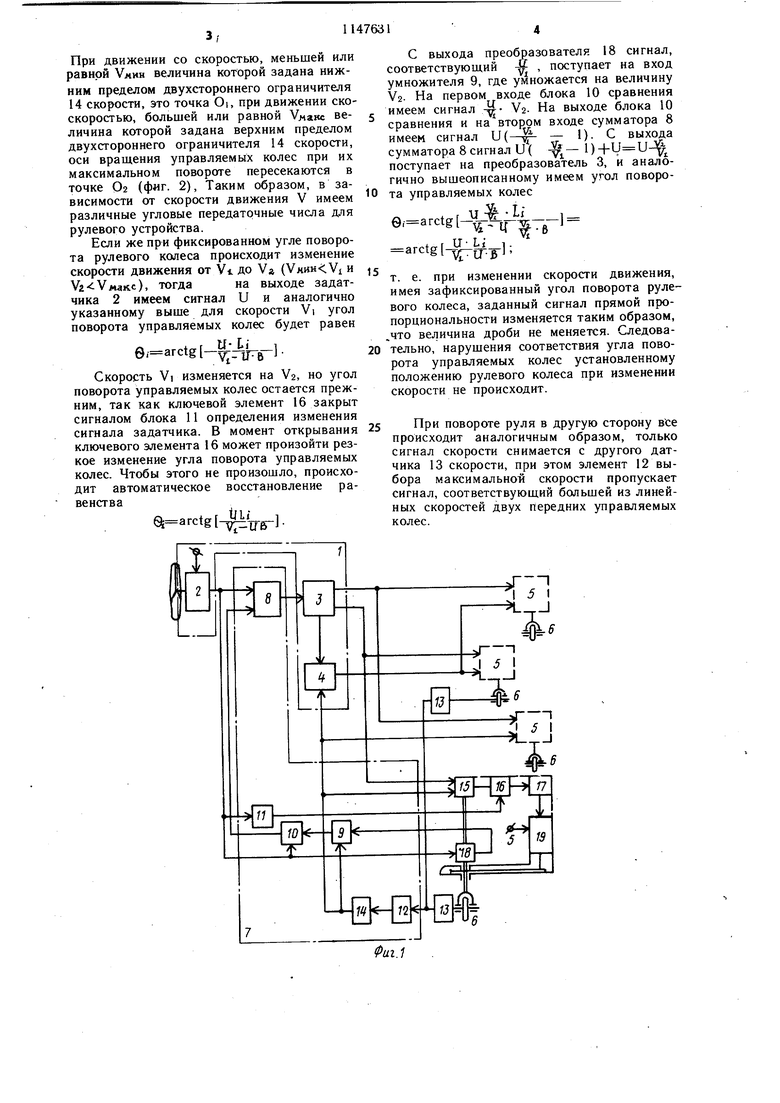
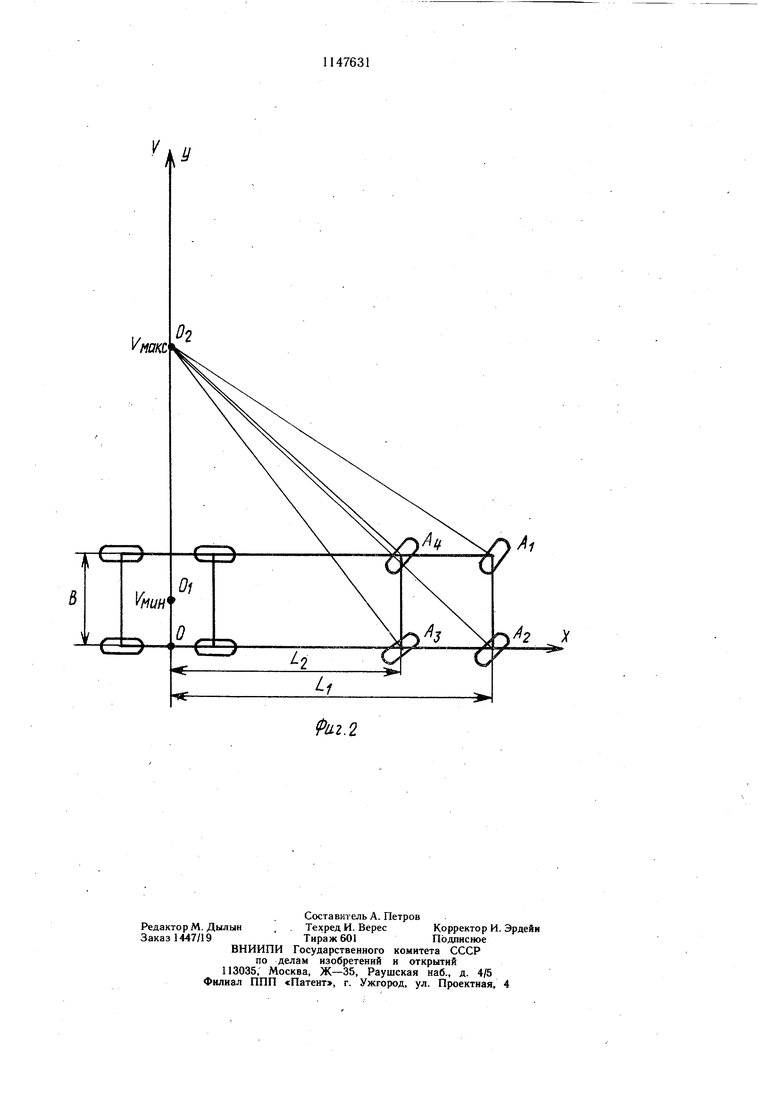
Изобретение относится к рулевым устройствам управления колесными шасси и может использоваться в большегрузных колесных шасси в маневровом режиме. Цель изобретения - повышение эффективности управления на малых скоростях. На фиг. 1 приведена структурная схема устройства, на фиг. 2 - схема колесного шасси. Устройство рулевого управления содержит блок Сформирования сигналов, пропорциональных углу поворота колес, состояш,ий из за датчика 2, преобразователя 3 и сумматора 4, и подключенные к его выходу следящие приводы 5 по числу управляемых колес б, а также блок 7 коррекции углового передаточного числа, состоящий из сумматора 8, умножителя 9, блока 10 сравнения, блока 11 определения изменения сигнала задатчика и последовательно соединенных элемента 12 выбора максимальной скорости, вход которого подключается к датчикам 13 скорости двух управляемых колес, и двухстороннего ограничителя 14 скорости. Выход двухстороннего ограничителя 14 скорости подключен к первому входу умножителя 9, вторым входам датчиков 15 обратной связи следящих приводов 5 двух колес и первому входу сумматора 4. Следящий привод 5 одного из колес 6 содержит ключевой элемент 16, информационный вход .которого подключен к выходу датчиков 15 обратной связи, выход - к усилителю 17 мощности, а управляющий вход через блок 11 определения изменения сигнала задатчика к выходу задатчика 2, и механически связанный с датчиком 15 преобразователь 18, вход которого подключен к выходу задатчика 2, а выход - к второму входу умножителя 9, выход которого подключен к первому входу блока 10 сравнения, второй вход которого подключен к выходу задатчика 2, а выход - к второму входу сумматора 8, выход которого подключен к входу преобразователя 3. Выходной вал исполнительного привода 19, соединен с осью поворота колеса (фиг. 1). Управляемое колесо AI движущегося транспортного средства (фиг. 2) поворачивается вокруг оси поворота на угол e,arctg - g-. где В и LI - координйты оси поворота колёса в прямоугольных координатах ХОУ; R(V) - радиус поворота, функционально зависящий от скорости, в первом приближении можно при нять, что R(V)V. Одновременно изменяя LI и В от нуля до конечных величин . и В мин , задавая при этом различные значения R (V) в пре делах некоторого заданного интервала скоростей, можно получить для одних и тех же значений LI и В различные величины угла 0i т. е. осуществить зависимость углового передаточного числа рулевого устройства от скорости движения. Если изменение скорости происходит при фиксированных LI и В, то изменения величины угла 9i не происходит. Этот принцип и заложен в работу устройства рулевого управления. При повороте колесного транспортного средства на постоянной скорости устройство работает следующим образом. Датчики 13 скорости располагаются на двух крайних управляемых колесах, причем привод одного из них снабжен ключевым элементом 16 и преобразователем 18. При повороте рулевого колеса на угол от нулевого до максимального при движении транспортного средства с постоянной скоростью на выходе задатчика 2 сигнал изменяется в пределах от О до , при этом на выходах преобразователя 3 формируются сигналы, подаваемые на второй вход сумматора 4, пропорциональные поперечной координате В и продольным координатам L ocefi двух управляемых колес 6. На выходе сумматора 4 образуется сигнал разности напряжений, соответствующий большей скорости V и поперечной координате В. Этот сигнал подается на вторые входы датчиков 15 обратной связи двух следящих приводов 5. На вторые входы двух других датчиков 15 поступает сигнал, соответствующий скорости V. На первые входы всех датчиков 15 поступают сигналы преобразователя 3, соответствующие изменению продольной координате L. BJ ок 11 определения изменения сигнала задатчика 2 открывает ключевой элемент 16 и следящий привод отрабатывает угол поворота колес до величины ei arctg 4 - При этом на выходе преобразователя 18 формируется сигнал, соответствующий , который, проходя через умножитель 9, умножается на V и поступает на первый вход блока 10 сравнения. Таким образом на оба входа блока 10 сравнения поступают сигналы, изменяющиеся в пределах от О до Умакс, поэтому на выходе блока 10 сравнения сигнала отсутствует. Следовательно, при нулевом положении рулевого колеса управляемые колеса параллельны оси ОХ, а при крайнем положении рулевого колеса, в зависимости от скорости движения, оси вращения управляемых колес пересекаются в точках, лежащих в интервале R () - R(VMiKc ). Величина интервала подбирается таким образом, что он охватывает сравнительно невысокие скорости движения, которыми характеризуется маневровый режим работы колесного транспортного -средства. При движении со скоростью, меиьшей или равной VMHH величина которой задана нижним пределом двухстороннего ограничителя 14 скорости, это точка Оь при движении скоскоростью, большей или равной Удаве величина которой задана верхним пределом двухстороннего ограничителя 14 скорости, оси вращения управляемых колес при их максимальном повороте пересекаются в точке 02 (фиг. 2), Таким образом, в зависимости от скорости движения V имеем различные угловые передаточные числа для рулевого устройства. Если же при фиксированном угле поворота рулевого колеса происходит изменение скорости движения от Vi до Va ( и Уг- Умакс), тогдана выходе задатчика 2 имеем сигнал U и аналогично указанному выше для скорости Vi угол поворота управляемых колес будет равен 0,arctg - - g-l Скорость Vi изменяется на Va, но угол поворота управляемых колес остается прежним, так как ключевой элемент 16 закрыт сигналом блока 11 определения изменения сигнала задатчика. В момент открывания ключевого элемента 16 может произойти резкое изменение угла поворота управляемых колес. Чтобы этого не произошло, происходит автоматическое восстановление равенства6i-arctg i g-.
J1 С выхода преобразователя 18 сигнал, соответствуюш,ий - , поступает на вход умножителя 9, где умножается на величину Va. На первом входе блока 10 сравнения имеем сигнал V2. На выходе блока 10 сравнения и на втором входе сумматора 8 имеем сигнал U(- - 1). С выхода сумматора 8 сигнал и( -l)+y Uпоступает на преобразователь 3, и аналогично вышеописанному имеем угол поворота управляемых колес 0.- arctg - fj l- ; --l arctg y.. т. е. при изменении скорости движения, имея зафиксированный угол поворота рулевого колеса, заданный сигнал прямой пропорциональности изменяется таким образом, что величина дроби не меняется. Следовательно, нарушения соответствия угла поворота управляемых колес установленному положению рулевого колеса при изменении скорости не происходит. При повороте руля в другую сторону вСе происходит аналогичным образом, только сигнал скорости снимается с другого датчика 13 скорости, при этом элемент 12 выбора максимально скорости пропускает сигнал, соответствующий большей из линейных скоростей двух передних управляемых колес.
U2.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| Рулевое устройство транспортного средства со всеми управляемыми колесами | 1978 |
|
SU766942A1 |
| Устройство рулевого управления колесного транспортного средства | 1978 |
|
SU742232A1 |
| Рулевое устройство колесного транспортного средства | 1978 |
|
SU766941A1 |
| Рулевое управление транспортного сред-CTBA CO ВСЕМи упРАВляЕМыМи КОлЕСАМи | 1979 |
|
SU823206A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Устройство для управления движением адаптивного транспортного робота | 1983 |
|
SU1138786A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| Устройство определения и индикации углов крена самолета | 1991 |
|
SU1827361A1 |
УСТРОЙСТВО РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА, содержащее связанный с рулевым колесом блок формирования сигналов, пропорциональных углу поворота колес, состоящий из задатчика, преобразователя и сумматора, и подключенные к его выходу следящие приводы по числу управляемых колес, отличающееся тем, что, с целью повыщения эффективности управления на малых скоростях, оно снабжено блоком коррекции углового передаточного числа, состоящим из сумматора, умножителя, блока сравнения, блока определения изменения сигнала задатчика и последовательно соединенных элемента выбора максил альной скорости, вход которого подключается к датчикам скорости двух управляемых колес, и двухстороннего ограничителя скорости, выход которого подключен к первому входу умножителя, вторым входам датчиков обратной связи следящих приводов двух колес и к первому входу сумматора блока формирования сигналов, пропорциональных углу поворота, причем следящий привод одного из колес содержит ключевой элемент, информационный вход которого подключен к выходу датчика обратной связи, выход - к усилителю мощности, а управляющий вход через блок определения изменения сигнала задатчика - к выходу задатчика, и механически связанным с датчиком обратной связи преобразователем, вход которого подключен к выходу задатчика, а выход - к второму входу умножителя, выход которого подключен к первому входу блока сравне(Л ния, второй вход которого подключен к выходу задатчика, а выход - к второму входу сумматора, выход которого подключен к входу преобразователя блока формирования сигналов, пропорциональных углу поворота колес. 05 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство рулевого управления колесного транспортного средства | 1978 |
|
SU742232A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
