Изоирегеине отиосигся к анаушг ово вьшнслительной технике и может найти применение при разработке и исследовании вентильных двигателей постоянного тока (ВДПТ) и приводов на их ос нове.
Цель изобретения расширение фун ционяльных возможностей за счет возможности совместной работы с реально схемой управления и повышение точности.
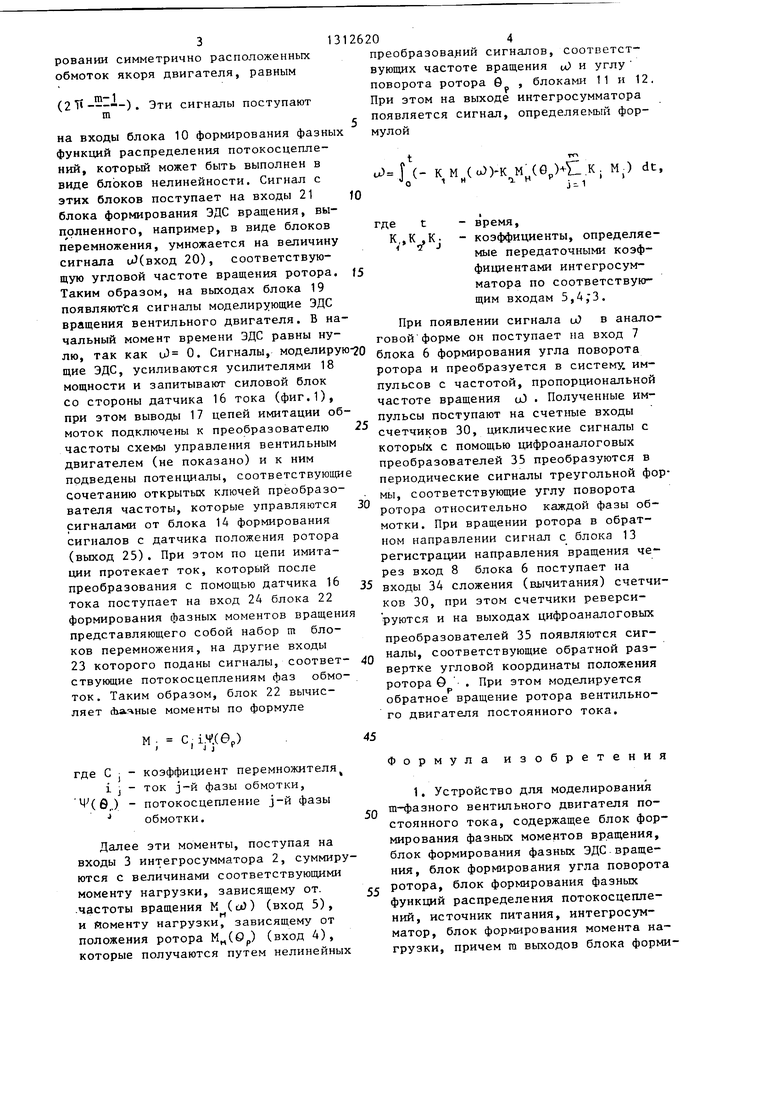
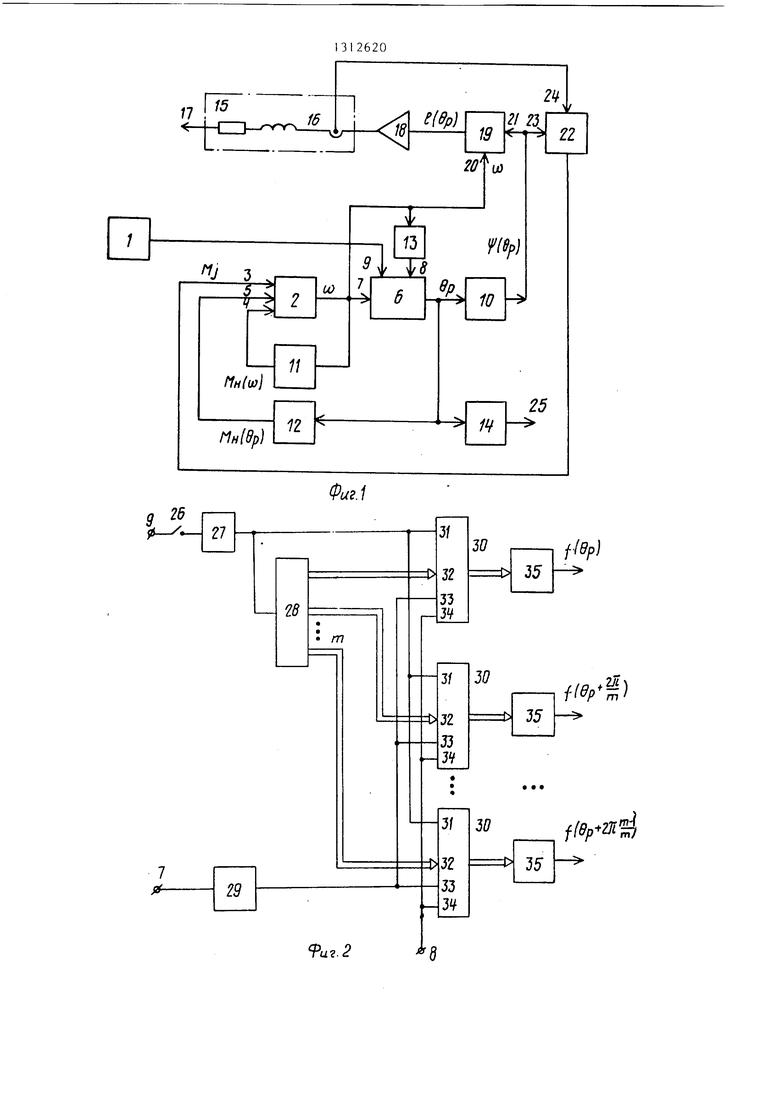
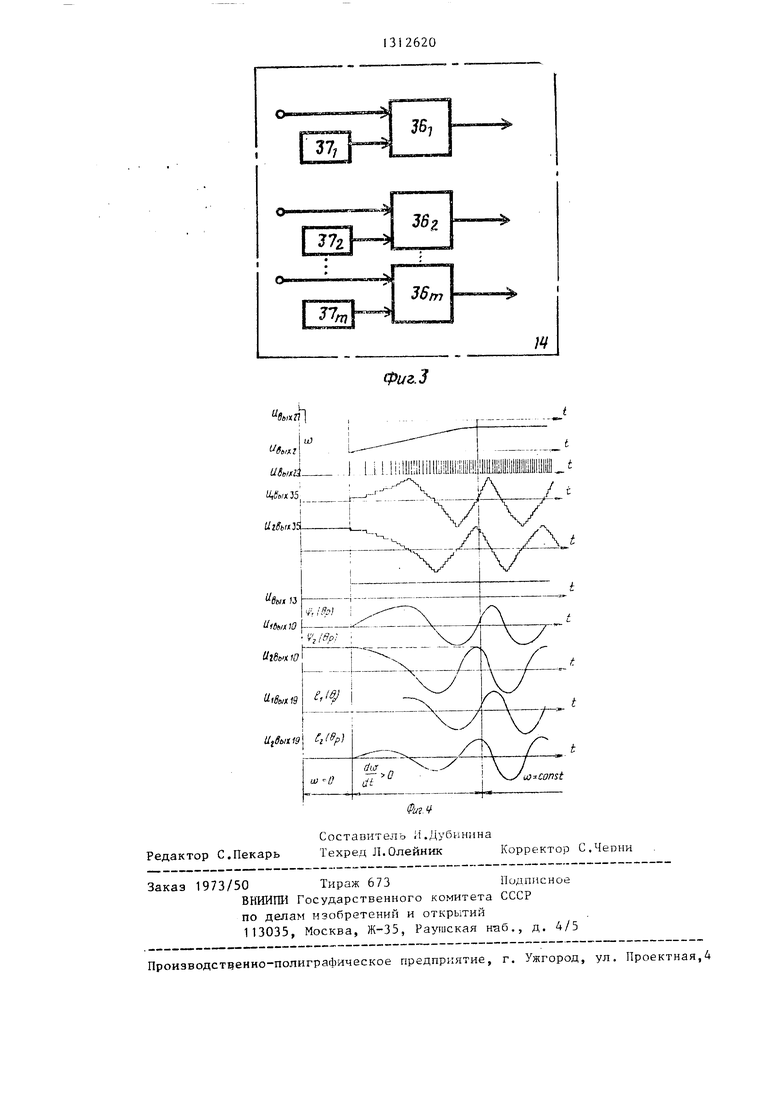
На фиг.1 представлена структурна схема устройства для моделирования ш-фазного вентильного двигателя постоянного тока; на фиг.2 - схема блока формирования угла поворота ротора; на фиг.З - блок формирования сигналов датчика положения ротора; на ibnr.4 - иременные диаграммы.
Устройство для моделирования т-фазного вентильного двигателя по- с.тояпного тока содержит источник 1 литания, интегросумм 1тор 2, Имеющий группу входов 3, вход 4 и второй вход 5, блок 6 формирования угла иопорота ротора, импопцп пер- Bbri i вход 7, второй вход 8 и третий рход 9, блок 10 формирования фазтгых функциГ распределения иотокосцеи- лений, блок 11 формирования момента нагрузки, блок 12 нелине/ пюсти, блок 13 регистрации направления вра- Я1ения, блок 14 фop п poвaIИIя сигналов датчика положения ротора, силовой блок 15, дат -1ик 16 тока, пыход
17неии имитации обмоток, усилитель
18мопиюсти, блок 19 формирования фазных ЭДС вращения, именощиГ первую группу входов 20 и вторую группу входов 21, блок 22 |;ормиро,п11ии (разных моментов вращения, имеющий первую гругп у входов 23 и : :: rjiyi -- иу входов 24, выходы 25 блока формирования сигналов датчи;:л Л1-;1г1жсиия .
Блок 6 формирования угла поворота ротора содер;й1т ключевой элемент 26, формирователь 27 импульсов, коммутатор 28, преобразователь 29 напря жение - частота, m N-разрядных счетчиков 30, имею|Д11х вход 31 разрешения записи, входы 32 разрядов, счетный вход 33 и вход 34 Сложение-вычитание, m цифроаналоговых преобразователей 35. Блок 14 формирования сигналов датчика положения ротора содержит m компараторов 36 и опорные источники 37 питания.
2
описывающие процессы вигателе, имеют вид
(6;, С) -1Лс)Кр
-Е,(а)р.0р),
I Ё- f dt fr,
М-- м(ер)
- .
15
0, JcJpdt, М V(0p) i(t).
Е..(в,).
30
где L., R . - индуктивность и ак- i о
тивное сопротивление
20 ,j-й фазы двигателя;
ijU))p,0р Qp. J, ЭДС вращения
j-й фазы двигателя; Uj(0 ,t) - напряжение на j-й
фазе двигателя} I - момент инерции ротора
и нагрузки;
К , - электромагнитный мо мент, создаваемый j-й фазой,
М (0),М(и))- момент, обусловленный несимметрией воздушного зазора, и момент, зависящий от частоты вращения ротора дви- 35гателя о) ;
Ф (0 ) - потокосцепление фазы ) Р
с полем ротора.
В данной модели не учтено насыщение цепи двигателя и взаимоиндук- 0 тивность фаз.
Устройство работает следующим образом.
При подаче питания на схемы уст45 ройства (фиг.1 и 2) и включении ключевого элемента 26 схемы запитывают- ся, а счетчики после появления на входе 31 разрешающего сигнала с формирователя 27 импульса устанавливают50 ся в исходное состояние путем подачи на входы 32 разрядов кодов с коммутатора 28, соответствующих начальным угловым положениям ротора относительно фаз обмоток якоря и угловому сдви55 ГУ между ЭДС вращения фаз обмоток. На выходе цифроаналоговых преобразователей 35 появляются напряжения, соответствующие угловой координате ротора с фазовым сдвигом при моделировании симметрично расположенных обмоток якоря двигателя, равным
() . Эти сигналы поступают
m
на входы блока 10 формирования фазных функций распределения потокосцепле- ний, который может быть выполнен в виде блоков нелинейности. Сигнал с этих блоков поступает на входы 21 блока формирования ЭДС вращения, выполненного, например, в виде блоков перемножения, умножается на величину сигнала и Свход 20), соответствующую угловой частоте вращения ротора. Таким образом, на выходах блока 19 появляют ся сигналы моделирующие ЭДС вращения вентильного двигателя. В наПри появлении сигнала и) в анало говой форме он поступает на вход 7
чальный момент времени ЭДС равны нулю, так как и} 0. Сигналы, моделирую-го б формирования угла поворота щие ЭДС, усиливаются усилителями 18 преобразуется в систему, им- мощности и запитывают силовой блок со стороны датчика 16 тока (фиг.1), при этом выводы 17 цепей имитации обмоток подключены к преобразователю 25 частоты схемы управления вентильным двигателем (не показано) и к ним подведены потенциалы, соответствующие сочетанию открытых ключей преобразо30
вателя частоты, которые управляются сигналами от блока 14 формирования сигналов с датчика положения ротора (выход 25). При этом по цепи имитации протекает ток, который после преобразования с помощью датчика 16 тока поступает на вход 24 блока 22 формирования фазных моментов вращения представляющего собой набор m блоков перемножения, на другие входы 23 которого поданы сигналы, соответствующие потокосцеплениям фаз обмоток. Таким образом, блок 22 вычисляет (Ьа-чные моменты по формуле
пульсов с частотой, пропорциональной частоте вращения оЗ . Полученные импульсы поступают на счетные входы счетчиков 30, циклические сигналы с которь1х с помощью цифроаналоговых преобразователей 35 преобразуются в периодические сигналы треугольной фо мы, соответствующие углу поворота ротора относительно каждой фазы обмотки. При вращении ротора в обратном направлении сигнал с блока 13 регистрации направления вращения через вход 8 блока 6 поступает на 5 входы 34 сложения (вь1читания) счетчи ков 30, при зтом счетчики реверсируются и на выходах цифроаналоговых преобразователей 35 появляются сиг40
налы, соответствующие обратной развертке угловой координаты положения ротора 0 . При этом моделируется обратное вращение ротора вентильного двигателя постоянного тока.
М . С..Ч-Хвр) ) J j
где С :-коэффициент перемножителя
i j-ток j-й фазы обмотки,
Ч (в„)-потокосцепление j-й фазы
обмотки.
Далее эти моменты, поступая на входы 3 интегросумматора 2, суммируются с величинами соответствующими моменту нагрузки, зависящему от. .частоты вращения М (о)) (вход 5), и йоменту нагрузки, зависящему от положения ротора М„(0р) (вход 4), которые получаются путем нелинейных
204
преобразований сигналов, соответст- вую1цих частоте вращения и) и углу поворота ротора 0 , блоками 11 и 12. При этом на выходе интегросумматора появляется сигнал, определяемый формулой
р
и) (- (а))(брН11 К. М) dt.
to
где
- время,
К,,К ,К- - коэффициенты, определяемые передаточными коэффициентами интегросумматора по соответствующим входам 5,4;3 .
При появлении сигнала и) в аналоговой форме он поступает на вход 7
б формирования угла поворота преобразуется в систему, им-
б формирования угла поворота преобразуется в систему, им-
пульсов с частотой, пропорциональной частоте вращения оЗ . Полученные импульсы поступают на счетные входы счетчиков 30, циклические сигналы с которь1х с помощью цифроаналоговых преобразователей 35 преобразуются в периодические сигналы треугольной формы, соответствующие углу поворота ротора относительно каждой фазы обмотки. При вращении ротора в обратном направлении сигнал с блока 13 регистрации направления вращения через вход 8 блока 6 поступает на входы 34 сложения (вь1читания) счетчиков 30, при зтом счетчики реверсируются и на выходах цифроаналоговых преобразователей 35 появляются сиг
налы, соответствующие обратной развертке угловой координаты положения ротора 0 . При этом моделируется обратное вращение ротора вентильного двигателя постоянного тока.
Формула изобретения
1. Устройство для моделирования т-фазного вентильного двигателя постоянного тока, содержащее блок формирования фазных моментов вращения, блок формирования фазньк ЭДС вращения, блок формирования угла поворота ротора, блок формирования фазных функций распределения потокосцепле- ний, источник питания, интегросум- матор, блок формирования момента нагрузки, причем га выходов блока форми513
рования фазных моментов вращения соединены с группой входов интегросум- матора, выход которого соединен с первым информационным входом блока формирования угла поворота ротора, с первой группой входов блока формирования фазных ЭДС вращения и входом блока формирования момента нагрузки, выход которого соединен с первым входом интегросумматора, m выходов блока формирования угла поворота ротора соединены с соответствующими входами блока формирования фазных функций распределения потоко- сцеплений, выходы которого соединены с второй группой входов блока формирования фазных ЭДС вращения и с соответствующими входаг-ш псрцон г руп- пы блока формирования фазных моментов вращения, отличающееся тем, что, с целью расшире)1ия функциональных возможностей за счет возможности совместной работы с реальной схемой управления н повышения точности, в него введены блок формирования сигналов датчика положения ротора, силовой блок, содержащий m цепей имитации обмоток, ка;кдая из которых состоит из последоБател1)о соединенных датчика тока, индуктнв-- ности и токозадающего резистора, а усилителей мощности, блок регистрации направления вращения и блок нелинейности, блок формирования сигналов дат чика положения ротора содержит и компараторов уровня, первь е вхо.ды которых соединены соответст е1П1о с выходами опорных источников питания, вторые входы m компараторов соединены с соответствующими входами бчока формирования сигналов датчика положении ротора, входы m компараторе являются выходами устройства, вььчод блока формирования угла noBopoiui ротора подключен к входам блотса фс1) вания сигналов датчика положения ротора и с входом блока нелинейности, выход которого соединен с вторым вхо до интегросумматора, выход, котогюго
26206
подключен к входу блока регистрации направления вращения, выход которого соединен с вторым информационным входом блока формирования угла пово5 рота ротора, вход питания которого подключен к выходу источника питания, выходы блока формирования фазных ЭДС вращения соединены с входами соответствующих m усилителей мощности, выходы которых подключены к входам датчиков тока соответствующих цепей имитации обмоток силового блока, выводы токозадаюгцих резисторов которого являются выходами устройства, выхо5 ды датчиков тока силового блока соединены с соответствующими входами второй группы блока формирования фаз ных моментов вращения,
2. Устройство по п.1, о т л и ч а0 10 щ е е с я тем, что блок формирования угла поворота ротора содержит преобразователь напряжение-частота, 111 N-разрядных счетчиков, m цифроана- логовых преобразователей, формирова5 тель импульсов, коммутатор, ключевой элемент, вход которого является входом питания блока формирования угла поворота ротора, выход ключевого элемента соединен с входом фор -шро0 вателя импульсов, ыхоц, которого соединен с входом кoм iyтaтopa и входами разрешения .записи m N-разрядных счетчиков, выходы коммутатора соединены с соответствующими входами раз5 рядов m N-разрядных счетчиков, вход преобразователя напряжение-частота является первым информационным входом блока формирования угла поворота ротора и соединен со счетными 0 входами m N-разрядных счетчиков, второй информацион11ый вход блока формирования угла ггонорчч-а ротора соединен г 111 входами С пкс-иге-Бычитание р. N-разрядных счст И1 ч1в, выходы ко5 горых соединены сооч ветствующими мходами соответствующих цифроанало- преобразователей, выходы которых являются выходами блока формирования угла поворота ротора.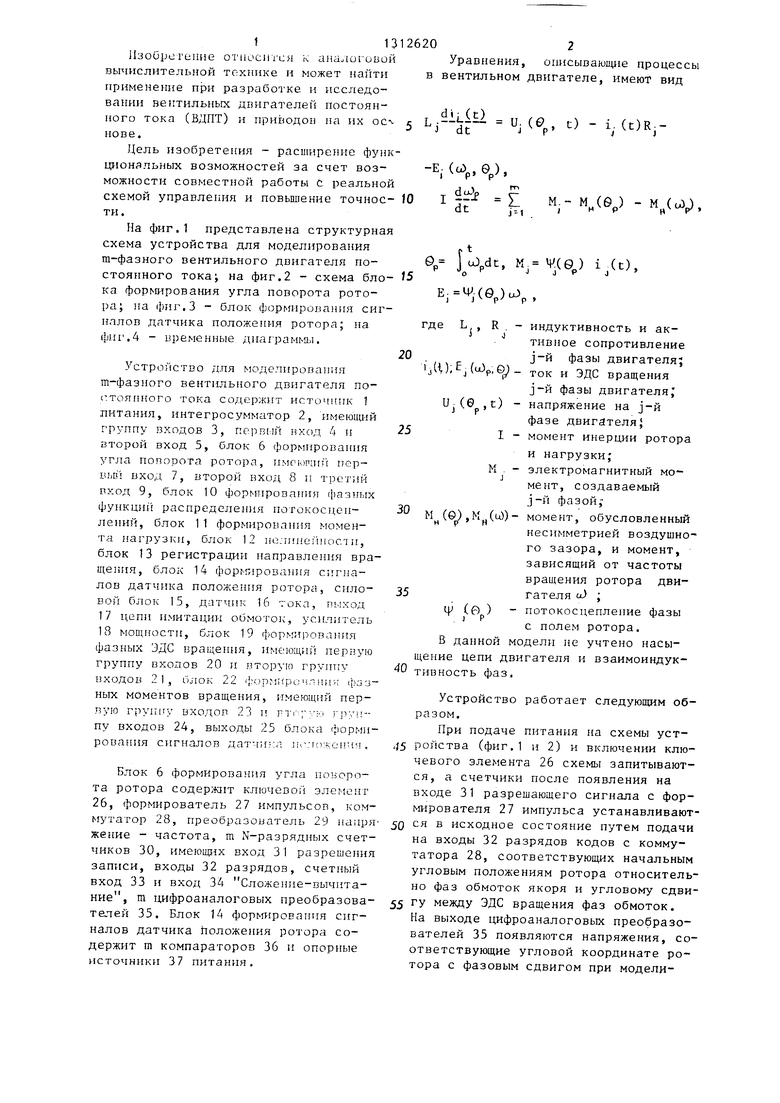
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Устройство для калибровки вентильного электродвигателя | 1985 |
|
SU1358060A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| Устройство для калибровки вентильного электродвигателя | 1987 |
|
SU1417155A1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
Изобретение относится к аналоговой вычислительной технике и может найти применение при разработке и исследовании вентильных двигателей постоянного тока и приводов на его основе. Цель изобретения - расширение функциональных возможностей за счет возможности совместной работы с реальной схемой управления и повышение точности. Дпя этого в устройство введены блок формирования сигналов датчика положения ротора, силовой блок, содержащий m цепей имитации обмоток, каждая из которых состоит из последовательно соединенных датчика тока, индуктивности и токоза- дающего резистора, m усилителей мощности, блок регистрации направления вращения и блок нелинейности. Устройство позволяет воспроизводить пуск двигателя, установившийся режим и реверс. 1 з.п. ф-лы, 4 ил. (Л С
Фиг.З
выl u
V. /ffff 6шЮ
vy%;
I
t lKu ii 10
f(ft/xf9
Utet,m9 itSp
Фut
Составитель И.Дубинина Редактор С.Пекарь Техред Л.Олейник
Заказ 1973/50 Тираж 673Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое гфедприятие, г. Ужгород, ул. Проектная,4
Корректор С,Черни
| Дунаевский С.Я | |||
| и др | |||
| Моделирование элементов электромеханических систем | |||
| - М.: Энергия, 1971, с | |||
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1980 |
|
SU1035618A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
