Область техники, к которой относится изобретение.
Изобретение относится к ракетной технике, в частности к электрическим рулевым приводам и может быть использовано, например, в блоках электрических рулевых приводов управляемых ракет.
Уровень техники.
Известен следящий электропривод [патент РФ №№2216707, 20.11.2003], содержащий последовательно соединенные сумматор, корректирующее устройство, усилитель мощности, электродвигатель, потенциометр обратной связи. Главная обратная связь не охватывает выходное звено электропривода. Данный привод обладает недостаточно высоким быстродействием. Электропривод работает в автоколебательном режиме, параметры которого определяются корректирующим устройством, в результате чего создаются вибрации частотой 90-150 Гц, что негативно сказывается на рабочих характеристиках летательного аппарата.
Известен рулевой электропривод [патент РФ №2285227, 10.10.2006], содержащий электродвигатель, редуктор, выход которого связан с рулями управления и потенциометром обратной связи. В блоке электроники расположены формирователь команд, усилитель мощности и корректирующая цепь обратной связи. Электропривод имеет недостаточно высокие динамические характеристики. Фазовое запаздывание для линейной системы второго порядка на частоте пропускания составит порядка 90 град, что приводит к значительным трудностям при управлении летательным аппаратом.
Известен следящий электрический рулевой привод [патент Украины №73793, 15.09.2005], содержащий первый сумматор, первый фильтр нижних частот, усилитель мощности, исполнительный двигатель, редуктор, датчик обратной связи, второй сумматор, ограничитель, дифференцирующее устройство, второй фильтр нижних частот. Использование канала управления с эталонной моделью позволяет компенсировать небольшие параметрические возмущения следящего электропривода. Однако электропривод обладает недостаточно большой полосой пропускания по углу (около 15 Гц), а использование в качестве эталонной модели апериодического звена первого порядка, обеспечивающего малое фазовое запаздывание, не позволяет получить резкий спад амплитудно-частотной характеристики на частотах выше полосы пропускания, что приводит к низкой помехоустойчивости.
Наиболее близким к изобретению является следящий рулевой электропривод [патент РФ №2399017, 10.09.2010], содержащий первый, второй, третий четвертый и пятый сумматоры, первое устройство деления, регулятор скорости, ограничитель, усилитель мощности, исполнительный двигатель, редуктор, датчик обратной связи, датчик скорости, блок модели двигателя, которые образуют основной контур регулирования следящего привода. Привод также содержит первый и второй фильтры нижних частот, блок эталонной модели, первое и второе устройство сравнения, первое и второе дифференцирующие устройства, которые формируют сигналы коррекции, вводимые в основной контур регулирования следящего привода. Кроме этого, электропривод содержит устройство формирования сигнала перестройки коэффициента усиления основного контура регулирования, которое включает третий, четвертый, пятый и шестой фильтры нижних частот, третье и четвертое дифференцирующие устройства, первое и второе устройства выделения модуля, первое и второе логические устройства, функциональный преобразователь, причем третий фильтр нижних частот выполнен с широкой полосой пропускания, а пятый фильтр нижних частот - с узкой полосой пропускания. На выходе второго устройства деления формируется сигнал, несущий информацию о частоте задающего воздействия электропривода. Данный сигнал, пройдя через функциональный преобразователь, подается на первое устройство деления для коррекции коэффициента усиления.
Электропривод обеспечивает большую полосу пропускания (20-25 Гц), малое фазовое запаздывание (не более 45 град.) и подавление амплитудно-частотной характеристики (далее - АЧХ) на частотах свыше полосы пропускания.
Однако следует отметить, что механический редуктор, входящий в состав электропривода, имеет разброс параметров (например, величин люфта и характеристик момента сопротивления). В общем случае момент сопротивления механической передачи является функцией углового положения и скорости, при этом момент трения в состоянии покоя и при движении могут существенно отличаться. Это приводит к тому, что при позиционировании в некоторых точках диапазона изменения угла поворота выходного вала в электроприводе возникают автоколебания.
Кроме того, фазоопережающий сигнал коррекции на выходе второго дифференцирующего устройства, формирующий частотные характеристики в среднем частотном диапазоне, осуществляет излишний подъем АЧХ на частотах за пределами полосы пропускания, в то время как, исходя из требований помехозащищенности, желательно иметь более резкое подавление АЧХ на этих частотах. На низких частотах фазоопережающий сигнал коррекции имеет скачкообразный характер, вызванный цифровой реализацией с квантованием по уровню и по времени, что приводит к ухудшению плавности движения выходного вала электропривода.
Раскрытие сущности изобретения.
Заявленное изобретение направлено на решение технической проблемы, заключающейся в том, что при позиционировании в некоторых точках диапазона изменения угла поворота выходного вала возникают автоколебания, ухудшающие параметры электропривода. Кроме того, на низких частотах наблюдается недостаточная плавность движения выходного вала и недостаточно эффективное подавление АЧХ за пределами полосы пропускания.
Техническим результатом, на достижение которого направлено изобретение, является устранение автоколебаний в электроприводе, а также улучшение плавности движения при отработке низкочастотных сигналов и более эффективное подавление АЧХ за пределами полосы пропускания.
Технический результат достигается тем, что следящий электрический рулевой привод содержит первый сумматор, на первый вход которого подается сигнал задания, последовательно соединенные первый фильтр нижних частот, блок эталонной модели, первое устройство сравнения, последовательно соединенные усилитель мощности, исполнительный двигатель, редуктор и датчик обратной связи, выход которого подключен ко вторым входам первого сумматора и первого устройства сравнения, последовательно соединенные первое дифференцирующее устройство, второе устройство сравнения, второй сумматор, первый ограничитель, выход которого подключен к третьему входу первого сумматора, последовательно соединенные второй фильтр нижних частот и второе дифференцирующее устройство, последовательно соединенные четвертый сумматор, регулятор скорости, второй ограничитель, пятый сумматор, блок модели двигателя, шестой сумматор, выход которого подключен ко второму входу пятого сумматора, последовательно соединенные третий сумматор и первое устройство деления, при этом датчик скорости соединен с валом исполнительного двигателя, последовательно соединенные третий фильтр нижних частот, третье дифференцирующее устройство, первое устройство выделения модуля, четвертый фильтр нижних частот, первое логическое устройство, выход которого подключен к входу делителя первого устройства деления, последовательно соединенные пятый фильтр нижних частот, четвертое дифференцирующее устройство, второе устройство выделения модуля, шестой фильтр нижних частот, второе логическое устройство, последовательно соединенные второе устройство деления и функциональный преобразователь, причем вход делимого второго устройства деления соединен с выходом четвертого фильтра нижних частот, вход делителя второго устройства деления соединен с выходом второго логического устройства, второй вход первого логического устройства соединен с выходом функционального преобразователя, вход первого фильтра нижних частот подключен к первому входу первого сумматора и к входам третьего и пятого фильтров нижних частот, выход первого сумматора подключен к первому входу третьего сумматора, выход которого подключен к входу делимого первого устройства деления, выход датчика скорости подключен ко второму входу шестого сумматора, выход блока эталонной модели соединен с входом первого дифференцирующего устройства, выход которого подключен к входу второго фильтра нижних частот, выход блока модели двигателя подключен ко вторым входам четвертого сумматора и второго устройства сравнения, выход первого устройства сравнения подключен ко второму входу второго сумматора, выход второго ограничителя соединен с входом усилителя мощности.
Третий фильтр нижних частот выполнен с широкой полосой пропускания.
Пятый фильтр нижних частот выполнен с узкой полосой пропускания.
Функциональный преобразователь выполнен с реализацией нарастающей зависимости выходного сигнала от входного с начальным участком, формирующим постоянный уровень выходного сигнала.
Первое логическое устройство выполнено с реализацией блокировки прохождения сигнала с функционального преобразователя при малых уровнях сигнала на выходе четвертого фильтра нижних частот.
Второе логическое устройство выполнено с реализацией исключения режима деления на ноль на втором устройстве деления.
Электропривод дополнительно содержит третье устройство деления, третье, четвертое и пятое логические устройства, причем первый вход третьего логического устройства соединен с выходом первого устройства деления, второй вход третьего логического устройства соединен с выходом пятого логического устройства, первый выход третьего логического устройства подключен к первому входу четвертого сумматора, второй выход третьего логического устройства соединен с входом делимого третьего устройства деления, выход которого соединен с первым входом четвертого сумматора, первый и второй входы пятого логического устройства подключены соответственно к первому и второму входам первого сумматора, выход второго дифференцирующего устройства подключен к первому входу четвертого логического устройства, выход которого соединен со вторым входом третьего сумматора, выход второго устройства деления соединен со вторым входом четвертого логического устройства.
Третье логическое устройство выполнено с реализацией функции подключения сигнала с выхода первого устройства деления к первому входу четвертого сумматора или к входу делимого третьего устройства деления по сигналу с выхода пятого логического устройства.
Третье устройство деления выполнено с реализацией функции деления на постоянный коэффициент.
Четвертое логическое устройство выполнено с реализацией функции отключения выхода второго дифференцирующего устройства от второго входа третьего сумматора при низких частотах входного воздействия и на частотах за пределами полосы пропускания.
Пятое логическое устройство выполнено с реализацией функции формирования интервала времени, с реализацией функции формирования логической единицы на выходе, если в течение заданного интервала времени модуль ошибки электропривода по положению и модуль приращения угла задания за единицу времени меньше заданных постоянных величин модуля ошибки электропривода и модуля приращения угла задания, с реализацией функции формирования логического нуля, если данное условие выполняется в течение интервала времени менее заданного, или модуль ошибки электропривода по положению, или модуль приращения угла задания за единицу времени больше указанных постоянных величин.
Краткое описание чертежей.
Конструкция и принцип работы следящего рулевого электропривода поясняются с помощью чертежей, на которых представлены:
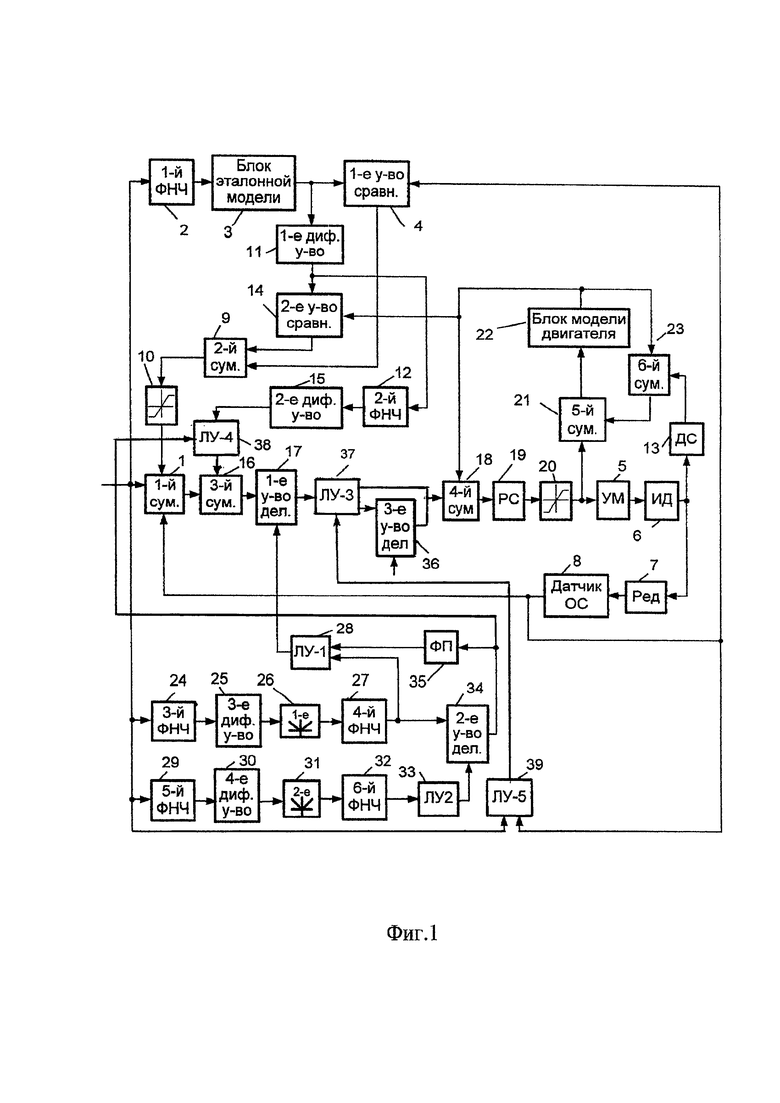
Фиг. 1 - схема следящего электрического рулевого привода;
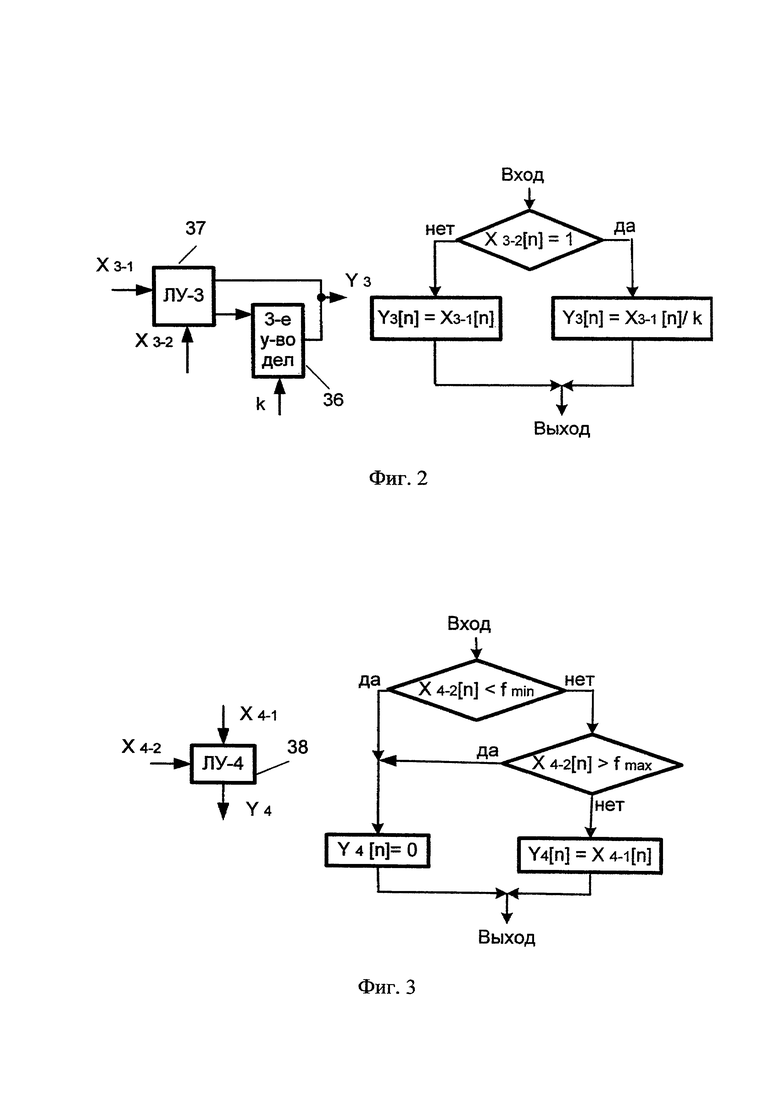
Фиг. 2 - блок-схема алгоритма функционирования третьего логического устройства совместно с третьим устройством деления;
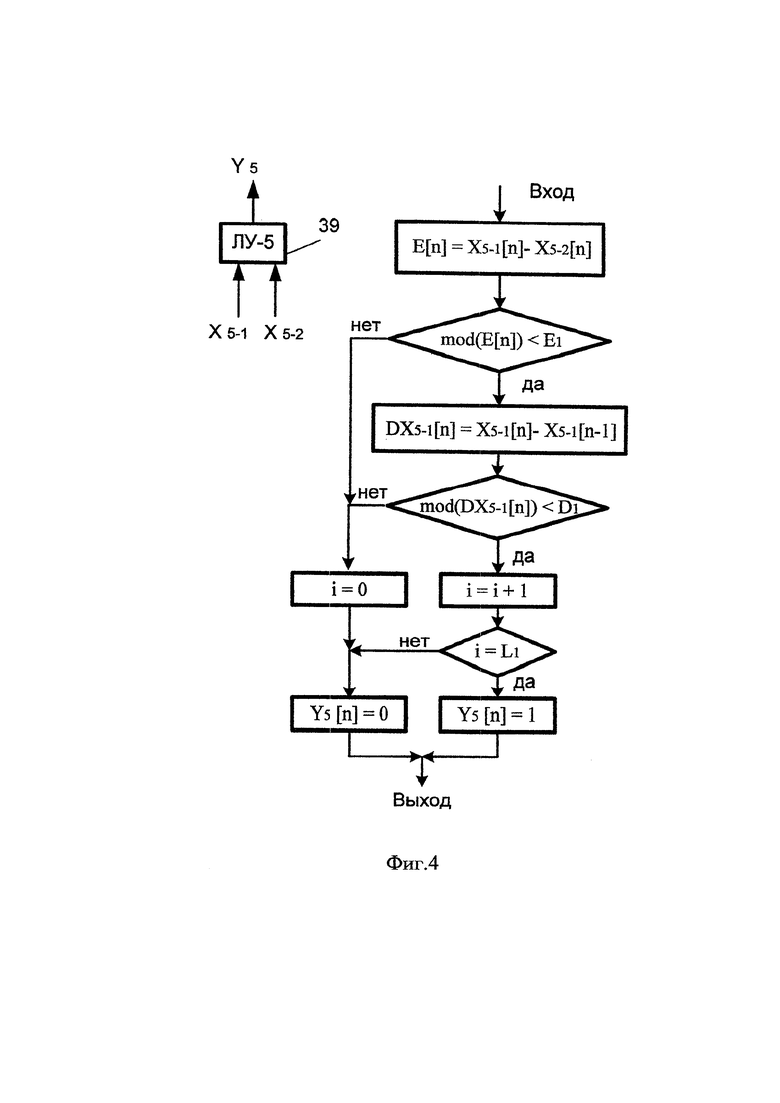
Фиг. 3-блок-схема алгоритма функционирования четвертого логического устройства;
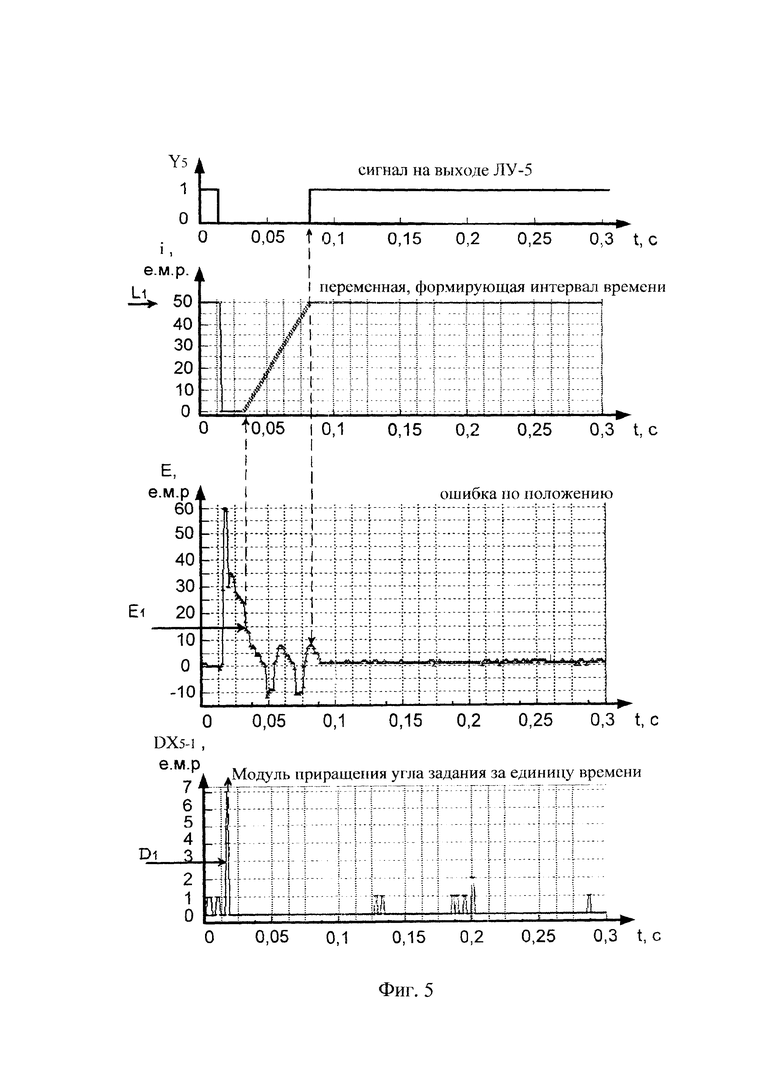
Фиг. 4 - блок-схема алгоритма функционирования пятого логического устройства;
Фиг. 5 - осциллограммы переменных, поясняющих работу пятого логического устройства при отработке скачка угла задания;
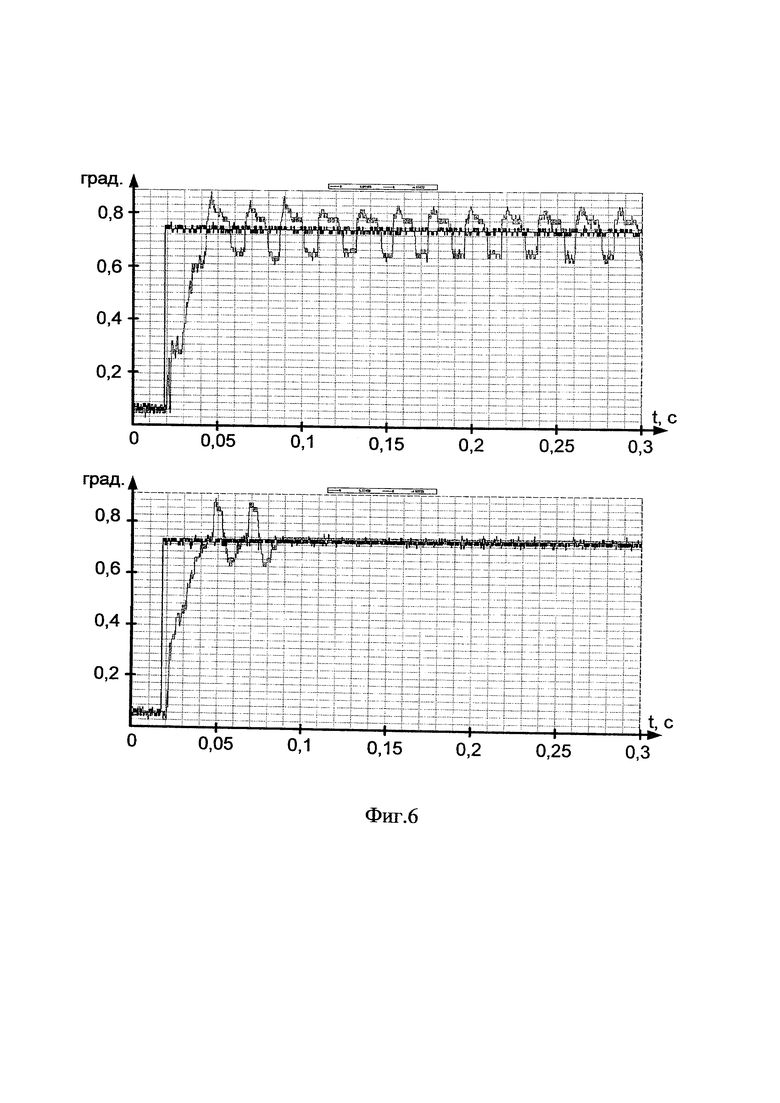
Фиг. 6 - осциллограммы переходных процессов электропривода при отработке скачка угла задания 0,7 град: 6(a) - без дополнительных функциональных элементов; 6(б) - с дополнительными функциональными элементами.
На фигурах чертежей обозначены следующие элементы:
1 - первый сумматор;
2 - первый фильтр нижних частот;
3 - блок эталонной модели;
4 - первое устройство сравнения;
5 - усилитель мощности;
6 - исполнительный двигатель;
7 - редуктор;
8 - датчик обратной связи;
9 - второй сумматор;
10 - первый ограничитель;
11 - первое дифференцирующее устройство;
12 - второй фильтр нижних частот;
13 - датчик скорости;
14 - второе устройство сравнения;
15 - второе дифференцирующее устройство;
16 - третий сумматор;
17 - первое устройство деления;
18 - четвертый сумматор;
19 - регулятор скорости;
20 - второй ограничитель;
21 - пятый сумматор;
22 - блок модели двигателя;
23 - шестой сумматор;
24 - третий фильтр нижних частот;
25 - третье дифференцирующее устройство;
26 - первое устройство выделения модуля;
27 - четвертый фильтр нижних частот;
28 - первое логическое устройство;
29 - пятый фильтр нижних частот;
30 - четвертое дифференцирующее устройство;
31 - второе устройство выделения модуля;
32 - шестой фильтр нижних частот;
33 - второе логическое устройство;
34 - второе устройство деления;
35 - функциональный преобразователь;
36 - третье устройство деления;
37 - третье логическое устройство;
38 - четвертое логическое устройство;
39 - пятое логическое устройство;
В следящем рулевом электрическом приводе функциональные элементы 1, 3, 4, 9-12, 14-39 реализованы с использованием микроконтроллера.
Следящий рулевой электропривод работает следующим образом. На первый вход первого сумматора 1 подается сигнал задания, на второй вход - сигнал, поступающий с датчика 8 обратной связи. Датчик 8 обратной связи может быть реализован, например, в виде кодового датчика или потенциометрического с преобразованием выходного сигнала в цифровой вид. На выходе первого сумматора 1 формируется ошибка по положению, которая отрабатывается основным контуром регулирования следящего электропривода, включающим третий сумматор 16, первое устройство 17 деления, третье логическое устройство 37, третье устройство деления 36, четвертый сумматор 18, регулятор 19 скорости, второй ограничитель 20, усилитель 5 мощности, исполнительный двигатель 6, редуктор 7, датчик 8 обратной связи.
Из-за жестких требований по габаритно-массовым показателям в следящем рулевом электроприводе применяются малогабаритные датчики скорости, обладающие малой крутизной характеристики и большими пульсациями выходного сигнала. Датчик 13 скорости может быть реализован, например, в виде тахогенератора постоянного тока с преобразованием выходного сигнала в цифровой вид. Блок 22 модели двигателя, пятый (21) и шестой (23) сумматоры образуют наблюдатель, вырабатывающий оценку скорости двигателя с существенно меньшей величиной пульсаций, чем сигнал тахогенератора.
Управляющий сигнал одновременно подается с выхода второго ограничителя 20 на наблюдатель и на исполнительный двигатель 6 через усилитель 5 мощности. Второй ограничитель 20 служит для ограничения сигнала, подаваемого на первый вход пятого сумматора 21 в соответствии с характеристикой насыщения по напряжению питания усилителя 5 мощности. Шестой сумматор 23 формирует сигнал ошибки между сигналом оценки скорости, вырабатываемым блоком 22 модели двигателя и сигналом датчика 13 скорости, который подается на второй вход пятого сумматора 21 и образует обратную связь. Глубина этой обратной связи определяет динамику наблюдателя. Сигнал оценки скорости подается на второй вход четвертого сумматора 18, на выходе которого формируется сигнал ошибки по скорости.
Регулятор 19 скорости может быть выполнен с пропорциональным или пропорционально-интегральным законами регулирования.
Функциональные элементы 2-4, 9-11, 14 образуют канал управления с эталонной моделью, который работает следующим образом.
Входной сигнал следящего рулевого электропривода через первый фильтр 2 нижних частот поступает на вход блока 3 эталонной модели. Блок 3 эталонной модели представляет собой фильтр нижних частот, динамические характеристики которого аппроксимируют желаемую динамику электропривода в нижней части диапазона частот. Первое устройство 4 сравнения формирует сигнал разности между сигналом с выхода блока 3 эталонной модели и сигналом об угловом положении с выхода датчика 8 обратной связи.
Первое дифференцирующее устройство 11 формирует сигнал желаемой скорости электропривода, который во втором устройстве 14 сравнения сравнивается с сигналом оценки скорости исполнительного двигателя 6, поступающим с выхода блока 22 модели двигателя.
Сигналы с выходов первого устройства 4 сравнения и второго устройства 14 сравнения несут информацию об отклонении выходного угла следящего рулевого электропривода и скорости исполнительного двигателя от желаемых в нижней части диапазона частот. В результате оба указанных сигнала отклонений поступают на входы второго сумматора 9, где суммируется с определенными весами. Выходной сигнал второго сумматора 9 ограничивается первым ограничителем 10, на выходе которого формируется сигнал коррекции, под воздействием которого динамика электропривода «следует» за динамикой эталонной модели в нижней части частотного диапазона.
Для расширения полосы пропускания электропривода формируется дополнительный фазоопережающий сигнал коррекции с помощью функциональных элементов: первое дифференцирующее устройство 11, второй фильтр 12 нижних частот, второе дифференцирующее устройство 15. Этот сигнал через четвертое логическое устройство 38 поступает на второй вход третьего сумматора 16. Указанный сигнал обеспечивает широкую полосу пропускания электропривода и снижает требования к коэффициенту усиления основного контура регулирования следящего электропривода, что повышает его помехоустойчивость.
Для формирования частотных характеристик в области высоких частот служат функциональные элементы 24-35, образующие устройство коррекции коэффициента усиления основного контура регулирования следящего привода, которое работает следующим образом. Сигнал задания подается на две параллельные ветви, состоящие из последовательно соединенных функциональных элементов 24-27 и 29-32. Третий фильтр 24 нижних частот выполнен с широкой полосой пропускания и незначительно подавляет амплитуду проходящего через него сигнала задания, а пятый фильтр 29 нижних частот - с узкой полосой пропускания, при этом на его выходе формируется сигнал, амплитуда которого уменьшается с увеличением частоты входного воздействия. Третье (25) и четвертое (30) дифференцирующие устройства устраняют влияние постоянной составляющей сигнала задания, первое (26) и второе (31) устройства выделения модуля формируют сигналы, не зависящие от знака входного воздействия, которые сглаживаются четвертым (27) и шестым (32) фильтрами нижних частот и поступают, соответственно, на вход делимого и через второе логическое устройство (33) на вход делителя второго устройства 34 деления.
При малых частотах задающего воздействия сигналы на выходах третьего (24) и пятого фильтров (29) нижних частот имеют практически одинаковую амплитуду, в результате чего на выходе второго устройства 34 деления образуется сигнал, соответствующий низким частотам сигнала задания. При увеличении частоты задающего воздействия, амплитуда на выходе пятого фильтра 29 нижних частот уменьшается. В итоге на выходе второго устройства 34 деления образуется сигнал большей величины, соответствующий увеличенной частоте сигнала задания. При малых сигналах на выходе шестого фильтра 32 нижних частот второе логическое устройство 33 формирует постоянный сигнал на входе делителя второго устройства 34 деления, что исключает ситуацию деления на ноль.
Сигнал с выхода второго устройства 34 деления, несущий информацию о частоте входного воздействия, поступает на вход функционального преобразователя 35. Функциональный преобразователь 35 выполнен с реализацией нарастающей зависимости выходного сигнала от входного с начальным участком, формирующим постоянный минимальный уровень на выходе при малых значениях сигнала, поступающего с второго устройства 34 деления. Например, функциональный преобразователь может быть реализован в виде монотонно нарастающей ступенчатой функции.
Сигнал с выхода функционального преобразователя 35 через первое логическое устройство 28 поступает на вход делителя первого устройства 17 деления, которое позволяет менять общий коэффициент усиления основного контура регулирования. При малых уровнях сигнала на выходе четвертого фильтра 27 нижних частот первое логическое устройство 28 блокирует прохождение сигнала с функционального преобразователя 35, при этом на вход делителя первого устройства 17 деления подается минимальный уровень.
При частотах входного задающего воздействия, не превышающих желаемую полосу пропускания, сигнал на входе делителя минимален (коэффициент деления), коэффициент усиления основного контура регулирования максимален и электропривод обладает максимальными частотными свойствами. При частотах задающего воздействия, находящихся за пределами желаемой полосы пропускания, сигнал на входе делителя увеличивается, общий коэффициент усиления уменьшается, в результате чего увеличивается степень подавления амплитуды входного воздействия за пределами полосы пропускания.
Четвертое логическое устройство 38 функционирует в соответствии с блок-схемой алгоритма, приведенной на фиг. 3. На фиг. 3 обозначено X4-1[n], X4-2[n], Y4-1[n] - сигналы на первом и втором входах и на выходе четвертого логического устройства 38 в текущий такт работы микроконтроллера, fmin и fmax - минимальное и максимальное значение сигналов с выхода второго устройства деления 34, несущие информацию о частоте входного воздействия. Если Х4-2[n] меньше или Х4-2[n] больше fmax то сигнал Y4 на выходе четвертого логического устройства 38 равен нулю, т.е. фазоопережающий сигнал коррекции при низких частотах входного воздействия и на частотах за пределами полосы пропускания отключается. Это позволяет улучшить плавность движения при отработке низкочастотных сигналов, исключив влияние скачкообразного характера сигнала, вызванного цифровой реализацией и осуществить более эффективное подавление АЧХ, уменьшив ее подъем за пределами указанной полосы. Если Х4-2[n] больше fmin и Х4-2[n] меньше fmax, то сигнал Y4[n] равен X4-1[n], т.е. фазоопережающий сигнал подается на второй вход третьего сумматора 16.
Третье логическое устройство 37 и третье устройство 36 деления функционируют в соответствии с блок-схемой алгоритма, приведенной на фиг. 2. На фиг. 2 обозначено Х3-1[n], Х3-2[n] - сигналы на первом и втором входах третьего логического устройства 37, поступающие, соответственно, с выхода первого устройства 17 деления и с выхода пятого логического устройства 39, k - коэффициент деления третьего устройства 36 деления, Y3[n] - сигнал, поступающий на первый вход четвертого сумматора 18. Если на выходе пятого логического устройства 39 сформирован сигнал логического нуля, то Y3[n] равен X3-1[n], т.е. третье логическое устройство 37 подключает сигнал с выхода первого устройства деления 17 непосредственно к входу четвертого сумматора 18, и электропривод работает с настройками, обеспечивающими заданные высокие динамические характеристики. Если на выходе пятого логического устройства 39 сформирован сигнал логической единицы, третье логическое устройство 37 подключает сигнал с выхода первого устройства деления 17 к входу четвертого сумматора 18 через третье устройство 36 деления, осуществляющее деление на постоянный коэффициент к. При этом уменьшается коэффициент усиления основного контура электропривода, в результате чего автоколебания исчезают.
Пятое логическое устройство 39, формирующее сигнал логического нуля или сигнал логической единицы, функционирует в соответствии с блок-схемой алгоритма, приведенной на фиг. 4. На фиг. 4 обозначено X5-1[n], X5-1[n-1] - сигналы задания по угловому положению в текущий и прошлый такт работы микроконтроллера, Х5-2[n], E[n], DX5-1[n], Y5[n] соответственно - сигналы выходного угла, ошибки электропривода по положению, приращения угла задания за единицу времени в текущий такт работы микроконтроллера, сигнал на выходе пятого логического устройства. E1 D1, L1 - константы, определяющие условия логических переключений в алгоритме пятого логического устройства 39, где: E1 - заданная постоянная величина модуля ошибки электропривода по положению; D1 - заданная постоянная величина модуля приращения угла задания; L1 - заданная постоянная величина интервала времени.
Параметры редуктора 7, которые могут привести к автоколебаниям (например, момент сопротивления), имеют достаточно узкий диапазон изменения по угловому положению. Поэтому при отслеживании входного сигнала угловое положение выходного вала непрерывно меняется, параметры редуктора также быстро меняются и автоколебательный режим не возникает. Задачей пятого логического устройства 39 является формирование сигнала логического нуля при работе электропривода в режиме слежения и сигнала логической единицы в режиме позиционирования, когда в некоторых точках диапазона изменения углового положения возникают автоколебания.
Если модуль ошибки электропривода по положению mod(E[n]) или модуль приращения угла задания за единицу времени mod(DX5-1[n]) больше соответствующих констант Е1, D1, то в соответствии с блок-схемой алгоритма на выходе формируется сигнал логического нуля. При этом третье логическое устройство подключает сигнал с выхода первого устройства деления непосредственно к первому входу четвертого сумматора 18, при этом коэффициент усиления основного контура остается высоким, а частотные характеристики электропривода имеют заданные высокие параметры.
Если модуль ошибки электропривода по положению mod(E[n]) и модуль приращения угла задания за единицу времени mod(DX5-1[n]) меньше соответствующих констант E1, D1, то это является условием для формирования на выходе сигнала логической единицы. Однако, для исключения ложных срабатываний из-за воздействия на сигналы X5-1[n], Х5-2[n] помех, в алгоритм пятого логического устройства 39 введена переменная i, которая накапливается в течение определенного числа тактов работы микроконтроллера, и если условия формирования логической единицы, изложенные выше, выполняются в течение времени, заданного константой L1, то на выходе пятого логического устройства формируется логическая единица, которая поступает на второй вход третьего логического устройства, что приводит к уменьшению коэффициента усиления основного контура электропривода и, как следствие, к срыву автоколебаний.
На фиг. 5 приведены осциллограммы переменных, поясняющих работу пятого логического устройства 39 электропривода при отработке скачка угла задания. Осциллограммы получены в результате заполнения массивов цифровых сигналов переменных с последующим выводом на печать. На рисунке обозначено: Y5[n] - сигнал на выходе пятого логического устройства 39, i - переменная, накапливаемая для исключения воздействия помех на сигналы X5-1[n] и Х5-2[n], Е[n] - сигнал ошибки по положению, DX5-1[n] - сигнал приращения угла задания за единицу времени, е.м.р. - единицы младшего разряда двоичного кода. На фиг. 5 показаны уровни констант, определяющие условия логических переключений в алгоритме пятого логического устройства 39.
На фиг. 6(a) представлена осциллограмма переходного процесса электропривода, снятая экспериментально, при отработке скачка угла задания 0,7 град с позиционированием в точке с автоколебаниями без дополнительной коррекции. На выходном валу имеются автоколебания амплитудой 0,1 град, частотой 46 Гц. На фиг. 6(б) приведена осциллограмма переходного процесса при отработке того же скачка угла с введенными дополнительными функциональными элементами и связями между ними. Осциллограмма демонстрирует эффективность дополнительной коррекции: автоколебания выходного вала в установившемся режиме отсутствуют.
С помощью дополнительно введенных элементов при малых величинах ошибки по положению, при условии, если угол задания не меняется в течение заданного интервала времени, осуществляется коррекция коэффициента усиления основного контура привода. В режиме слежения коррекция отключается, и частотные характеристики электропривода имеют заданные высокие параметры.
Таким образом, совокупность существенных признаков, характеризующих заявляемый следящий рулевой электропривод, позволяет устранить автоколебания, возникающие при позиционировании из-за вариации параметров редуктора в функции углового положения, а также улучшить плавность движения при отработке низкочастотных сигналов и осуществить более эффективное подавление АЧХ за пределами полосы пропускания. Заявленное техническое решение является промышленно-применимым.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| Система адаптивного управления электрогидравлическим следящим приводом с контролем | 2015 |
|
RU2610851C1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Следящий рулевой электропривод содержит шесть сумматоров (1, 9, 16, 18, 21, 23), шесть фильтров нижних частот (2, 12, 24, 27, 29, 32), блок эталонной модели (3), два устройства сравнения (4, 14), усилитель мощности (5), исполнительный двигатель (6), редуктор (7), датчик обратной связи (8), два ограничителя (10, 20), четыре дифференцирующих устройства (11, 15, 25, 30), датчик скорости (13), три устройства деления (17, 34, 36), регулятор скорости (19), блок модели двигателя (22), два устройства выделения модуля (26, 31), пять логических устройств (28, 33, 37, 38, 39), функциональный преобразователь (35), соединенные определенным образом. Обеспечивается устранение автоколебаний в электроприводе, улучшение плавности движения при отработке низкочастотных сигналов, более эффективное подавление АЧХ за пределами полосы пропускания. 6 ил.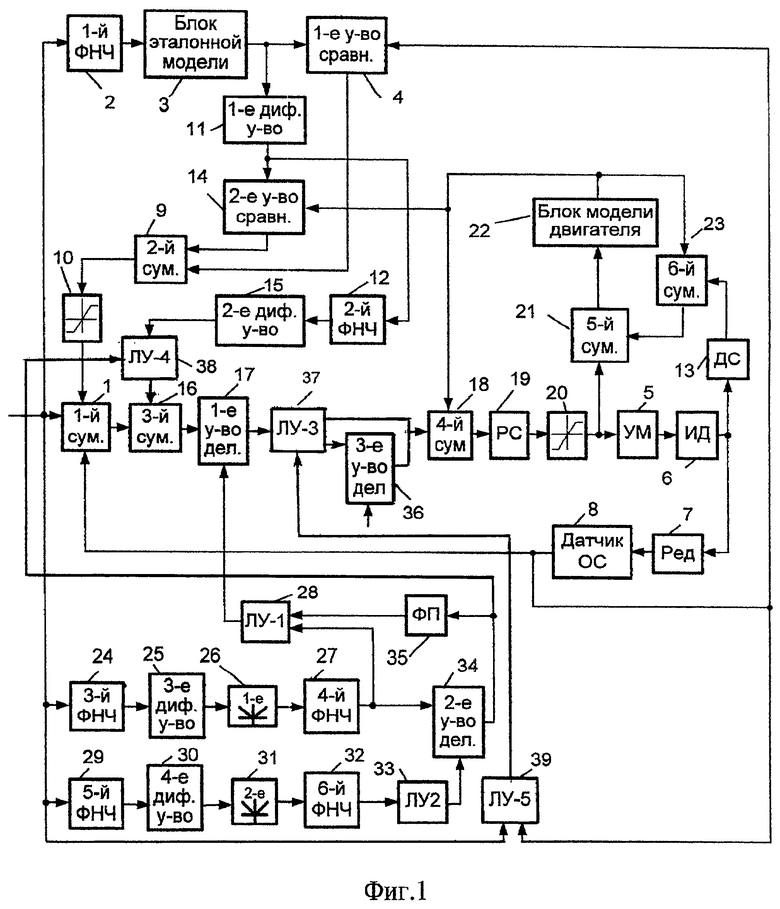
Следящий электрический рулевой привод, содержащий первый сумматор, на первый вход которого подается сигнал задания, последовательно соединенные первый фильтр нижних частот, блок эталонной модели, первое устройство сравнения, последовательно соединенные усилитель мощности, исполнительный двигатель, редуктор и датчик обратной связи, выход которого подключен ко вторым входам первого сумматора и первого устройства сравнения, последовательно соединенные первое дифференцирующее устройство, второе устройство сравнения, второй сумматор, первый ограничитель, выход которого подключен к третьему входу первого сумматора, последовательно соединенные второй фильтр нижних частот и второе дифференцирующее устройство, последовательно соединенные четвертый сумматор, регулятор скорости, второй ограничитель, пятый сумматор, блок модели двигателя, шестой сумматор, выход которого подключен ко второму входу пятого сумматора, последовательно соединенные третий сумматор и первое устройство деления, при этом датчик скорости соединен с валом исполнительного двигателя, последовательно соединенные третий фильтр нижних частот, третье дифференцирующее устройство, первое устройство выделения модуля, четвертый фильтр нижних частот, первое логическое устройство, выход которого подключен к входу делителя первого устройства деления, последовательно соединенные пятый фильтр нижних частот, четвертое дифференцирующее устройство, второе устройство выделения модуля, шестой фильтр нижних частот, второе логическое устройство, последовательно соединенные второе устройство деления и функциональный преобразователь, причем вход делимого второго устройства деления соединен с выходом четвертого фильтра нижних частот, вход делителя второго устройства деления соединен с выходом второго логического устройства, второй вход первого логического устройства соединен с выходом функционального преобразователя, вход первого фильтра нижних частот подключен к первому входу первого сумматора и к входам третьего и пятого фильтров нижних частот, выход первого сумматора подключен к первому входу третьего сумматора, выход которого подключен к входу делимого первого устройства деления, выход датчика скорости подключен ко второму входу шестого сумматора, выход блока эталонной модели соединен с входом первого дифференцирующего устройства, выход которого подключен к входу второго фильтра нижних частот, выход блока модели двигателя подключен ко вторым входам четвертого сумматора и второго устройства сравнения, выход первого устройства сравнения подключен ко второму входу второго сумматора, выход второго ограничителя соединен с входом усилителя мощности, третий фильтр нижних частот выполнен с широкой полосой пропускания, пятый фильтр нижних частот выполнен с узкой полосой пропускания, функциональный преобразователь выполнен с реализацией нарастающей зависимости выходного сигнала от входного с начальным участком, формирующим постоянный уровень выходного сигнала, первое логическое устройство выполнено с реализацией блокировки прохождения сигнала с функционального преобразователя при малых уровнях сигнала на выходе четвертого фильтра нижних частот, второе логическое устройство выполнено с реализацией исключения режима деления на ноль второго устройства деления, отличающийся тем, что дополнительно содержит третье устройство деления, третье, четвертое и пятое логические устройства, причем первый вход третьего логического устройства соединен с выходом первого устройства деления, второй вход третьего логического устройства соединен с выходом пятого логического устройства, первый выход третьего логического устройства подключен к первому входу четвертого сумматора, второй выход третьего логического устройства соединен с входом делимого третьего устройства деления, выход которого соединен с первым входом четвертого сумматора, первый и второй входы пятого логического устройства подключены соответственно к первому и второму входам первого сумматора, выход второго дифференцирующего устройства подключен к первому входу четвертого логического устройства, выход которого соединен со вторым входом третьего сумматора, выход второго устройства деления соединен со вторым входом четвертого логического устройства, третье логическое устройство выполнено с реализацией функции подключения сигнала с выхода первого устройства деления к первому входу четвертого сумматора или к входу делимого третьего устройства деления по сигналу с выхода пятого логического устройства, третье устройство деления выполнено с реализацией функции деления на постоянный коэффициент, четвертое логическое устройство выполнено с реализацией функции отключения выхода второго дифференцирующего устройства от второго входа третьего сумматора при низких частотах входного воздействия и на частотах за пределами полосы пропускания, а пятое логическое устройство выполнено с реализацией функции формирования интервала времени, с реализацией функции формирования логической единицы на выходе, если в течение заданного интервала времени модуль ошибки электропривода по положению и модуль приращения угла задания за единицу времени меньше заданных постоянных величин модуля ошибки электропривода и модуля приращения угла задания, с реализацией функции формирования логического нуля, если данное условие выполняется в течение интервала времени менее заданного, или модуль ошибки электропривода по положению, или модуль приращения угла задания за единицу времени больше указанных постоянных величин.
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2605948C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| Вращающаяся самонаводящаяся ракета | 2018 |
|
RU2694934C1 |
| 0 |
|
SU183670A1 | |
| CN 104539197 B, 25.01.2017. | |||

