Изобретение относится к электротехнике, в частности к автоматизированному электроприводу, и может быть использовано в асинхронньт вентильньгх каскадах и двигателях двойного питания.
Известно устройство для упрйвления асинхронным электродвигателем с фазным ротором, содержащее преобразователь частоты в цепи ротора электродвигателя, синхронный датчик частоты вращения, фазовращатель, .формирователь низкочастотного управляющего напряжения и блок импульснофазового управления 1 J.
Однако это устройство обладает невысокой точностью синхронизации работы преобразователя и небольшим диапазоном регулирования, поскольку в нем появляются низкочастотные биения выходного напряжения.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления асинхронным электродвигателем с фазным ротором, содержащее тиристорньй преобразователь в цепи ротора электродвигателя, многоканальный блок синхронизации, входы которого подклк)чены к фазам роторной обмотки электродвигателя, а выходы - к блоку формирования управляющих импульсов тиристора преобразователя 2 .
В известном устройстве фйзовый сдвиг управляющего сигнала обеспечивается пассивным КЬ-фильтром,выходное напряжение которого является функцией частоты и амплитуды входного напряжения. Поэтому в известном устройстве затруднено поддержание на заданном уровне угла управления преобразователем, что приводит к ухудшению регулировочных характеристик электропривода.
Целью изобретения является расширение диапазона регулирования.
Указанная цель достигается тем, что в устройство для управления асинхронным электродвигателем с фаз Ним ротором, срдерж ее тиристорный преобразователь в цепи ротора электродвигателя, иногоканальHbtfk блок синхронизации, входы которого подключены к фазам роторной обмотки электродвигателя, а выходы к блоку формирования управляющих импульсов тиристорами, преобразователя, введены датчик угловой
493631
скорости электродвигателя, датчи- ки мгновенного тока фаз ротора электродвигателя, а каждый канал блока синхронизации содержит интегросумматор, шесть ключевых и два запоминающих элемента два согласующих усилителя и компаратор, причем первый, .вход интегросумма- . тора подключен к соответствующей
Q фаэной обмотке ротора электродвигателя, .выхЪд интегросумматора к входам компаратора, блока форми- рования управляющих импульсов, первого и второго ключевых элементов,
f выходы которых подключены соответственно через первый и второй запоминающие элементы к входам третьего и четвертого ключевых элементов, выходы которых объединены и подключены к входу второго интегросумматора, входы пятого и шестого ключевых элементов подключены соответственно через первый и второй .согласующие усилители к выходу
, датчика угловой скорости электродвигателя, выходы пятого и шестого ключевых элементов объединены и подключены к третьему входу интегро- сумматора, четвертый вход которого подключен к датчику мгновенного тока фаз ротора электродвигателя,управляющие входы ключевых элементов объединены и подключены к вькоду компаратора смежного канала блока синхронизации, выходы интегросумма5 торов образуют выходы многоканального блока синхронизации.
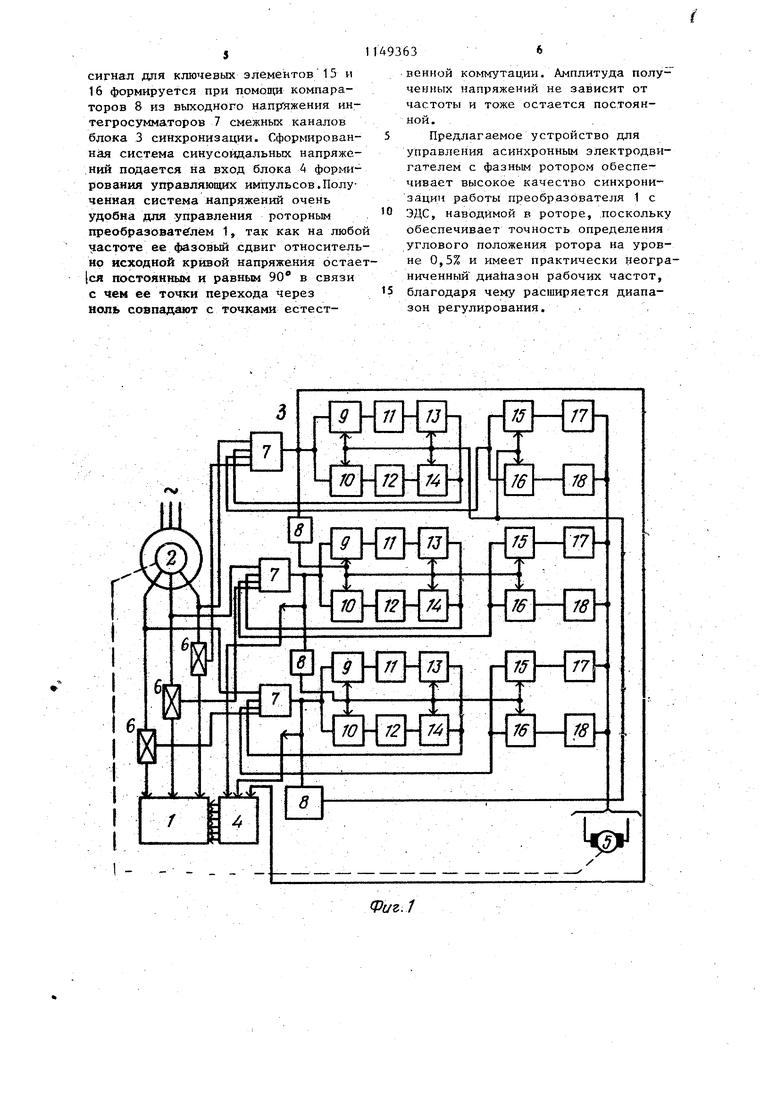
На фиг. 1 приведена функциональная схема предлагаемого устройства для управления асинхронным электродвигателем с фазным роторам; на фиг. 2 - диаграм1« 1 напряжений на выходе функциональных блоков устройства.
Устройство для управления асинхронным электродвигателем с фазным ротором содержит тиристорный преобразов атель 1 в цепи ротора электродвигателя 2, многоканальный блок 3 синхронизации, входы которого подключены к фазам роторной обмотки
электродвигателя 2, а выходы - к бло, ку 4 формирования управляилцих импульсов тиристорами преобразователя 1, датчик 5 угловой скорости электродвигателя 2, датчики 6 мгновенного тока Фаз ротора электродвигателя, а каждый канал блока 3 синхронизации содерлсит интегросумматор 7,
шесть ключевых и два запоминающих элемента, два согласующих элемента и компараторJ причем первый вход интегросумматора 7 подключен к фазному проводу обмотки ротора электродвигателя 2. выход интегросумматора 7 - к входам компаратора 8, блока 4 формирования управляющих импульсов тиристоров преобразователя 1, первого и второго ключевых элементов 9 и -10, выходы которых подключены еоответственно через первый и вторьй запоминакнцие элементы Пи 12 к входам третьего и четвёртого ключевых элементов 13 и 14, выходы которых объединены и подключены к второму входу интегросумматора 7 i входы пятого и шестого ключевьк элементов 15 и 16 подключены соответственно через первый и второй согласуюп(ие усилители 17 и 18 к выходу датчика 5 угловой скорости электродвига.теля 2 выходы пятого и шестого ключевых элементов 1 и 16 объединены и подключены к третьему входу интег.ррсум атора 7, четвертый вход которог подключен к датчику 6 мгновенного тока, управляющие входь всех ключевых элементов объед{ нены и подключены к выходу компаратора 8 смежно, гр ка:нала блока 3 синхронизации.
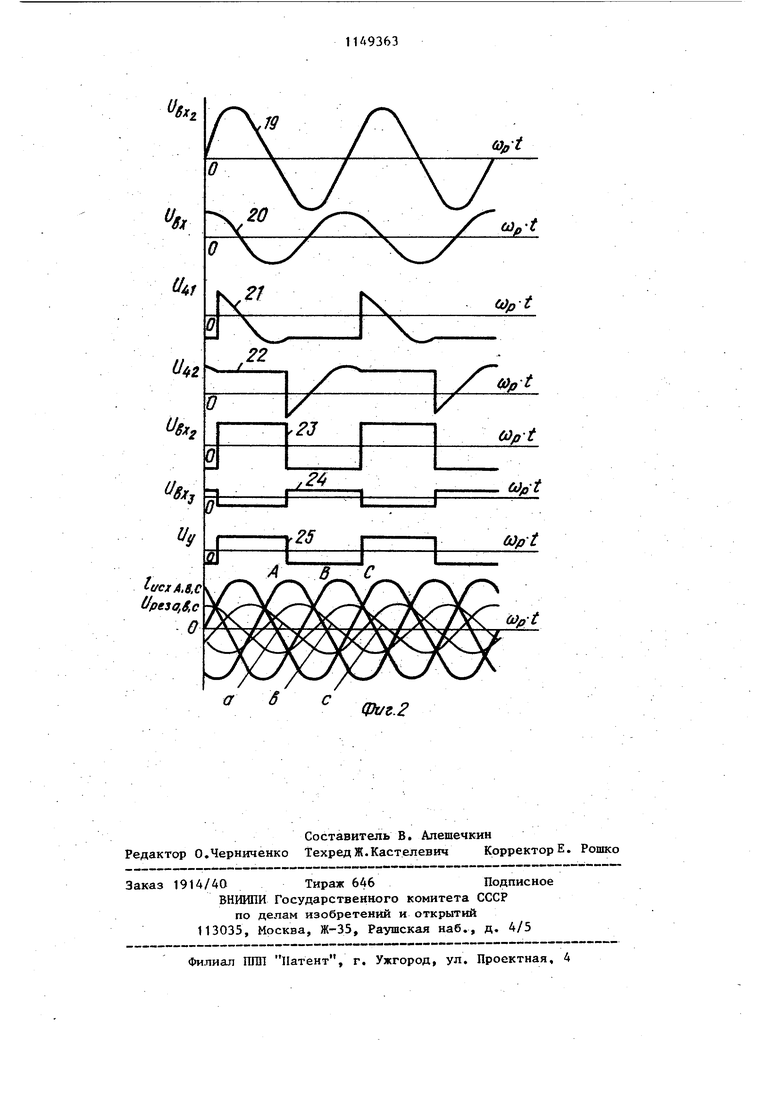
На диаграмме 19 (фиг. 2) показана кривая изменения фазной ЭДС, на диаграмме 20 - изменение выходного напряжения интегросумматора, на диагрш е4ах 21 и 22 - изменение напряжения на выходе запоминающих элементов, на диаграмме 23 - суммарный сигнал обратной связи; на диаграмме 24 - корректирукмций сигнал от датчика угловой скорости; на диаграыв в 25 :- управляющий сигнал ключевых элементов.
Устройство работает следующим .
напряжений j подаваемых на первые и четвертые входы интегросуммат ч а 7, представляет собой сигнал пропорциональный мгновенному значению ЭДС, наводимой в фазе ротора. Если бы рассматриваемая система быпа разоюснутой, то на выходе ййтегросуннаторов 7 появилось бы капрязкение, величину которого можно о|ф«делить по формуле
(shi« (« i v; {wpi|r
-E2,,|51co5(u)pi+4) +С
где Е - амплитуда ЭДС фазы заторможенного ротора;
S - скольжение;
tUp - круговая частота ЭДС ротбра;
t - время;
ц - начальная фаза.
Таким образом, в кривой выходного напряжения всегда присутствовала бы некоторая составляющая, ко,торая из-за флуктуации параметров реальных операционньпс усилителей росла бы и приводила интегросумматор 7 к насыщению. Поэтому при использовании интегросумматора 7 в рзомкнутой системе управления достижение раснгирения диапазона регулирования не обеспечивается.
В предлагаемой системе для компенсации влияния указанной постоянной составлякнцей используется дискретная обратная связь, которая осуществляется при помощи ячейки выборки и хранения, состоящей из Двух идентичных запоминаюпцсс элементов 11 и 12 и двух пар ключевых элементов 9, 10и13, 14, которые поочередно подключают входы запоминак1щих элементов 11 и 12 к выходу интегросуьматора 7, а выходы - к вторым входам интегросумматора 7. Переключение запоминающих элементов 11 и 12 происходит дважды в течение одного периода роторной ЭДС. Таким образом, на вход интегросумматора 7 от ячейки выборки и хранения поступает значение интеграла за предьдутцт полупериод, благодаря чему полностью компенсируется нежелательная постоянная -составляющая в выходном напряжении интегросумматора 7. При Изменении частоты вращения асинхронного электродвигателя 2 меняются и параметры наводимой в роторе ЭДС, что приводит к изменению влияния Сигнала обратной связи и к срыву работы преобразователя 1, Для компенсации этого изменения предусмотрена подача на третий вход интегросумматора 7 сигнала от датчика 5 угловой скорости, который предварительно преобразуется в переменное напряжение прямоугольной формы при помощи соглсующих усилителей 17 и 18 и ключевых элементов 15 и 1б. Управлякяций 5 сигнал для ключевых элементов15 и 16 формируется при тюмощи компараторов 8 из выходного напргяжения ннтегросумматоров 7 смежных каналов блока 3 синхронизации. Сформированная система синусоидальных напряже.НИИ подается на вход блока 4 формирования управляющих импульсов.Полу ченная система напряжений очень удобна для управления роторным преобразователем 1, так как на любо частоте ее фазовый сдвиг относитель но исходной кривой напряжения остае |ся постоянным и равным 90 в связи с чем ее точки перехода через ноль совпадшот с точками естест63венной коммутации. Амплитуда полученных напряжений не зависит от частоты и тоже остается постоянной. Предлагаемое устройство для управления асинхронным электродвигателем с фазным ротором обеспечивает высокое качество синхронизации работы преобразователя 1 с ЭДС, наводимой в роторе, поскольку обеспечивает точность определения углового положения ротора на уровне 0,5% и имеет практически неограниченный диапазон рабочих частот, благодаря чему расширяется диапазон регулирования, .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Способ синхронизации асинхронного электродвигателя | 1980 |
|
SU955485A1 |
| Устройство для моделирования @ -фазного вентильного двигателя постоянного тока | 1985 |
|
SU1312620A1 |
| Электропривод постоянного тока | 1990 |
|
SU1739467A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод | 1978 |
|
SU797043A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЬМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ, содержащее тиристорный преобразователь в цепи ротора электродвигателя, многоканальный блок синхронизации, входы которого подключены к фазам роторной обмотки электродвигателя, а выхо; - к блоку формирования управляющих импульсов тиристорами преобразователя, отличающее с я тем, что, с целью расширения диапазона регулирования, в него введены датчик угловой скорости электродвигателя, датчики мгновенного тока фаз ротора электродвигателя, а каждый канал блока синхронизации содержит интегросумматор, шесть ключевых и два запоминающих элемента, два согласующих усилителя и компаратор, причем первый вход интегросумматора подключен к соответствующей фазной обмотке ротора электродвигателя, выход интегросумматора - к входам компаратора, блока формирования управлякшщх импульсов, первого и второго ключевых элементов, выходы которых подключены соответственно через первый и второй запоминающие элементы к входам третьего и четвертого ключевых элементов выходы которых объединены и подключены к второму входу интегросумма(Л тора, .входы пятого и шестого ключевых элементов подключены соответственно через первый и второй согла- сукщяе усилители к выходу датчика угловой скорости электродвигателя, выходы пятого и шестого ключевых элементов объединены и подключены 4 СО СО к третьему входу интегросумматора, четвертый вход которого подключен к Датчику | яновенного тока фаз ротора о электродвигателя, управляющие входы со ключевых элементов объединены и подключены к выходу компаратора смежного канала блока синхронизацииj выходы интегросуь4маторов образуют выходы многоканального блока синхронизации.
g.
и.
%i
21
22
V2J
2
6
(Uflt
(t)p t
fOpt
Ci}fit
(Opt
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Щукин Г.А | |||
| Исследование статических характеристик машины двойного питания, работающей в асинхронном режиме | |||
| Дис | |||
| на соиск | |||
| учен, степени канд | |||
| техн | |||
| наук | |||
| М., 1970, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Онищенко Г.Б | |||
| Асинхронньй вентильный каскад | |||
| М., Энергия, 1967, с | |||
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
