1
Изобретение относится к электротехнике, в частности к регулируемому электроприводу, и может быть использовано для быстродействующего регулирования момента,, скорости и положения рабочих органов машин и механизмов, оснащенных асинхронным электроприводом, который содержит инвертор, асинхронный двигатель и датчик скорости, например в промьш- ленных роботах и станках с числовым программным управлением.
Цель изобретения - повышение бысродействия путем регулирования мгновенной фазы тока статора и фазового гла между током статора и потоко- сцеплением ротора.
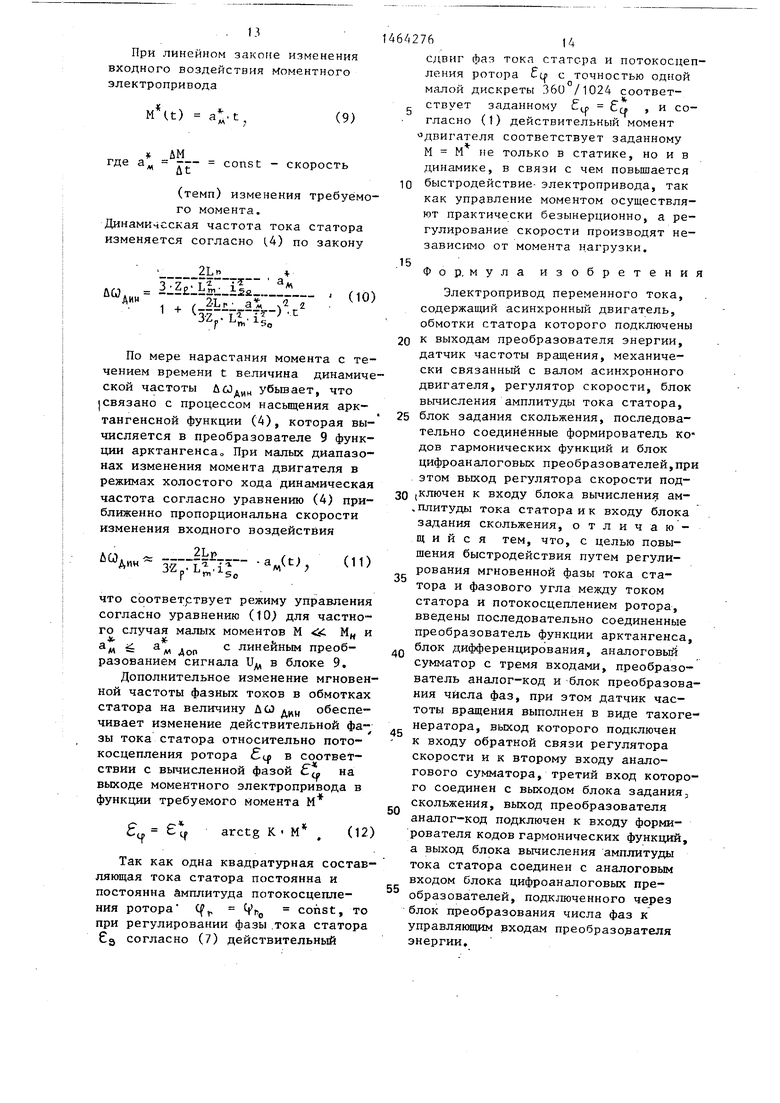
На фиг.1 представлена функционалная схема электропривода переменного тока; на фиг.2 - векторная диаграмма асинхронного двигателя.
Электропривод содержит асинхронный двигатель 1, обмотки статора которого подключены к выходам преобразователя 2 энергии, датчик 3 частоты вращения, механически связанный совалом асинхронного двигателя 1, регулятор 4 скорости, блок 5 вычисления амплитуды тока статора, блок 6 задания скольжения, последователь- но соединенные формирователь 7 кодов гармонических функций и блок 8 цифроаналоговых преобразователей, при этом выход регулятора 4 скорости подключен к входу -блока 5 вычис-
0
5
0
5
ления амплитуды тока статора и к входу блока 6 задания скольжения.
В асинхронный электропривод введены последовательно соединенные преобразователь 9 функции арктангенса, блок 10 дифференцирования, аналоговый сумматор 11 с тремя входами,пре- образователь 12 аналог-код и блок 13 преобразования числа фаз. При этом датчик 3 частоты вращения на валу асинхронного двигателя 1 выполнен в виде тахогенератора, выход которого подключен к входу обратной связи регулятора 4 скорости и к второму входу аналогового сумматора 11, третий вход которого соединен с выходом блока 6 задания скольжения. Выход преобразователя 12 аналог-код подключен к входу формирователя 7 кодов гармонических функций, а выход блока 5 вычисления амплитуды тока статора соединен с аналоговым входом блока 8 цифроаналоговых преобразователей, подключенного через блок 13 преобразования числа фаз к управляющим входам преобразователя 2 энергии.
Преобразователь 2 энергии выполнен в виде регулируемого источника тока, содержащего быстродействующий импульсный инвертор 14, датчики 15 - 17 мгновенных фазных токов статора и релейные регуляторы 18-20 мгновенных фазньк токов статора, под- . ключенные выходами к управляющим входам быстродействующего импульсного инвертора 14. Первые входы релейных регуляторов 18-20 мгновенных фазных токов статора образуют соответствующие управляющие входы преобразователя 2 энергии, а вторые входы - подключены к выходам соответствующих датчиков 15-17 мгновенных фазных токов статора.
Регулятор 4 скорости выполнен в виде пропорционально-интегрального регулятора.
Блок 6 задания скольжения,преобразователь 9 функции арктангенса, блок 10 дифференцирования и аналоговый сумматор 11 образуют по существу аналоговый блок 21 вычисления частоты тока статора. Блок 21,пре- -образователь 12 аналог-код, формирователь 7 кодов гармонических функций, блок 8 цифроаналоговых прег- образователей и блок 13 преобразования числа фаз образуют по существу аналого-цифроаналоговый преобразователь 22.
При отсутствии напряжения на входе и выходе пропорционально-интег- : рального регулятора 4 скорости на вход блока 5 вычисления амплитуды тока статора подают постоянное напряжение, которое задает требуемую постоянную амплитуду потокосцепления ротора ( . Так как требуемый момент М , пропорциональный выходному напряжению пропорционально-интегрального регулятора 4 скорости, равен нулю, то и напряжение на выходе аналогового блока 21 вычисления частоты тока статора равно нулю.
При этом кодовая последовательность импульсов с выхода преобразователя 12 аналог-код не поступает на вход блока 7, в результате чего постоянные программируемые запоминающие элементы в формирователе 7 кодов гармонических функций находятся в произвольной начальной фазе дискретных выборок двух синусоидальных функций, сдвинутых по фазе, на 120°. Выборки синусоидальных функций на полном периоде предварительно программируются, например, с дис- . кретой, равной 1/256 части периода, или с дискретой 1/1024 части периода.
Начальные выборки двух синусоидальных функций подают на цифровые входы блока 8 цифроаналоговых преобразователей, с помощью которых
10
15
20
производится умножение дискретных выборок синусоидальных функций на аналоговое напряжение, поступающее с выхода блока 5 вычисления амплитуды тока -статора. Так как напряжение на выходе блока 5 постоянно, а дискретные выборки не изменяются, то на двух выходах блока 8 образуются постоянные напряжения, которые преобразуются с помощью блока 13, на трех выходах которого образуются постоянные разнополярные напряжения, причем сумма трех напряжений равна нулю.
Постоянные модулирующие напряжения с выхода блока 13 поступают на задающие входы трех релейных регуляторов 18-20 мгновенных фазных токов, в результате чего на одном из каждых двух выходов указанных регуляторов образуется импульс, который подается на один из двух управляющих входов фазы быстродействующего инвертора 14. Каждая из трех фаз это- 25 го инвертора содержит два последовательно соединенных силовых ключа,например транзисторных, один из которых отпирается управляющим импульсом с вькода, соответствующего данной фазе регулятора 18-20 мгновенного фазного тока статора.
Через открытые силовые ключи в каждой из трех фаз импульсного инвертора 14 и через датчики 15-17 мгновенных фазных токов статора обмотки статора асинхронного двигателя 1 подключаются к силовому постоянному напряжению, приложенному на силовом входе быстродействующего импульсного инвертора 14. В результате этогр возникает фазный ток, направление которого в каждой фазе двигателя определяется в зависимости от состояния силовых ключей в фазе и полярности +, - силового постоянного напряжения. Напряжения с выходов датчиков 15-17 мгновенных фазных токов статора, пропорциональные действительному фазному току, подают на вторые входы трех линейных регуляторов 18-20 мгновенных фазных токов статора, причем полярность этих напряжений противоположна полярности модулирующих напряжений, поступающих в соответствующей фазе на задающие входы релейных регуляторов.
В результате сравнения заданного модулирующего напряжения и напря30
35
40
45
50
55
5
жения отрицательной обратной периодического переключения релейных регуляторов 18-20 мгновенных фазных токов статора действительньш мгновенный фазный ток на выходе быстродействующего импульсного инвертора 14 соответствует заданному модлирующему напряжению мгновенного фазного тока с точностью пульсадий на периоде тактирования релейных регуляторов. В связи с этим фазные токи статора асинхронного двигателя 1 постоянны, сумма их в трех фазах равна нулю. В асинхронном двигателе возбуждается постоянное магнитное поле и постоянное потокосцепление ротора, величина которого соответствует заданному напряжению Ц р .. fto.
Так как отсутствует сдвиг фазовго угла тока статора относительно потокосцепления ротора, асинхронный двигатель 1 не развивает момент т.е. М М О, ротор неподвижен, напряжение на выходе датчика 3 скорости равно нулю.
Динамический режим электропривод возникает при приложении возмущающего воздействия со стороны управляющего входа со пропорционально-интегрального регулятора 4 скорости либо со стороны нагрузки приложением внешнего момента к вапу асинхронного двигателя 1.
При приложении возмущающего действия, на выходе пропорционально-интегрального регулятора 4 скорости образуются две составляющие напряжения, соответствую1цие двум составляю- щим требуемого момента, а именно: одна составляющая требуемого момен та определяется пропорциональной частью пропорционально-интегрального регулятора 4 скорости, вторая - определяется его интегральной частью и нарастает с течением времени. В результате изменения во времени требуемого момента увеличивается напряжение задания мгновенной ампли- туды тока статора на выходе блока 5, возникает нара ающее напряжение на входах блоков 6 и 9.
Изменение требуемого момента в функции времени приводит к появле- нию напряжения на выходе преобразо вателя 9 функции арктангенса, при этом величина этого напряжения определяется его настройкой. Изменение
;б6
1
этого напряжения приводит к пояпле- ник/ напряжения на выходе блока 10 дифференцирования такой величины, что с учетом коэффициентов передачи электропривода по фазе и частоте тока статора его выходное напряжение соответствует скорости изменения фазы тока статора относительно потокосцепления ротора. I
Требуемая фаза тока статора от- носительно потокосцепления ротора вычисляется в арктангенсной зависимости от величины требуемого момента, которая определяется выходным напря- жением пропорционально-интегрального регулятора 4 скорости, а скорость
изменения вычислительной таким образом фазы тока статора относительно потокосцепления ротора вычисляется по производной напряжения задания фазы тока статора относительно потокосцепления ротора, причем постоянная времени блока 10 дифференцирования выбирается в зависимости от коэффициентов-передачи электропривода по фазе и частоте тока статора.
Одновременно с этим на выходе блока 6 задания скольжения появляется напряжение, пропорциональное выходному напряжению пропорционально-интегрального регулятора 4 скорости и определяемое в первый момент времени коэффициентом усиления пропорциональной части. Блок 6, представляющий собой операционный усилитель, имеет постоянный коэффициент передачи, настраиваемый в зависимости от коэффициента передачи электропривода по частоте тока статора таким образом, что его выходное напряжение соответствует заданию угловой скорости вращения вектора потокосцеп- Ленин ротора относительно ротора ДСОу , представляющего собой скольжение потокосцепления ротора относительно ротора.
Выходные напряжения блоков 6 и 10 суммируются аналоговым сумматором 11, при этом в начальный мальй интервал времени при возмущении со стороны управляющего входа СО и неподвижном двигателе 1 выходное напряжение аналогового сумматора 11 равно сумме выходных напряжений блоков .6 и 10.
Напряжение задания частоты тока статора с выхода аналогового сумматора резко возрастает в связи с действием интегральной части пропорционально-интегрального р егулятора 4 скорости и блока 10 дифференцирования, что приводит к появлению импульсов на выходе преобразователя 12 аналог-код и, следовательно, к пере- ключейию и резко возрастающей часто- тр переключения дискретных выборок синусоидальных функций в формирователе 7 кодов гармонических функций.
В результате перемножения воз- растающего выходного напряжения блока 5 вычисления амплитуды тока статора и быстро переключаемых дискретных выборок синусоидальных функций на выходе блока 8 цифроаналоговы преобразователей возникает двухфаз-. мое переменное напряжение, мгновенная фаза koToporo изменяется в соответствии с заданной в блоке 9 фазой с малой дискретой, равной 1/256 час- ти или 1/1024 ча,сти переменного периода, уменьшаемого при возрастании выходного напряжения аналогового сумматора 11. Мгновенная амплитуда двухфазного переменного напряжения нара- стает в соответствии с вычисленной помощью блока 5 амплитудой тока статора.
Двухфазное переменное напряжение преобразуется с помощью блока 13 в симметричную трехфазную систему модулирующих напряжений, сдвинутых на 120, которые подаются на задающие входы релейных регуляторов 18-20 мгновенных фазных токов и отрабатывются на каждой дискрете синусоидальных выборок переключением силовых ключей быстродействующего импульсного инвертора 14, что достигается применением тактирования рассогласования заданного и действительного мгновенного фазного тока статора с помощью рел ейных регуляторов. Выходные фазные токи быстродействующего импульсного инвертора 14 измеряются датчиками 15-17 мгновенных фазных токов статора, с помощью которых осществляются отрицательные обратные связи по мгновенному фазному току.
В результате описанного вьше ре- гулирования быстродействующего импульсного инвертора 14 в фазньгх обмотках асинхронного двигателя 1 протекает переменный ток, мгновенные
5 М о
5
значения фазы, частот. и амп.читу- пы которого соответствуют требуемым мгновенным значениям фазы, частот 1 ,и амплитуды тока статора, заданным пропорционально-интегральным регу-.
лятором 4 скорости с точностью регулирования фазы тока статора, соответствующей одной дискрете выборки синусной функции постоянных программируемых элементов формирователя 7.
Так как с помощью преобразователя 9 функции арктангенса фаза тока статора резко изменяется, то в асинхронном двигателе 1 возникает сдвиг фазы тока статора относительно пото- косцепления ротора, фаза которого не может измениться мгновенно из-за электромагнитной инерции, зависящей от большой постоянной времени, равной постоянной времени роторной цепи Тр. В результате этого возникает момент асинхронного двигателя М,
соответствующий требуемому моменту
5
0
5
0
возникает скорость ротора и напряжение на выходе датчика 3 скорости, которое подается с отрицательным знаком на вход обратной связи пропорционально-интегрального регулятора 4 скорости и с положительным знаком на третий вход аналогового сумматора 11.
Напряжение, пропорциональное сумме двух первых частот, одна из которьЕХ пропорциональна скорости ротора и, следовательно, напряжению с выхода датчика 3 скорости, а другая определяется требуемым моментом М и пропорциональна выходному напряжению 6 задания скольжения, задает частоту потокосцепления ротора Q Cjj . Выходное напряжение блока 10 дифференцирования, пропорциональное скорости изменения фазы тока статора, изменяется при изменении требуемого момента и задает частоту вращения вектора тока статора относительно вектора потокосцепления ротора UQ, ф , которая преобразуется Б. фазу тока статора относительно потокосцепления ротора с помощьу. аналого-цифроаналогрво1 о преобразователя 22. Регулированием фазы тока статора относительно потокосцепления ротора с помощью интегральной части регулятора 4 скорости и аналого- цифроанапогового преобразователя 22 достигается выравнивание действительной скорости ротора с заданной скоростью Сд)
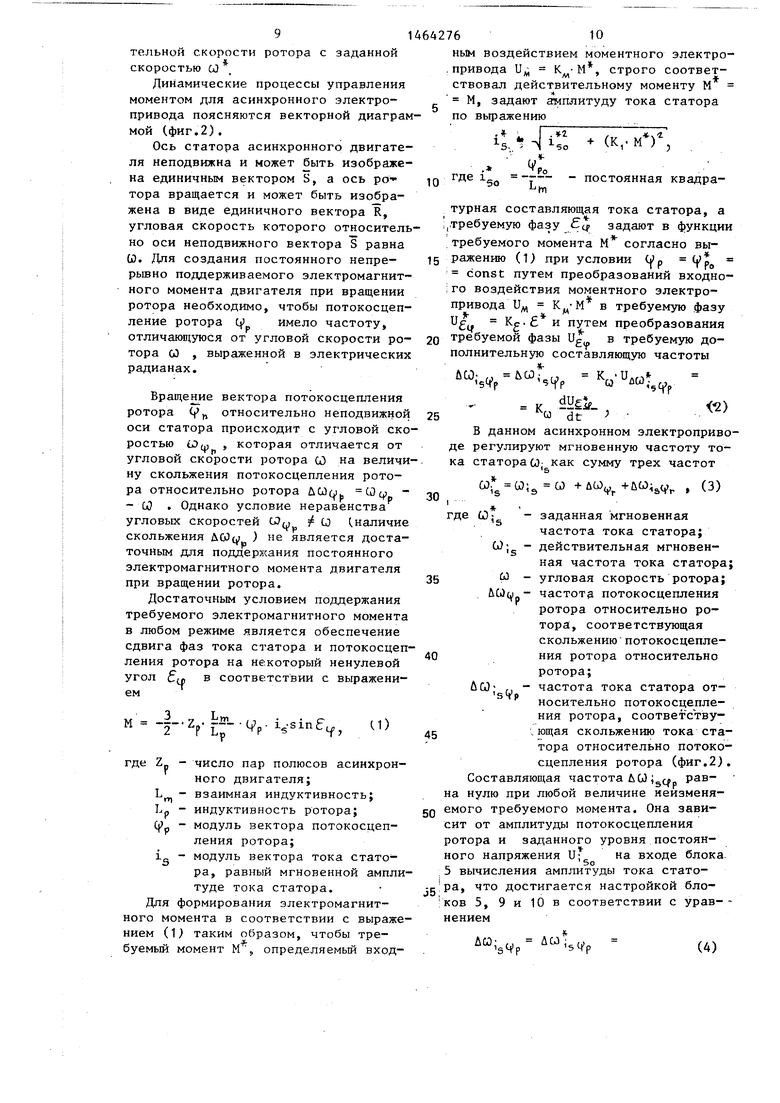
Динамические процессы управления моментом для асинхронного электропривода поясняются векторной диаграммой (фиг.2).
Ось статора асинхронного двигателя неподвижна и может быть изображена единичным вектором S, а ось ро- тора вращается и может быть изображена в виде единичного вектора iR, угловая скорость которого относительно оси неподвижного вектора равна СО. Для создания постоянного непре- рьшно поддерживаемого электромагнитного момента двигателя при вращении ротора необходимо, чтобы потокосцеп- ление ротора С имело частоту, отличающуюся от угловой скорости ротора СО , выраженной в электрических радианах.
Вращение вектора потокосцепления ротора V относительно неподвижной оси статора происходит с угловой скоростью Оф , которая отличается от угловой скорости ротора СО на величину скольжения потокосцепления ротора относительно ротора UCJc., CD ф - - СО . Однако условие неравенства угловых скоростей о Наличие скольжения ДСО() ) не является достаточным для поддержания постоянного электромагнитного момента двигателя при вращении ротора.
Достаточным условием поддержания требуемого электромагнитного момента в любом режиме является обеспечение сдвига фаз тока статора и потокосцепления ротора на некоторый ненулевой угол fq) в соответствии с выражением
М - ---. 7 . ЬиТ- . 11
2 VL: р
i -sine,
где Z - число пар полюсов асинхронного двигателя; L - взаимная индуктивность; LP - индуктивность ротора; CfJp - модуль вектора потокосцепления ротора;
ig - модуль вектора тока статора, равный мгновенной амплитуде тока статора. Для формирования электромагнитного момента в соответствии с выражением (1 таким образом, чтобы требуемый момент М ,, определяемый входным воздействием моментного электропривода U; , строго соответствовал действительному моменту М М, задают амплитуду тока статора по выражению
4.Н
Со - (K,.MV,
Д 50
рр
т
- постоянная квадратурная составляющая тока статора, а ,требуемую фазу задают в функции
требуемого момента М согласно вы- 5 ражению (1) при условии ( (j const путем преобразований входно- ;го воздействия моментного электропривода и, в требуемую фазу Kg. и путем преобразования 0 требуемой фазы Ug в требуемую дополнительную составляющую частоты «ЛЧ-, ЧН.Р
к„-и,„
5
- .г se
- IS. ---л-.
2)
со dt - В данном асинхронном электроприводе регулируют мгновенную частоту тока статора COj как сумму трех частот
30
CO, ) +AW +UC04( , (3)
где СО
5
- заданная мгновенная частота тока статора;
Ujg - действительная мгновенная частота тока статора; 35 - угловая скорость ротора; ЛСОсу - частота потокосцепления ротора относительно ротора, соответствующая скольжению потокосцепле- 40ния ротора относительно
ротора;
ЛЫ; ., - частота тока статора от- носительно потокосцепления ротора, соответству- 45, ющая скольжению тока статора относительно потокосцепления ротора (фиг.2). Составляющая частота йО) ;(« равна нулю при любой величине иеизменя- QQ емого требуемого момента. Она зависит от амплитуды потокосцепления ротора и заданного уровня постоянного напряжения uf на входе блока. 5 вычисления амплитуды тока стато- -g pa, что достигается настройкой бло- ков 5, 9 и 10 в соответствии с урав- нением
u ;3cvp
(4)
1464276
d Urctg,-тг--М )
:. Л
(4)
где Zp - число пар полюсов асинхронного двигателя; (р - требуемая амплитуда по токосцепления ротора, и связанной с ней настройкой блока 6 задания скольжения в соответствии с уравнением
1- -1 М .
( Р 3Z
(5)
Р VJ-o
где RP - активное сопротивление ротора.
Разверткой напряжения U , пропорционального требуемой частоте СО , изменяют фазу тока следующим
«S
образом. Сумму трех напряжений
.
- .
,,
ачг
(6)
преобразуют с помощью преобразователя 12 аналог-код, формирователя 7 ко-Ь дов гармонических функций и блока 8 цифроаналоговых преобразователей, иа выходе,которого образуют два напряжения, фазу, частоту и амплитуту которых изменяют в соответствии с фазой, частотой и амплитудой, заданных на его входах. На выходе блока 13 образуют трёхфазное модулирующее напряжение, задающее требуемую фазу тока статора
Ч
0
12
. - фазовый угол вектора то- ка статора относительно потокосцёпления ротора. Дискрета задания фазовых углов (,8) определяется разрядностью кодов блоков 7 и 8 и достигает малой величины 360°/1024.
Динамическую составляющую фазы тока статора образуют при из- -менении требуемого момента
дм.
м
где
KM
коэффициент передачи -мо- ментного электропривода по мЬменту;
М1м - приращение входного воздействия моментного электропривода, равного приращению напряжения на выходе пропорционально-интегрального регулятора 4 скорости. Таким образом, мгновенные фазные токи формируют путем изменения и
сдвига фазы тока статора относительно потокосцёпления ротора в зависимости от составляющей частоты йСО;,
При управлении фазой тока стато- ра по уравнению (8) формируют отдельный канал управления мгновенной частотой тока статора, который действует лшпь при изменении входного воздействия в зависимости от скоро
сти изменения входного воздействия
аТ
a(t)
dM 5Г 

Изобретение относится к электротехнике и может быть использовано для регулирования момента скорости и положения рабочих органов машин и механизмов. Целью изобретения является повьшение быстродействия/ Электропривод переменного тока содержит асинхронный двигатель (АД) 1, обмотки статора которого подключены к выходам преобразователя 2 энергии (ПЭ). ПЭ 2 составлен из быстродействующего импульсного инвертора (БИИ) 14, датчиков 15-17, включенных в выходные цепи БИИ 14, и релейных регуляторов (РР) 18-20. Вы
el j (0;Vt) dt
t,
в соответствии с диаграммой на фиг.2, Далее получают -tz
Я Г с« с е
(OU) uU(, (t) +
ti
(7)
т.е. фазу тока статора изменяют как сумму трех фазовьк углов
f,- е
г
-tf
(8)
о
- угол между осью ротора К
и осью статора S; - фазовый угол вектора потокосцёпления ротора OJ- носительно оси ротора R;
в связи с чем составляющая частоты 40 тока статора, формируемая на выходе блока 10 дифференцирования, является динамической частотой и определяется как скорость изменения фазового сдвига фазного тока при изме- 45 нении входного воздействия, а мгновенная частота тока статора определяется как скорость изменения фазы мгновенного фазного тока.
Для инвариантного управления моментом динамическая частота
50
UQ
АЙН
dEt dt
согласно уравнению (4 определяется характером изменения входного воздействия, например параметрами определенного стандартного воздей- ствия - линейного или гармонического.
.13
При линейном заког{е изменения входного воздействия моментного электропривода
) a,t
(9)
йМ
м д const - скорость
(темп) изменения требуемого момента.
Динамическая частота тока статора изменяется согласно (.4) по закону
2Ln
2
-гПИг: ;г
f 5io
(10)
По мере нарастания момента с течением времени t величина динамической частоты йСОд„н убьшает, что Связано с процессом насыщения арк- тангенсной функции (4), которая вы- числяется в преобразователе 9 функции арктангенса При малых диапазонах изменения момента двигателя в режимах холостого хода динамическая частота согласно уравнению (4) приближенно пропорциональна скорости изменения входного воздействия
(
(11)
что соответртвует режиму управления согласно уравнению (10) для частного случая малых моментов М ic. М„ и
Л J/П
м а j с линейным преобразованием сигнала U, в блоке 9.
Дополнительное изменение мгновенной частоты фазных токов в обмотках статора на величину до обеспечивает изменение действительной фазы тока статора относительно пото- косцепления ротора ц в соответствии с вычисленной фазой 6 на выходе моментного электропривода в функции требуемого момента М
Р р Ct
arctg К М
(12)
Так как одна квадратурная составляющая тока статора постоянна и постоянна амплитуда потокосцепле- ния ротора const, то при регулировании фазы ,тока статора ЕЭ согласно (7) действительный
6427614
сдвиг фаз тока статора и потокосцеп- ления ротора ц| с точностью одной малой дискреты 360°/1024 соответ- g ствует заданному i| , и согласно (1) действительный момент двигaтeля соответствует заданному М М не только в статике, но и в динамике, в связи с чем повьшается 10 быстродействие- электропривода, так как управление моментом осуществляют практически безынерционно, а регулирование скорости производят не- 3aBHCiiMo от момента нагрузки.
15
Фор. мула изобретения
Электропривод переменного тока, содержащий асинхронный двигатель, обмотки статора которого подключены 20 к выходам преобразователя энергии, датчик частоты вращения, механически связанный с валом асинхронного двигателя, регулятор скорости, блок вычисления амплитуды тока статора, 25 блок задания скольжения, последовательно соединённые формироватедь кодов гармонических функций и блок цифроаналоговых преобразователей,при этом выход регулятора скорости под- 30 (Ключен к входу блока вычисления ам- .плитуды тока статора и к входу блока задания скольжения, отличаю - щ и и с я тем, что, с целью повышения быстродействия путем регулирования мгновенной фазы тока статора и фазового угла между током статора и потокосцеплением ротора, введены последовательно соединенные преобразователь функции арктангенса, Q блок дифференцирования, аналоговый сумматор с тремя входами, преобразователь аналог-код и блок преобразования числа фаз, при этом датчик частоты вращения выполнен в виде тахоге- нератора, выход которого подключен к входу обратной связи регулятора скорости и к второму входу аналогового сумматора, третий вход которого соединен с выходом блока задания, скольжения, выход преобразователя аналог-код подключен к входу формирователя кодов гармонических функций, а выход блока вычисления амплитуды тока статора соединен с аналоговым входом блока цифроаналоговых преобразователей, подключенного через блок преобразования числа фаз к управляющим входам преобразоэателя энергии.
35
45
0
| Электропривод | 1979 |
|
SU942230A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
