|сого элек енЬа ИЛИ 50, соедине1таого выходом с исполнитегаыадм органом 8 управпеггая предохранительным тормозом подъемника. Выход триггера |18 соединен с аварийным сигнальным блоком ,9 и с испопш тепьньп- органом управления ловителем каната. Аварийный сигнальный блок 9 предназначен для .аварийной сигнализации о напуске каната или же заклинивании направляющего органа каната. Выход триггера 19 соединш с аварийным скгнальньп г блокам 10, который предназначен для аварийной сигнализа1ши о перегрузке подъемника или же сверхдопустимомизносе подшипников направляющего органа каната. К входам элементов И 16 и
17подключен узел 21 контроля наличия вращения привода подъемника. Установочные входы исходного состояния триггере®
18и 19,соединены с узлом сброса 22. Принш п работы устройства основан
на TOMj, что величина акустического сиг нала, вырабатываемого подшипником направляющего органа каната мало зависит от скорости вращения вала, но существенно меняется в зависимости от нагрузки. Чем больше нагрузка на вал, тем сильнее удары в его подшипниках.
Сила соударения деталей подшипника меняется и от степени износа самого подшипника (величины зазоров).
В материале подшипника распростра- ,няются также сигналы, возбуждаемые соударением набегающего каната и шк1та несбалансированностью массы шкива.
В то ке время колебательное ускорение микроперемещения частиц материала подшипника, вызьюаемое соударением деталей подшипника, значительно больше ускорения из-за иеуравновешенностн направляющего органа каната и прочих возбуждающих факторов и прямо пропорционально нагрузке.
Сигналы от соударения деталей подшипника поступают в материал обоймы подшипника, которая Является акустическим каналом связя и характеризуется своей частотной характеристикой. Произведение спектра соударения деталей подшипника и частотной характеристики канала связи определяет спектр сигнала, регистрируемого датчиком.
Зкапке частоть{ сигнала, генерируемого соударением деталей подшипника и акустическим каналом связи, позволяет использовать частотную фильтрацию и
детектирование для выделет-шя веселого параметра сигнала, характеризуемого e tплитудой.
Весовой параметр сигнала нодверженг J влиянию механических пульсаций нагрузк, возникающих при переходных режимах работы подъемника, но значительно в меньшей степени из-за выполнения силоизкгерительного датчика в виде пьезоэлектри50 ческого преобразователя ускорения колебаний подшипника.
Это обуслсвлено тем, что выходной сигнал пьезоэлектрического преобразсвателя ускорения колебаний зависит не топь ко от нагрузки на вал, но и от наличия
{5 и скорости вращения вала.
Кроме того, частичная компенсация ударных нагрузок в весовом параметре сигнала позволяет полностью исключить юс влияние на эффективность и надежность
20 защиты шахтного подъемника.
Измерение скорректированного весового параметра сигнала при наличии вращения направляющего органа каната, что обусловлено принципом действия силоиз25мерительного датчика, и одновременный контроль наличия вращения привода подъемника, позволяют одним аппаратом осуществить зашит5 от напуска каната, перегрузки, заклинивания направляющего ор0гана каната и сверх допустимого износа : его подшипников.
В исходном состоянии при отсутствии вращения привода подъемника узел 21 контроля наличия вращения привода выда
5 е-тзапрещающее напряжение О на рабо- . ту логических элементов И 16 и 17. В это время на выходе силойзмерительного датчика 1 напряжение также отсутствует. .Поэтому на входе блока 6 разделения налов по амплитуде присутствует напряжение , не достигающее порогов пропускаемых сигналов амплитудных дискрттминатоpcffl 14 и 15, а с выхода амплитудного дискриминатора 14 с 1тверсным выходом
5 снш тается разрешающее напряжение I, которое приложено к первому входу логического элемента И 16, Однако отсутствие разрешайщего напряжения Т на втором входе логического элемента И 16,
0 не вызывает изменения выходного напряжения этого элементу в связи с чем триггер 18 находится в исходном состоя- НИИ. На выходе амплитудного дискриминатора 15 с прямым выходом напряжение
5 отсутствует. На входах логического элемента И 17 нет разрешающего напряжения, поэтому триггер 19 находится в нсходном состоянии, в исходном состоянии аходятся также аварийные сигнальные блоки 9 и 10, исполнительные органы 8 и 11 управления предохранительным тормозом подъемника и ловителем каната, - С началом вращения привода подъемника обеспечивается, начало движения системы канат - направляющий орган каната - сосуд. При этом с выхода силоизмерительного датчика 1 начинает поступать сигнал, который проходит через блок 2 выделения весового параметра сигнала преобразователя на вход блока 4 компенсации и через блок 3 выделения ударных нагрузок-также на вход блока 4 кокгаёнсации.Й результате весовой параме сигнала освобождается на заданную величину от амплитудных пульсаций, вызванных действием на сосуд инерционных и ударных сил; изменением массы опускаемой в ствол длины каната. Выходное напряжение блока 4 компенсации поступает на вход блока б разделения сигналов по амплитуде. При нормальной работе, с началом движения системы канат-шкив-сосуд, пос тупивший сигнал превышает порог сраба- tbraaHHH только амплитуднох-о дискриминатора 14 с инверсным выходом , Поэтому его выходное напряжение понижается до нуля, тем самым выдается запрещение на работу логического элемента И 16. После чего скорость привода подъем ника достигает определенной минимальной величины, сосуд выходит из зоны погрузочно-разгрузочной площадки и узел 21 контроля наличия вращения привода подъемника выдает разрешающее напряжение 1 на вторые входы логических элементе© И 16 и 17. , Однако, выходные напряжения логичес ких элементов И 16 и 17 изменится не могут из-ёа отсутствия разрешающего напряжения 1 на их первых входах. Остальная часть схемы при этом находит ся в исходном состоянии. Снижение скорости привода подъемника до остановки вызьшает при определенной минимальной скорости движения срабатывание узла 2 контроля наличия вращения привода подъе Мника, который выдает запрещающее напряжение О на.вторые входы логичес ких элементсе И и 17. Затем, После прекращения врашения направляющего органа каната, от амплитудного дискриминатора 14 с инверсным выходом поступает разрешающее напряже ние I на первый вход логического элемента И 16. Однако это не может изменить выходное его напряжёние, Taji как на втором входе уже отсутствует разрешающее напряжение 1. При зависании сосуда в период движения, а также при заклинивании направляющего органа каната и прекращении его вращения, снижаются выходные напряжения силоизмерительного датчика 1 и де-г ектора 13 блока 2 выделения весового параметра преобраздаателя. Блок 3 выделения ударных нагрузок в совместной своей работе с блоком 4 компенсации фиксирует предельный .параметр сигнала. При этом на выходе блока 4 компенсации напряжение. станет ниже заданного значения и порога возвращения амплитудного дискриминатора 14 в исходное состояние. На выходе амплитудного дискриминатора .14 появится напряжение, которое проходит через открытый при этом логический элемент И 16 и перебрасьтает триггер 18 в новое состояние. Сразу же выходное напряжение триггера 18 проходит через логаческий элемент ИЛИ 20 на вход исполнительного органа 8 управления предохранительным тормо.зом подъемника, а также поступает на вход исполнительного органа 11 управления ловитела г каната и включает аварийный сигнальный блок 9, Предохранительный тормоз подъемника и ловитель каната срабатывают одновременно, осуществляя аварийную остановку подъемника и предотвращая опасный напуск каната в ствол. Перевод предохранительного тормоза подъемника, ловителя каната и аварийного сигнального блока в исходное состояние станет возможным только после ликвидации причин аварии путем включения узла 22 сброса. При заклинивании сосуда в период движения, а также при сверх допустимом износе подшипников направляющего органа каната, возрастают выходные напряжения силоизмерительного датчики 1, блока 2 выделения весового параметра СИ1 .нала преобразователя, а также блока 4 компенсации. При этом срабатывает амплитудный дискриминатор 15, так как поступивший сигнал превышает порог пропускаемого им сигнала. Выходное напряжение амплитудного дискриминатора 15 проходит через открытый логический элемент И 17 на вход триггера 19 и переводит его в новое состояние. Выходное напряжение триггера 19 включает .аварийный сигнальный блок 10 и через (логический элемент ИЛИ 20 -т исполнительный орган 8 управпения предохранительным тормозом подъемника. Подъемни затормаживается предохранительным тор мозом. Перевод устройства в исходное состоя ние производится после ликвидации причин аварии с помощью узла 22 сброса. Задатчик массы опускаемой длины каната в устройстве защиты выполняется в виде сельсина, кинематически Связанно го с указателем глубины. Блок 4 компенсаиии выполнен в виде схемы алгебраического суммирования сигналов. Узел 21 контроля наличия вращения привода подъемника выполнен в виде тах генератора, кинематически связанного с исполнительным двигателем. Лбвитель каната смонтир жан.ниже направляющего органа каната на пути подъема сосуда. Формула изобретения 1. Устройство защиты шахтного подъемника, содержахпее силоизмерительный датчик, смонтированный над подшипником направляющего органа каната, задатчик массы опускаемого каната, выход которо го соединен с блоком компенсации, последовательно-соединенные блок разделения сигналов по амплитуде и блок управления, к выходу которого подключены аварийные сигнальные блоки и исполнител ные органы управления предохранительным тормозом подъемника и ловителем каната, отличающееся тем, что, с целью повышения надежности защиты и безопасности работы подъемника, силоизмерительный датчик выполнен в виде преобразователя акустического сигнала, вырабатываемого подшипником направляющего Органа каната в электрический сипнал, причем устройство снабжено блоком выделения ударных нагрузок, узлом контроля наличия вращения привода подъемника, соединенным с блоком управления, и блоком выделения весового параметра сигнала преобразователя, подключенным входсм к выходу преобразователя акустического сигнала в электрический сигнал, а выходом - ко входам блока компенсации и блока выделения ударных нагрузок, соединенного выходом с блоком компенсации. 2.Устройство по п. 1, о т л и ч а ющ е е с я тем, что блок выделения весовогю параметра сигнала преобразователя выполнен на последовательно соединенных фильтре и детекторе. 3.Устройство по п. 1, о т л и ч а ющ е е с я тем, что блок выделения ударных нагрузок выполнен на трансформаторе. 4.Устройство по п. 1, о т л и ч аю щ е е с я тем, что блок управления содержит триггеры, узел сброса, логический элемент ИЛИ и логические элементы И, один из входов которых соединен с выходом узла контроля на1тичия вращения привода подъемника,- другие - с выходом блока разделения сигналов по амплитуде, а выходы - с одними из входов ссотве- ствующих триггеров, выход одного из которых соединен с одним из аварийных сигнальных блоков и одним из входов элемента ИЛИ, а второго - с другим входом элемента ИЛИ, соединенного выходсйч с исполнительным органом управления предохранительным тормозом подъемника, и с другим аварийным сигнальным блоком и с HcnpnHHTenbHbnyf органом управления ловителя каната, причем другие входы триггеров соед1гаены с узломсброа. Источники информации, принятые во в шмaниe при экспертизе 1. Авторское свидетельство СССР 528248, кл. В 66 В 5/14, 31.01.75, 2. Авторское свидетельство СССР o 287268, кл. Q О5 q 15/06, 08.05.69 (прототип).