Изобретение относится к робототехнике и может быть использовано при созданий робототехнических систем различного назначения, в частности подвижных транспортных роботов-ис- 5 следователей, функционирующих на пересеченной местности, содержащей участки различной проходимости.
Р звестио устройство для управления движением адаптивного транспортного робота, coдepжac ee последовательно соединенные блок сенсорных датчиков, блок формирования модепи внешней среды на данньй момент времени, вычислительный блок, содер- 5 жащий матрицу их 2 ключевых элементов, - стабильный триггер, где - количествоСтолбцов матрицы вы-:: числительного блока, и блок исполнительных механизмов, вькод которого 20 подключен к соответствующему входу вычислительного блока, причем первый, второй и пятый входы каждого ( i S j )-го ключевого элемента вычислительного блока соединены с 25 соответствуюп5имч входами вычислительного блока f.
Недостаток известного устройства заключается в том, что маршрут, синтезируемьш такой системой управ- 30 ления, не всегда является оптимальным в смысле минимума времени, затрачиваемого на достижение цели. Это является следстзвием того, что иденти кация поверхности, по ко- 35 торой осу1цествляетея движение робота, решается как задача дихотомии: отнесение каждого участка поверхности либо к классу пpeoдoли Dыx, либо к классу непреодолимых препятствий, 40 т.е. входом вычислительного блока является булева функция, принимающая значение О в слзгчае наличия препятствий или t при отсутствии препятствий в данном анализируемом 45 участке поверхности. В условиях реальной вИешней среды, содержащей участки различной проходимости, из за наличия крутых подъемов, спусков
каменистой почвы, зыбучих пескав, 50 трясины и т.п., использование такой системы управления приведет к тому, что всякий раз будет выбираться кратчайший маршрут до, цели пути. Однако кратчайшему маршруту будет 55 соответствовать минимум времени движения транспортного робота пу-. ти только в случае однородной местности, когда объект движется по каждому участку местности с одинаковой, постоянной скоростью. В случае неоднородной местности кратчайший путь может быть пройден за время,, значительно превьшающее время движения по другому, более длинному маршруту, двигаться по которому можно с более высокой скоростью. Кроме того, выбор маршрута через участки, не содержащие непреодолимых препятствий но с-низкой несущей способностью грунта, может привести к выходу из строя или гибели.транспортного робота.
Цель изобретения - повьшение быстродействия и безопасности движения адаптивного транспортного робота к заданному местоположению « условиях неоднорсщной по рельефу и несущей способности опорной поверхности,
Йостааленйая цель достигается тем, что в устройство для управления движегенем адаптивного транспортного робота, содержащее последовательно соединенгаме блок сенсорных датчиков, блок формирования модели внешней среды, вычислительный блок и последовательно соединенные -стабильный триггер и блок исполнительных механизмов, вькод которого подключен к соответствукаце1|4У-ВХОДУ вычислительного блока, донолнительно введены последовательно соединенные блок датчиков-измерителей характеристик местности и блок моделирования проходимости местности, выходы которого соединены с дополнительными входами вычислительного блока.
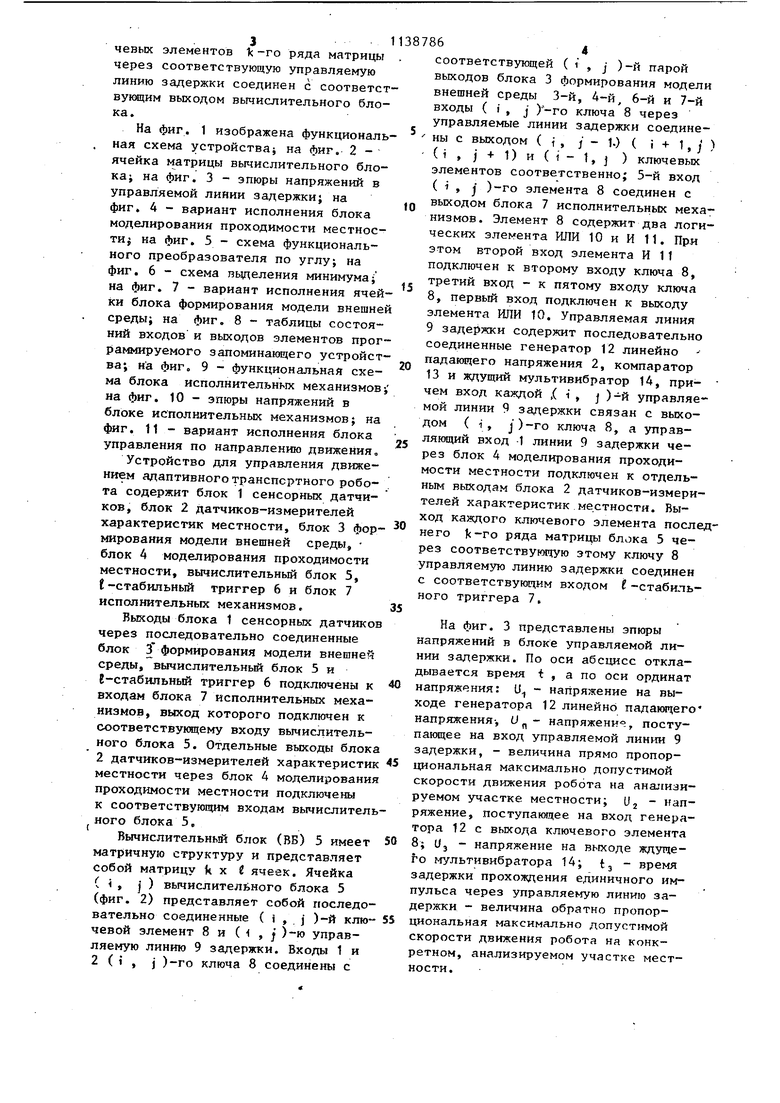
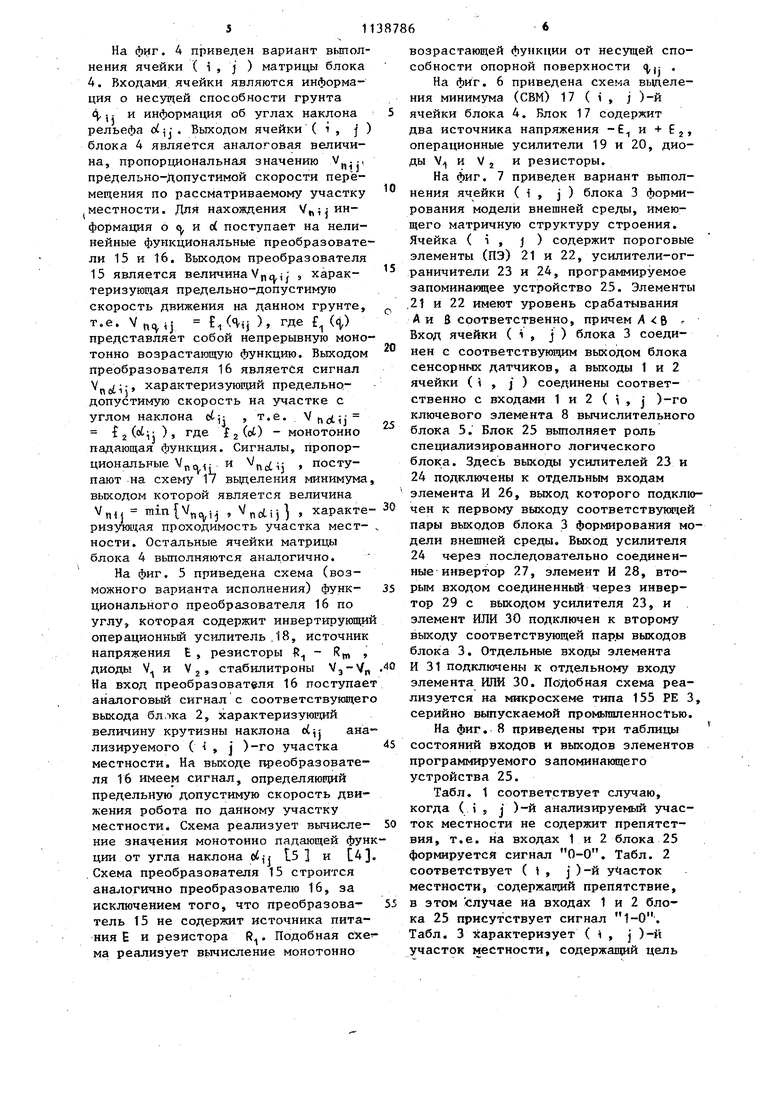
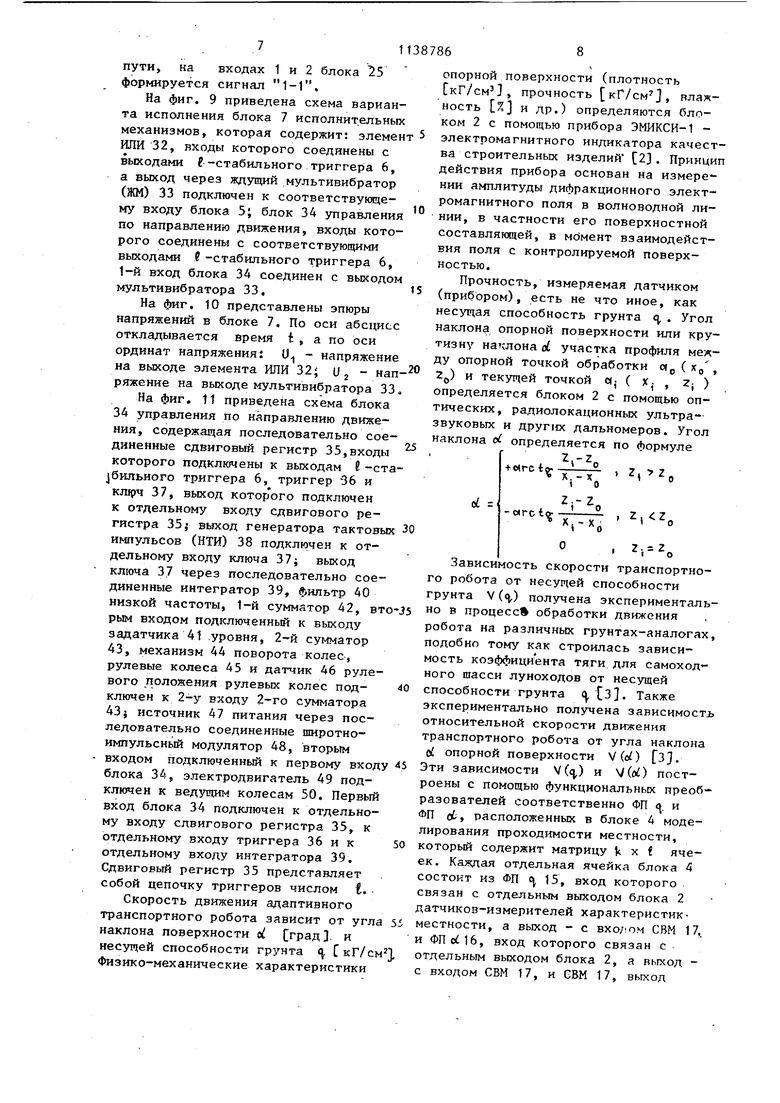
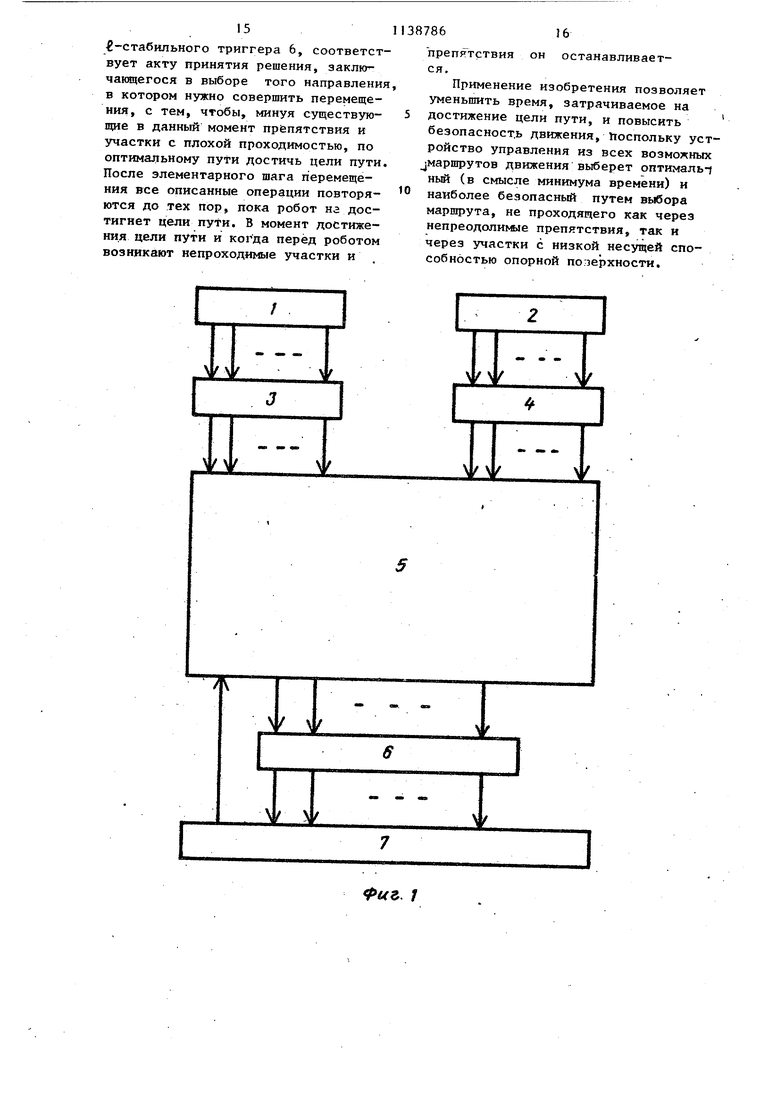
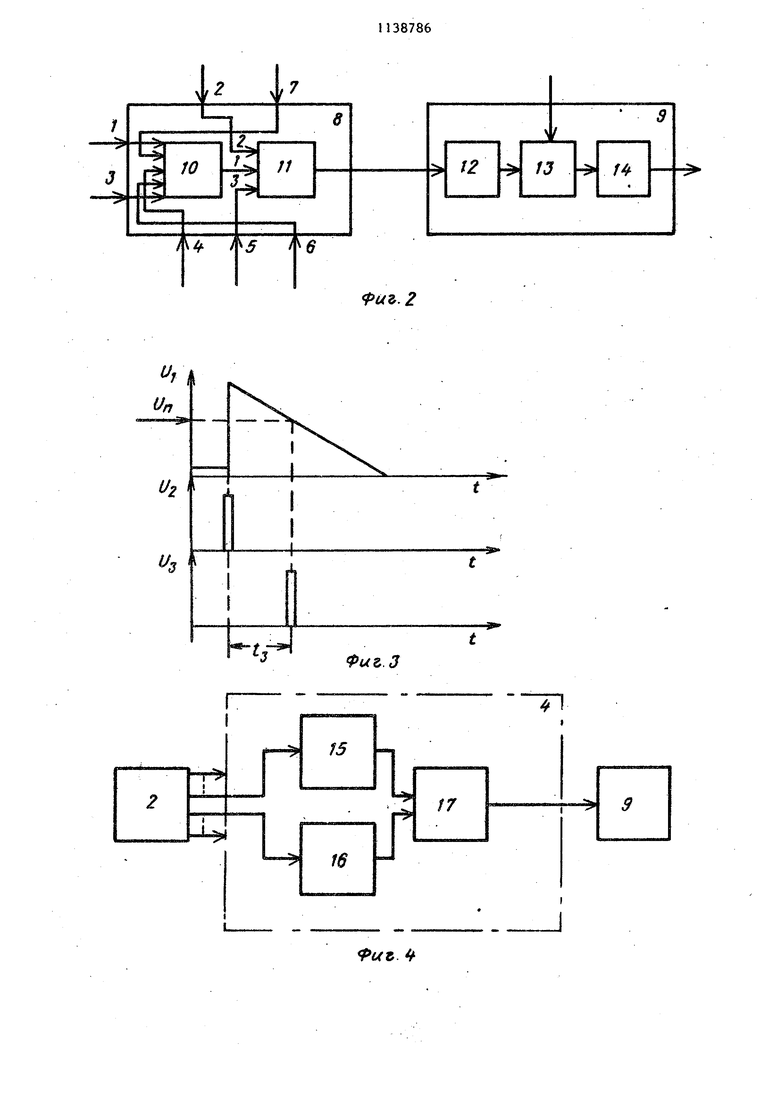
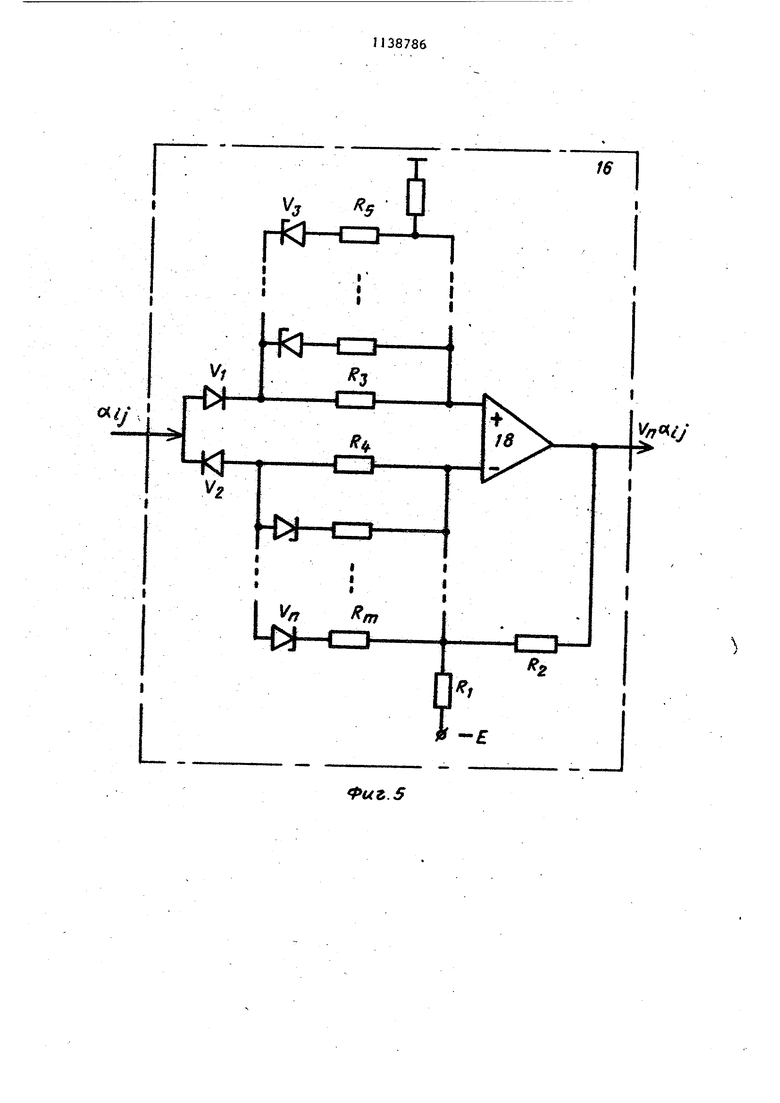
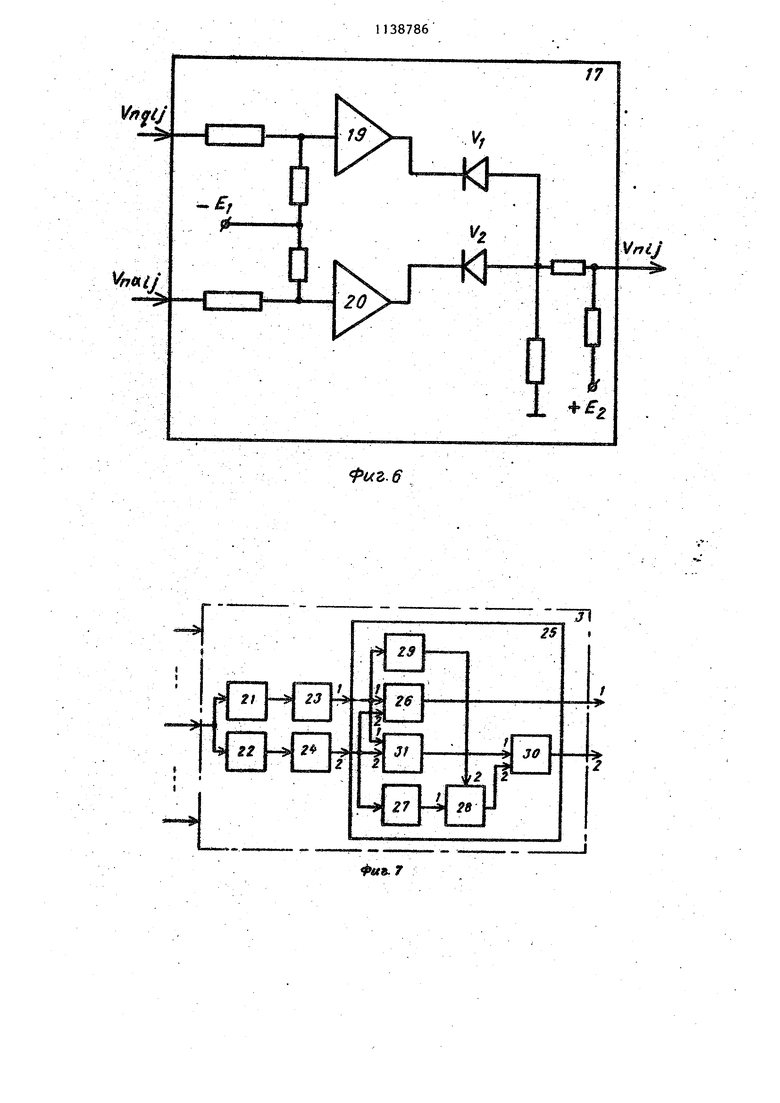
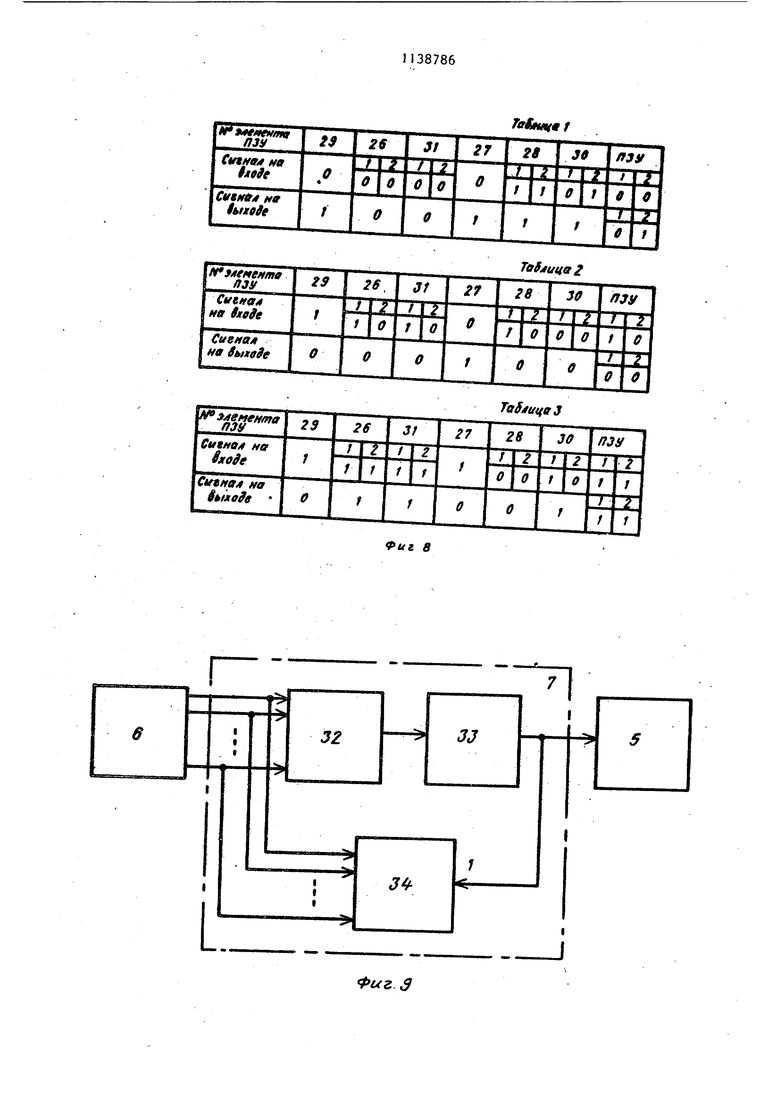
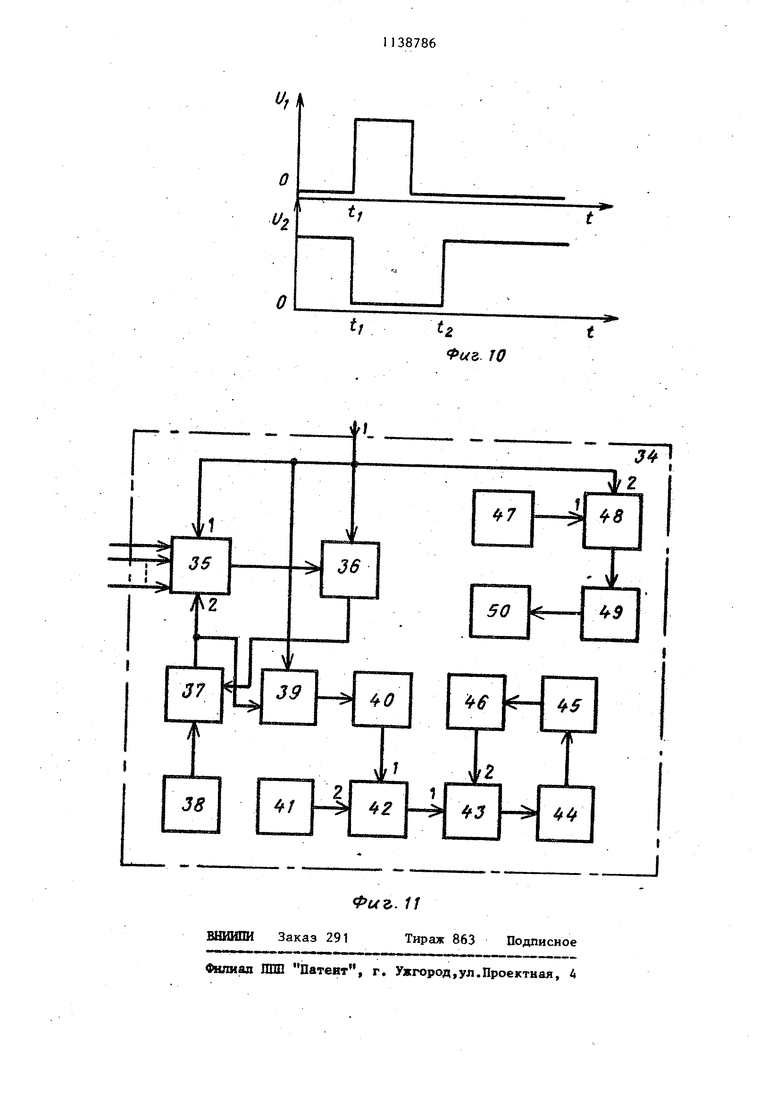
Кроме того, .вычислительный блок содержит матрицу k х S ключевьк элементов, причем первый, второй и пятый входы каждого ( i, j ) ключевого Элемента вычислительного блока, кроме It-го ряда матрицы, соединены с соответствующими входами вычислительного блока, а выход- каждого (i , j ) ключевого элемента, кроме ряда матрицы, через управляемые линии задержки соединен с третьим входом ( i , j + 1), четвертым входом ( i - 1, j ) , шестьпу входом ( i , j - 1), седьмым входом ( i + 1, j ) ключевых элементов, yпpaвляюпI e входы упр ляемых линий задержки соединены с дополнительными входами вычислительного блока, а выход ключевых элементов 1 -го ряда матрицы через соответствующую управляемую линию задержки соединен с соответствукщим выходом вычислительного блока. На фиг. 1 изображена функциональная схема устройстваJ на фиг. 2 ячейка матрицы вычислительного блока; на фиг. 3 - эпюры напряжений в управляемой линии задержки; на фиг. 4 - вариант исполнения блока моделирования проходимости местности; на фиг. 5 - схема функционального преобразователя по углу; на фиг. 6 - схема вьщеления минимума; на фиг. 7 - вариант исполнения ячейки блока формирования модели внешней среды; на фиг. 8 - таблицы состояний входов и выходов элементов программируемого запоминакяцего устройства; на фиг о 9 - функциональная схема блока исполнительных механизмов на фиг. 10 - эпюры напряжений в блоке исполнительных механизмов; на фиг. 11 - вариант исполнения блока управления по направлению движения, Устройство для управления движением адаптивного транспортного робота содержит блок 1 сенсорных датчиков, блок 2 датчиков-измерителей характеристик местности, блок 3 формирования модели внешней среды, блок 4 моделирования проходимости местности, вычислительный блок 5, t-стабильный триггер 6 и блок 7 исполнительных механизмов. Выходы блока 1 сенсорных датчиков через последовательно соединенные блок 3 формирования модели внешней среды, вычислительный блок 5 и Е-стабильный триггер 6 подключены к входам блока 7 исполнительных механизмов, выход которого подключен к соответствукщему входу вычислителького блока 5. Отдельные выходы блока 2 датчиков-измерителей характеристик местности через блок 4 моделирования проходимости местности подключены к соответствующим входам вычислитель ного блока 5. Вычислительньй блок (ВБ) 5 имеет матричную структуру и представляет собой матрицу k X г ячеек. Ячейка ( , j ) вычислительного блока 5 (фиг. 2) представляет собой последовательно соединенные ( i , . j )-й ключевой элемент 8 и ( , j )-ю управляемую линию 9 задержки. Входы 1 и 2 (i , j )-го ключа 8 соединены с соответствующей ( i , j )-й парой выходов блока 3 формирования модели внешней среды 3-й, 4-й, 6-й и 7-й входы ( i , J )-го ключа 8 через управляемые линии задержки соединены с выходом ( i , У - 10 ( i + 1, У ) (i , j + 1) и ( i - 1, j ) ключевых элементов соответственно; 5-й вход ( i , у )-го элемента 8 соединен с выходом блока 7 исполнительньос механизмов. Элемент 8 содержит два логических элемента ИЛИ 10 и И 11. При этом второй вход элемента И 11 подключен к второму входу ключа 8, третий вход - к пятому входу ключа 8, первый вход подключен к выходу элемента ИЛИ 10. Управляемая линия 9 задержки содержит последовательно соединенные генератор 12 линейно падающего напряжения 2, компаратор 13 и ждущий мультивибратор 14, причем вход каждой X i, j )-й управляемой линии 9 задержки связан с выходом ( 1, j)-ro ключа 8, а управляющий вход 1 линии 9 задержки через блок 4 моделирования проходимости местности подключен к отдельным выходам блока 2 датчиков-измерителей характеристик местности. Быход каждого ключевого элемента последнего -го ряда матрицы блока 5 через соответствующую этому ключу 8 управляемую линию задержки соединен с соответствующим входом t-стабильного триггера 7, На фиг. 3 представлены эпюры напряжений в блоке управляемой линии задержки. По оси абсцисс откладывается время t , а по оси ординат напряжения: U - напряжение на выходе генератора 12 линейно падающего напряжения-, q напряжение, поступающее на вход управляемой линии 9 задержки, - величина прямо пропорциональная максимально допустимой скорости движения робота на анализируемом участке местности; Uj - напряжение, поступающее на вход генератора 12 с выхода ключевого элемента 8; Uj - напряжение на выходе ждущего мультивибратора 14; tj - время задержки прохождения единичного импульса через управляемую линию задержки - величина обратно пропорциональная максимально допуст тмой скорости движения робота на конкратном, анализируемом участке местности. 51 На фиг. 4 приведен вариант выполнения ячейки ( i , j ) матрицы блока А. Входами ячейки являются информация о несущей способности грунта ji и информация об углах наклона рельефа . Выходом ячейки ( i , j ) блока 4 является аналоговая величина, пропорциональная значению j предельно-Допустимой скорости перемещения по рассматриваемому участку местности. Для нахождения V,,4j информация о с и с( поступает на нелинейные функциональные преобразователи 15 и 16. Выходом преобразователя 15 является величина э характеризующая предельно-допустимую скорость движения на данном грунте, Т.е. {(«Vij ), где (() представляет собой непрерывную моно тонно возрастающую функцию. Выходом преобразователя 16 является сигнал netii характеризующий предельнодопустимую скорость на участке с углом наклона , т.е. . iz(el - монотонно падающая функция. Сигналы, пропорциональные . и V.. , поступают на схему 17 выделения минимума выходом которой является величина nij noLij , характе ризутачая проходимость участка местности. Остальные ячейки матрицы блока 4 выполняются аналогично. На фиг. 5 приведена схема (возможного варианта исполнения) функционального преобразователя 16 по углу, которая содержит инвертирующи операционный усилитель .18, источник напряг сения Е , резисторы Rm диоды V и Vj, стабилитроны Vj-V,, На вход преобразователя 16 поступае аналоговый сигнал с соответствующег выхода бллка 2, Характеризующий величину крутизны наклона ана лизируемого ( , j )-го участка местности. На выходе тфеобразователя 16 имеем сигнал, определяющий предельную допустимую скорость движения робота по данному участку местности. Схема реализует вычи-сление значения монотонно падающей фун ции от угла наклона с, t5 и 4 .Схема преобразователя 15 строится aHajiorH4Ho преобразователю 16, за исключением того, что преобразователь 15 не содержит источника питания Е и резистора R.. Подобная схе ма реализует вьтисление монотонно 6 возрастающей функции от несущей способности опорной поверхности , На фиг. 6 приведена схема вьщеления минимума (СВМ) 17 ( i , j )-й ячейки блока 4. Блок 17 содержит два источника напряжения -€., и + Ej, операционные усилители 19 и 20, диоды V и V и резисторы. На фиг. 7 приведен вариант выполнения ячейки ( i , ) блока 3 формирования модели внешней среды, имеющего матричную структуру строения. Ячейка ( i , j ) содержит пороговые элементы (ПЭ) 21 и 22, усилители-ограничители 23 и 24, программируемое запоминакщее устройство 25. Элементы ,2 и 22 имеют уровень срабатывания Аи В соответственно, причем Л 6 Вход ячейки ( i , j ) блока 3 соединен с соответствующим выходом блока сенсорных датчиков, а выходы 1 и 2 ячейки (i , J ) соединены соответственно с входами 1 и 2 ( i , j )-го ключевого элемента 8 вычислительного блока 5. Блок 25 вьтолняет роль специализированного логического блока. Здесь выходы усилителей 23 и 24 подключены к отдельным входам элемента И 26, выход которого подключен к первому выходу соответствунячей пары выходов блока 3 формирования модели внешней среды. Выход усилителя 24 ч-ерез последовательно соединенные инвертор 27, элемент И 28, вторым входом соединенный через инвертор 29 с выходом усилителя 23, и элемент ИЛИ 30 подключен к второму выходу соответствующей пары выходов блока 3. Отдельные входы элемента И 31 подключены к отдельному входу элемента ИЛИ 30. Подобная схема реализуется на микросхеме типа 155 РЕ 3, серийно выпускаемой промышленностью. На фиг. 8 приведены три таблицы состояний входов и выходов элементов программируемого запоминакяцего устройства 25. Табл, t соответствует случаю, когда (is j )-й анализируемый участок местности не содержит препятствия, т.е. на входах 1 и 2 блока 25 формируется сигнал 0-0, Табл. 2 соответствует ( 1 , j )-й участок местности, содержащий препятствие, в этом случае на входах 1 и 2 блока 25 присутствует сигнал 1-0. Табл. 3 характеризует ( i , j )-й участок местности, содержащий цель пути, ка входах 1 и 2 блока 5 формируется сигнал 1-1. На фиг. 9 приведена схема варианта исполнения блока 7 исполнительных механизмов, которая содержит: элемен ИЛИ 32, входы которого соединены с выходами f-стабильного триггера 6, а выход через ждущий мультивибратор (ЖМ) 33 подключен к соответствующему входу блока 5; блок 34 управления по направлению движения, входы которого соединены с соответствующими выходами S -стабильного триггера 6, 1-й вход блока 34 соединен с выходом мультивибратора 33, На фиг. 10 представлены эпюры напряжений в блоке 7. По оси абсцисс откладывается время t, а по оси ординат напряжения: U - напряжение на выходе элемента ИЛИ 32j Uj - нап ряжение на выходе мультивибратора 33 На фиг. 11 приведена схема блока 34 управления по направлению движения, содержащая последовательно соединенные сдвиговь й регистр 35,входы которого подключены к выходам -ста j6HHbHoro триггера 6, триггер 36 и кл{рч 37, выход которого подключен к отдельному входу сдвигового регистра 35J выход генератора тактовых импульсов (НТИ) 38 подключен к отдельному входу ключа 37; выход ключа 37 через последовательно соединенные интегратор 39, фильтр 40 низкой частоты, 1-й сумматор 42, BTO рым входом подключенный к выходу задатчика 41 .уровня, 2-й сумматор 43, механизм 44 поворота колес, рулевые колеса 45 и датчик 46 рулевого положения рулевых колес подключен к 2-у входу 2-го сумматора 43J источник 47 питания через последовательно соединенные широтноимпульсный модулятор 48, вторым входом подключенный к первому входу блока 34J электродвигатель 49 подключен к ведусщм колесам 50. Первый вход блока 34 подключен к отдельному входу сдвигового регистра 35, к отдельному входу триггера 36 и к отдельному входу интегратора 39. Сдвиговый регистр 35 представляет собой цепочку триггеров числом t,Скорость движения адаптивного транспортного робота зависит от угла наклона поверхности с и несущей способности грунта ( СкГ/см Физико-механические характеристики опорной поверхности (плотность кГ/смЗ, прочность кГ/CMJ, влажность % и ЛР.) определяются блоком 2 с помощью прибора ЭМИКСИ-1 электромагнитного индикатора качества строительных изделий 2. Принцип действия прибора основан на измерении амплитуды дифракционного электромагнитного поля в волноводной линии, в частности его поверхностной составлякядей, в момент взаимодействия поля с контролируемой поверхностью. Прочность, измеряемая датчиком (прибором), есть не что иное, как способность грунта . . Угол наклона опорной поверхности или крутизну наклона oL участка профиля между опорной точкой обработки « ( , 2(j) и текущей точкой ч,- ( х,- , Zj ) определяется блоком 2 с помощью оптических, радиолокационных ультразвуковых и друг11х дальномеров. Угол наклона of определяется по формуле + о(гс ty г,2„ N-% -«гоt Z,Zo Зависимость скорости транспортного робота от несущей способности грунта V ({,) получена экспериментально в процесс обработки движения робота на различных грунтах-аналогах, подобно тому как строилась зависимость коэффициента тяги для самоходного шасси луноходов от несущей способности грунта . Сз. Также экспериментально получена зависимость относительной скорости движения транспортного робота от угла наклона oi опорной поверхности V(o) Гз}. Эти зависимости V(cj,) и l(oL) построены с помощью функциональных преобразователей соответственно ФП . и ФП oi, расположенных в блоке 4 моделирования проходимости местности, который содержит матрицу }с х f ячеек. Ка.ддая отдельная ячейка блока 4 состоит из ФП f 15, вход которого связан с отдельным выходом блока 2 датчиков-измерителей характеристикместности, а выход - с вхо/юм СВМ 17, и , вход которого связан с отдельным выходом блока 2, а выход с входом СВМ 17, и СВМ 17, выход которой связан с соответствующим входом вычислительного блока 5. Устройство работает следукяцим образом. Перед -началом вьшолнения каждого элементарного шага движения на выхо де 5лока 7 исполнительных механизмо появляется запрещающий сигнал О, который поступает на третьи входы элементов И 11 и блокирует их. Таким образом, на всех выходах ключевых элементов блока 5 сигналы отсутствуют, следовательно, сигналы отсутствуют и на выходах ( -стабиль ного триггера 6, и робот движет,ся по инерции, В это же время на вход каждой ( i, j )-й ячейки блока 3 формирования внешней среды (фиг. 7) с соответствующего выхода блока 1 сенсорных датчиков поступа.ет сигнал в виде аналоговой величины О , характеризующий или наличие препятств (в этом случае В), или отсутствие препятствия (С ) в кон кретном рассматриваемом участке местности. Если же в ( 1 , j )-м участке местнс сти находится цель, в направлении которой робот должен перемещаться, например помещен угол ковый отражатель, то величина С 7в В случае, когда ( t ,. j )й участок местности не с.одержит препятствия, на вход пороговых элементов 21и 22 поступает сигнал С, величина которого ( и ) меньше порога срабатывания rif)poroBbrx элементов 21 и 22. Та:ким образом, на выходах элементов 21 и 22, кото- рые подключены через усилители 23 и 24 к 1-у и 2-у входам блока 25 со,ответственно, сигналы отсутствуют. Тем самым на входах 1 и 2 блока 25 формируется сигнал На выходах 1 и 2 блока 25 - сигнал 0-1 соответственно. В этом случае на 1-м входе ( i , I )-го ключа 8 блока 5, соединенном с 1-м выходом ячейки ( i , j ) блока 3, появляется О, а на 2-м входе ключа 8, соединенном с 2-м выходом ячейки ( i , j) блока 3 - 1. Если ( , i )й участок местност содержит препятствие ( А С С В ), сигнал, поступанщий на вход ( i , j)-й ячейки блока 3, вызывает срабатывание только порогового элемент 21, на выходе порогового элемента 22сигнал отсутствует, следовательн 610 на выходе усилителя 24 будет О, на выходе усилителя 23 - 1. Таким образом, на входах 1 и 2 блока 25 формируется сигнал 1-0. В этом случае на 1-ми 2-м выходах блока 25 будет О, следовательно и на входах 1 и 2 ( i , j )-го ключа 8 блока 5 будет О. Если ( i, j )-й участок местности содержит цель ( С 7 А и ), то в этом случае сигнал, поступающий на вход { i , J )-й ячейки блока 3, вызовет срабатывание пороговых элементов 21 и ПЭ 22. С выхода этих элементов сигналы проходят через усилители 23 и 24 и поступают на входы блока 25, т.е. на входе блока 25 формируется сигнал 1-1, в этом на обоих выходах блока 25 и на входах 1 и 2 (i , )-го ключа 8 „ ц блока 5 появл яется 1 Каждому участку поверхности той местности, по которой перемещается робот, соответствует один ключ 8 блока 5. Пусть (i , j )-й ключ 8 соответствует участку местности, в котором находится цель. В этом случае на 1,-й и 2-й входы ( t, j ) -го ключа 8 поступают единичные сигналы 1. На выходе элемента ИЛИ 10 ( i , j )-го клйча 8 независимо от вида других сигналов, поступающих на вход ИЛИ 10 ( , )-го ключа 8, будет Г (фиг. 2). После окончания запрещакяцего сигнала, формируемого блоком 7 исполнительных механизмов, на 5-й вход всех ключевых элементов блока 5, поступает разрешающий сигнал t, следовательно, на 3-й вход элемента И 11 ( , J )-го ключа 8 поступит 1. Таким образом, так как в (h , i )-м участке местности расположена цель, то на всех входах И 11 ( i , j )-го ключа 8 присутствуют единичные сигналы, следовательно, и на выходе этого ключа 8 будет 1, .т.е. ( i , j )-й участок ключа 8, ко- Topbrii соответствует участку, в направлении которого нужно двигаться, является генератором импульса. В момент после окончания запрещающего сигнала, формируемого блоком 7, на входах элемента ИЛИ 10 любого другого ключа, не соответствующего участку, содержащему цель, будут О, поэтому и на выходе элементов ИЛИ 10 будут о , т.е. на 1-м входе элементов И 11 тоже будут О. А так как в этот момент на 3-м входе элементов И 11 всех ключей присутствует .1,то независимо от вида сигнала на 2-м входе этих элементов И 11, на выходе ключевых элементов, не соответствующих участку местности, содержащему цель пути, будет О. С выхода ( i , j )-го ключа 8 единичный сигнал через ( i , j )-ю уп равляемую линию 9 задержки поступает на вход элементов ИЛИ 10 ( 1 , J - 1)-го, « , J + 1)-го, ( i - 1, j)-ro и ( t 4- 1, j )-го ключевых элементов блока 5. Следовательно, на выходе элементов ИЛИ 10 и на 1-м входе элементов И 11, соответствукяци перечисленным ключевым элементам, будет 1. Единичный сигнал будет и на 3-м входе этих элементов И 11. Таким образом, если, например, ( i , j-- 1)-й, (i - 1, j )-й и ( I + 1, ) -и ключевые элементы соответствуют запрещенным для движения участкам местности, то на 2-й вход, связанный с 2-м входом И 11 этих ключей, поступит О, и эти ключевые элементы окажутся блокированными, непроводящими, так как на выходе элементов И 11 и, следовательно, на выходе этих ключей будет О. Пусть (i , j + 1)-й ключ соответствует участку местности, свободному от препятствий, тогда на 1-м, 2-м и 3-м входах элемента И 11 и, следовательно, на выходе ( i , j+ 1)-гр ключа будет 1, т.е. этот ключ является проводящим. В то время, когда робот движется по инерции, на выходах блока 2 появляются сигналы в виде аналоговых величин, характеризующие проходимост местности или иначе несущую способность грунта « и угол наклона или крутизну d участка поверхности. Эти сигналы поступают на вход блока 4 и с помощью соответствующих функциональных преобразователей 15 и 16 преобразуются в сигналы характеризугацие предельно допустимую скорость движения робота для данного y iacTxa поверхности с углом наклона опорной поверхности и несущей способностью грунта jjj , т.е. соответствен JHoVheiij и Vn(,ij . Эти сигналы поступают на схему 17 выделения минимума. Выходом узла 17 является 86.12 величина . ,Vn,.j} , характеризующая проходимость.( i , j. )-го участка местности или иначе максимальную допустимую скорость движения робота по данному участку. Этот сигнал Vp,-; с выхода (i , j )-й ячейки блока 4 поступает на управлякщий вход ( i , j )-й управляемой линии 9 задержки блока 5 в качест-. ве опорного напряжения U . После окончания запрещакнцего сигнала, формируемого блоком 7 исполнительных механизмов, ключевой элемент блока 5, который соответствует участj y среды, содержащему цель пути. начинает генерировать и п1ульсы, распространякициеся во все стороны через проводящие ключевые элементы 8 и соотвётствуклцие им линии 9 задержки, обходя непроводящие ключевые элементы 8. Если ключ 8 является проводящим, Toi проходящий через него единичный сигнал, поступает на вход соответствзпощей линии 9 задержки и запускает генератор 12 линейно падающего напряжения. Напряжение, генерируемое генератором 12, сравнивается с опорным напряжением, поступающим на компаратор 13 через управляюЕщй вход линии 9 задержки с отдельного выхода блока 4. Б случае равенства этих напряжений запускается мультивибратор 14, который формирует сигнал, идентичный сигналу, поступающему с вьвсода ключа 8 на вход линии 9 задержки, т.е. время задёржки (фиг. 3) прохождения сигнала через линию 9 задержки обратно пропорционально максимально-допустимой скорости движения робота через со- ответствую1чий участок местности,, т.е. время задержки адекватно отображает проходимость каждого конкретного участка поверхности. Если несущая способность грунта а или крутизна наклона « местности не позволяют роботу продолжить движение, т.е. скорость робота равна О, то фактически окажется, что соответствзтгаций ключ 8 является блокировйнным, непроводящим. Путь сигнала, первым достигшего одного из входов f-стабильного триггера 6, является воспроизводимой на логической сети и управляемых линиях 9 задержки вычислительного блока 5 моделью- оптимального (в смысле минимума времени на достижение цели) пути транспортного робота к цели пути, учитывающей пр.охолимость отдельных участков местности. Каждому элементарному анализируемому участку поверхности, например, размера S х S соответствует один ключ, т.е. длина элементарного шага перемещения робота не должна превышать S, скорость перемещения V также ограничена. Таким образом, время, затрачиваемое на выполнение элементарного шага не превьпцает 4t 5/V, Пусть в момент времени i. сигнал который первым достиг одного из входов Е-триггера 6, через соответствуюрщй выход блока 6 поступит на вход элемента ИЛИ 32 блока 7, пе репад напряжения на выходе ИЛИ 32 запускает мультивибратор 33, которы формирует импульс, длительностью i-t , S X V (это достигается путем соответствующего подбора элементов мультивибратора 33), поступакнций на соответствующий вход блока 5. Та ким образом, в мойент времени t передний фронт импульса мультивибратора 33 (фиг. 10) блокирует ключевые элементы блока 5, и робот движется по инерции. Через время ,i -f: 2 t-, 5/ V на 5-й вход всех ключей блока.5 поступит разрешающий сигнал 1, В момент прихода первого сигнала на один из -входов С-триггера 6 остальные входы Е-три гера 6 блокируются, В момент времени i сигнал с одного из вькодов и -триггера 6 поступит на соответствующий вход сдвигового регистра 35 блока 34. В это же время передний фронт импульса мультивибратора 33 переводит и тегратор 39 в исходное нулевое сос тояние, поступает на отдельньй вход сдвигового регистра 35 как управля щий сигнал и переводит триггер 36 из исходного нулевого состояния в состояние, при котором на выходе триггера 36 появляется единичньй сигнал, который, поступая на вход ключа 37, открывает этот ключ. С генератора 38 тактовых импульсов ч рез замкнутый ключ 37 на отдельный вход сдвигового регистра 35 и на вход интегратора 39 начинают посту пать импульсы. Предположим, что си нал, первым достигший одного из вх доп -триггера 6, пришел с М-и ячейки (1 N ) последнего )-го ряда матрицы блока 5. Тогда соответственно на W-м триггере сдвигового регистра 35 будет 1, а на остальных - О. При появлении на выходе сдвигового регистра 35, подключенного к входу триггера 36, сигнала 1, триггер 36 переходит в исходное нулевое состояние и закрывает ключ 37. Сигнал выхода интегратора 39 через фильтр |40 низкой частоты поступает на вход 1 первого сумматора 42, на 2-й вход этого же сумматора 42 с выхода задатчика 41 уровня поступает сигнал заданной постоянной величины 11 . Если N-я ячейка ВБ 5 соответствует элементарному участку местности, разрешенному для движения транспортного робота, расположенному прямо по ходу движения, то на выходе Т-го сумматора будет О, и робот будет перемещаться прямолинейно вперед. В противном случае на выходе 1-го сумматора 42 появляется сигнал, поступавши на инвертируклций вход 1 второго сумматора. 43 определенной величины и знака. Знак этого сигнала характеризует отклонение рулевых колес вправо-влево, а величина сигнала пропорциональна углу курса движения объекта. Посредством механизма 44 поворота колес рулевые колеса 45 поворачиваются либь вправо, либо влево до тех пор, пока сигнал с выхода датчика 46 углового поло-, жения рулевых колес, поступающий на 2-й вход сумматора 43, не будет равен по абсолютной величине сигналу на 1-м входе этого же сумматора 43, т«е. пока на выходе сумматора 43 не будет О. Таким образом, осуществляется управление роботом по курсу для движения по опти1-1альному маршруту. В момент t прихода первого сигнала на один из входов Е-стабильного триггера 6 сигнал с вы- хода ЖМ 33 поступает на 2-й вход широтно импульсного модулятора в качестве опорного напряжения. В результате этого регулируется время подключения источника 47 питания к электродвигателю 49, своим выходом подключенным к ведущим колесам 50. Таким образом, фиксация сигнала, ервым достигшего одного из входов
15
6-стабильного триггера 6, соответствует акту принятия решения, заклкгчанщегося в выборе того направлени в котором нужно совершить перемещения, с тем, чтобы, минуя существующие в данный момент препятствия и участки с плохой проходимостью, по оптимальному пути достичь цели пути После элементарного шага перемещения все описанные операции повторяются до тех пор, пока робот на достигнет цели пути. В момент достижения цели пути и когда перёд роботом возникают непроходи№1е участки и
16
138786
препятствия он останавливается.
Применение изобретения позволяет уменьшить время, затрачиваемое на достижение цели пути, и повысить безопасность движения, Поспольку устройство управления из всех возможных маршрутов движения выберет оптималь ный (в смысле минимума времени) и наиболее безопасный путем выбора маршрута, не проходящего как через непреодолимые препятствия, так и через участки с низкой несущей способностью опорной поверхности.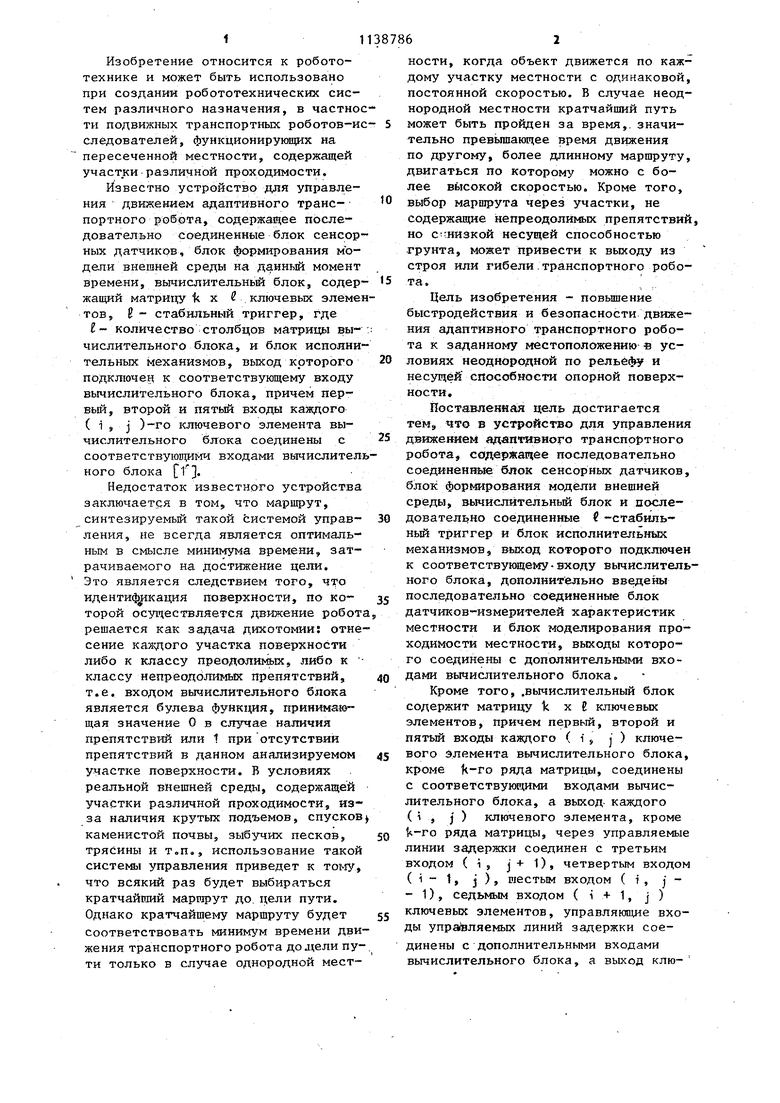
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением адаптивного робота | 1977 |
|
SU716807A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Устройство для считывания и обработки изображений | 1988 |
|
SU1513486A1 |
| Устройство ассоциативного распознавания образов | 1985 |
|
SU1330644A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| ЯЧЕЙКА ОДНОРОДНОЙ ВЫЧИСЛИТЕЛЬНОЙ СРЕДЫ, ОДНОРОДНАЯ ВЫЧИСЛИТЕЛЬНАЯ СРЕДА И УСТРОЙСТВО ДЛЯ КОНВЕЙЕРНЫХ ВЫЧИСЛЕНИЙ СУММЫ м n-РАЗРЯДНЫХ ЧИСЕЛ | 2011 |
|
RU2475815C1 |
| АССОЦИАТИВНЫЙ ВЫЧИСЛИТЕЛЬ СМЕЩЕНИЯ ЦЕНТРА ТЕКУЩЕГО ИЗОБРАЖЕНИЯ ОТ ЦЕНТРА ЭТАЛОННОГО | 1991 |
|
RU2029358C1 |
| Ассоциативная однородная обучаемая среда для распознавания объектов | 1983 |
|
SU1149287A1 |
| Устройство цифровой информации | 1991 |
|
SU1815653A1 |
| Устройство для оптимизации работы параллельных процессов | 1988 |
|
SU1569844A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АДАПТИВНОГО ТРАНСПОРТНОГО РОБОТА, содержащее последова- . тельно соединенные блок сенсорных датчиков, блок формирования модели внешней среды, вычислительный блок и последовательно соединенйые 8-стабильный триггер и блок исполнительньк механизмов, выход которого подключен к соответствуючему входу вычислительного блока, отличаюп( ее с я тем, что, с целью повышения быстродействия и повышения безопасности движения адаптивного транспортного робота к заданному местоположению в условиях неоднородной по рельефу и несущей способности опорной поверхности, в устройство введены последовательно соединенные блок датчиков-измерителей характеристик местности и блок моделирования проходимости местности , выходы кото рого соединены с дополнительными входами вычислительного блока. 2. Устройство по п. 1, отличающееся тем, что вычислительный блок содержит матрицу Л х t ключевых элементов, причем первый, второй и пятый входы каждого ( i , | ) ключевого элемента вычислительного блока, кроме ряда матрицы, сое|Динены с соответствующими входами ; вычислительного блока, a выход каждого ( i , j ) ключевого элемента , СО кроме It-го ряда матрицы, ерез уп оо равляеные линии задержки соединен с ч третьим входом ( i, j + 1), четвер 00 тьм входом ( f - 1, j ), шестым входом ( i, j- 1), седьмым входом о ( 1, j ) ключевых элементов, управляияцие входы управляемых линий задержки соединены с дополнительными входами вычислительного блока, выход ключевых элементов |с-го ряда матрицы через соответствукщуюуправляемую линию задержки соединен с соответствующим выходом вычислительного блока.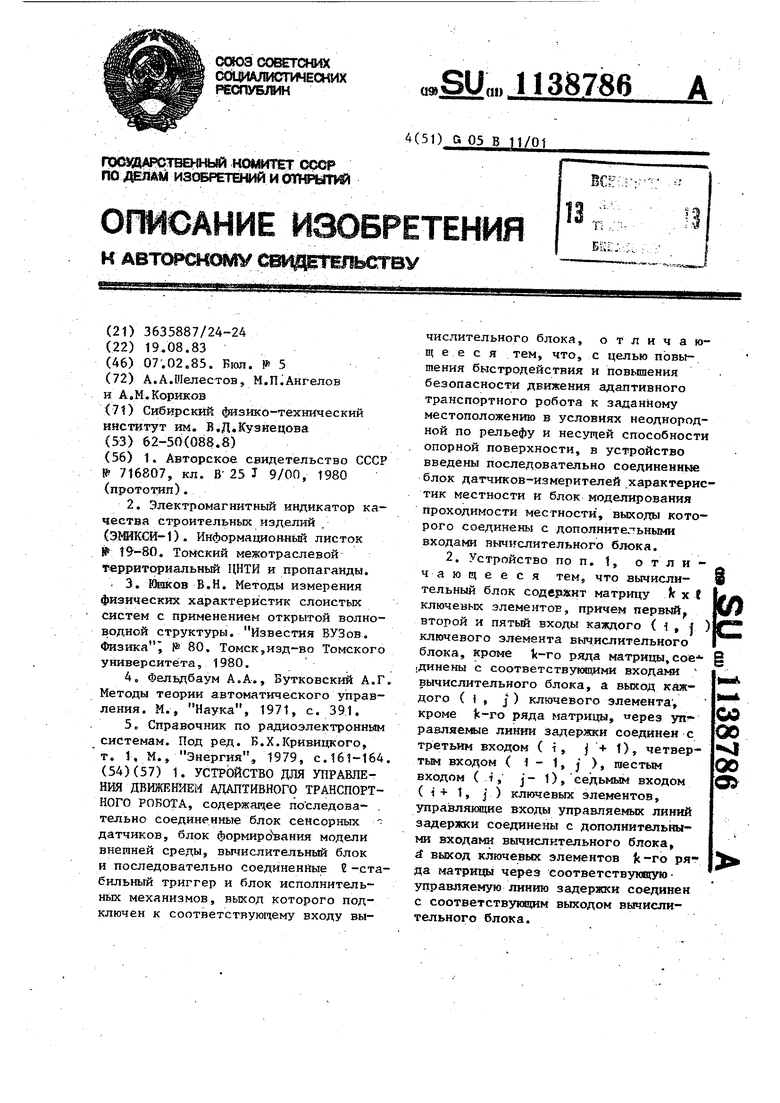
L(.
f
r Л
f
М
f
.;
11
10
г
t Л5 А
3
12
13
1
иъ.2
15
г
И
W
Т1
17
1Л
цг.
Vj %
w rW«//
(/
40
г
I
Фиг. 5
Фаь.7
Tfffmtter
8
Фиг.Э
м о
U2
tz Фиг, JO
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления движением адаптивного робота | 1977 |
|
SU716807A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Юшков В.Н | |||
| Методы измерения физических характеристик слоистых систем с применением открытой волноводной структуры | |||
| Известия ВУЗов | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Томск,изд-во Томского университета, 1980 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Фельдбаум А,А., Бутковский А.Г | |||
| Методы теории автоматического управления | |||
| М., Наука, 1971, с | |||
| Ситценабивная машина | 1922 |
|
SU391A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Под ред | |||
| В.Х.Кривицкого, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
