Изобретение относится к системам автоматического управления, предназ наченным для управления автоматизированными электроприводами постоянного тока и может быть использовано в системах подач металлорежущих станков с устройством числового про граммного управления, . Известна самонастраивающаяся система регулирования скорости, содер жащая задатчик интенсивности, первы второй, третий сумматор, формирователь сигнала управления, электродви гатель, датчик скорости, эталонную модель электродвигателя, реле, интегратор, инвертор, инерционное зве но и . в данной самонастраивающейся системе регулирования скорости динами ческие свойства существенно занижены за счет того, что формирователь имеет определенное запаздывание, А компенсирующий сигнал при несоот. аетствии динамической характеристики двигателя заданной динамической характеристики подается на вход фор мирователя. Известна также система регулирования, содержащая последовательно соединенные задатчик скорости, первый сумматор , регулятор скорости , второй сумматор, регулятор тока, преобразователь, электродвигатель, датчик скорости, датчик тока, этало ную модель, интегродифференцирующее звено и блок компенсации нагрузки 2 Недостатком известной системы является то, что ее динамические свойства занижены за счет того, что в компенсирующем сигнале не учитывается характер динамической характеристики электродвигателя, а, имен но есть несоответствие динамической характеристики электродвигателя и его заданной динамической характери тики. Наиболее близкой по технической .суцднрсти к предлагаемой является наст рЪивающая система регулирования скор ти, содержащая первый сравнивающий элемент, дифференциатор и усилитель с регулируемым усилением, выпрямитель и последовательно соединенные задатчик скорости, второй сравнивающий элемент, регулирующее устройство и объект, подключенный выходом ко второму входу второго сравнивающего элемента, первый вход которого соединен со входом модели системы з . Недостатком известной системы служит относительно низкая точность и сложность ее структуры, что снижа ет надежность работы системы. Дель изобретения - повышение надежности системы. Поставленная цель достигается тем, чт(5 в системе первый сравнивающий элемент подключен первым входом к модели системы, вторым входом к выходу объекта, а выходом - ко входу выпрямителя, выход которого подключен к первому входу усилителя с регулируемым усилением, соединенного выходом со вторым входом регулирующего устройства; а вторым входом с выходом дифференциатора, подключенного входом к выходу задатчика скорости. На чертеже изображена функциональная- схема самонастраивающейся систе-мы регулирования скорости. Самонастраивающаяся система регулирования скорости содержит защатчик 1 скорости, первый сумматор 2, (регулятор-3, скорости, второй сумматор 4, регулятор 5 тока, тиристорный преобразователь 6, электродвигатель 7, датчик 8 скорости, датчик 9 тока с шунтом 10, эталонную модель 11, третий сумматор 12, дифференцирую1цее звено 13, усилитель 14 с переменным коэффициентом, выпрямитель 15, регулирующее устройство 16 и объект 17. Самонастраивающаяся системе регудирования скорости работает следукяцим образом. Последовательное .соединение задатчика 1 интенсивности первого сумматора 2, регулятора 3 скорости, второго сумматора 4, регулятора 5 тока, тиристорного преобразователя 6, ; электродвигателя 7, датчика 8 скорости, датчика 9 тока с шунтом 10 образуют двухконтурную систему с подчиненным регулированием параметров, В самонастраивающейся системе регулирования скорости применен блок самонастройки, включакяяий в себя эталонную модель 11 и третий сумматор 12, дифференцирующее звено 13, усилитель с переменным коэффициентом усиления 14 и выпрямитель 15. Вход эталонной модели 11 подключен к выходу задатчика 1 интенсивности и моделирует переходную характеристику в системе регулирования .скорости (скорость вращения электродвигателя). Определение ошибки регулирования осуществляется на третьем сумматоре 12, на входы которого поступают сигналы с выхода эталонной модели 11 и с выхода датчика 8 скорости. регулирования с выхода третьего.сумматора 12 подается на выпрямитель 15, предназначенный для получения модуля ошибки регулирования. Выходной сигнал выпрямителя 15 поступает на управляющий вход усилителя с переменным коэффициентом усиления 14. С помощью дифференцирующего звена 13 осуществляется получение второй производной выходного сигнала задатчика 1 скорости, причем йройзводный сигнал задатчика 1 скорости через усилитель 14 поступает на второй
сумматор 4, как положительная обратная связь. Регулирование величины производной, поступающей на вход второго сумматора 4 через усилитель 14 производится в функции ошибок по скорости. При малых ошибках регулирования, когда динамическая характеристика системы регулирования скорости (выходной сигнал датчика скорости 8) соответствует заданной динамической характеристике (на выходе эталонной модели 11), ошибка на выходе третьего сумматора 12 близка к нулю, выходной сигнал выпрмителя 15 равен нулю и коэффициент усиления усили.теля 14 близок к нулю При этом производная, вводимая дифференцирующим звеном 13 на второй сумматор 4, равна нулю и контур самонастройки не влияет на работу системы ре ГУ ли ров а,ни я скорости. При несоответствии заданной динамической характеристики системы (сигнал на выходе эталонной модели 11) и динамической характеристики системы (сигнал на выходе датчика 8 скорос(Ти) появляется ошибка регулирования на выходе третьего сумматора 12. Этот сигнал поступает на вход выпрямителя 1 который, выходным сигналом увеличивает коэффициенты усиления усилителя 14. При этом возрастает и величинзг сигнала производной от задающего сигнала, получаемого дифференцирующим звеном 13 и увеличенный сигнал поступает на вход второго сумматора 4. При этом происходит форсировка динамических процессов в системе регулирования скорости и улучшение динамических свойств по управляющему воздей0ствию..
, Предлагаемая самонастраивающаяся система регулирования позволяет повысить динамические свойства по управляющему воздействию, а именно расширить полосу пропускания системы
5 в два раза при малых амплитудах задающего сигнала за счет введения производной по заданию на вход регулятора тока, при учете .характера динамической характеристики системы.
0
Применение предлагаемой самонастраивающейся системы регулирования скорости в металлорежущих станках с ЧПУ в качестве электропривода подачи позволяет повысить производи5тельность труда за счет улучшения динамических свойств, т.е. сокращения времени переходных процессов в системе.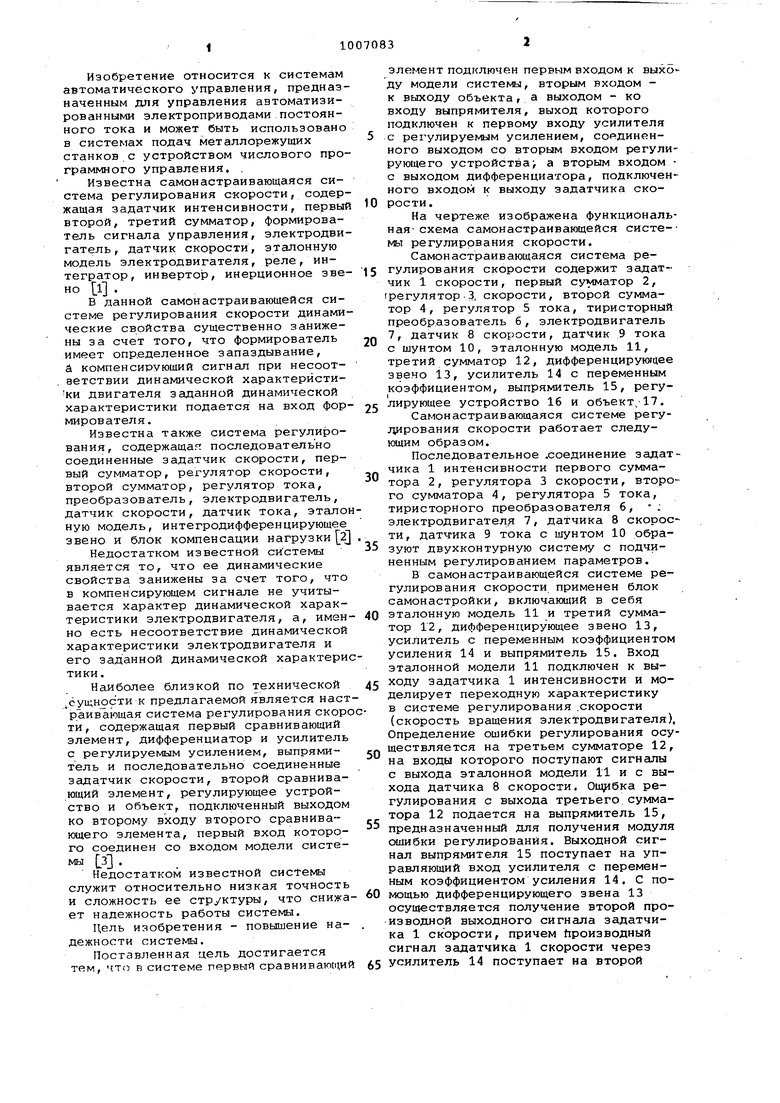

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система регулирования скорости | 1984 |
|
SU1180844A2 |
| Самонастраивающаяся система регулирования скорости | 1987 |
|
SU1462243A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод | 2019 |
|
RU2713185C1 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ КОТЛА С ПЫЛЕСИСТЕМАМИ ПРЯМОГО ВДУВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419746C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ, содержащая первый сравнивающий элемент, дифференциатор и усилитель с регулируемым усилением, выпрямитель и последовательно соединенные эадатчик скорости, второй сравнивающий элемент, регулирующее устройство и объект, подключенный выходом ко второму входу второго сравнивающего элемента, первый вход которого соединен со входом модели системы, отличающаяся тем, что, с целью повышения точности и надежности системы, в ней первый сравнивающий элемент подключен первым входом к выходу модели системы, вторым входом - к выходу объекта, а выходом - ко входу выпрямителя, выход которого подключен к первому входу усилителя с-регулируекым усиV лением, соединенного выходом со вторым входом регулирующего устройства, а вторым входом - с выходом дифференциатора, подключенного входом к выходу эадатчика скорости. 00 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Самонастраивающаяся система регулирования скорости | 1974 |
|
SU585475A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Костюк В | |||
| И | |||
| Самонастраивающиеся следящие системы | |||
| Киев, Техника, 1966, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
