10
15
20
Изобретение относится к электротехнике, а именно к электроприводу гееременного тока на базе машины двойного питания с непосредственным преобразователем частоты в цепи ротора, и может быть использовано в механизмах, требующих высоких динамических свойств и повышенной надежности, например в горно-металлургической промьш1ленности при регулировании числа оборотов ротора относительно синхронной скорости питающего поля,
Целью изобретения является повышение качества динамических характеристик электропривода переменного тока за счет уменьшения тока при переходе от нерегулируемого к регулируемому режиму работы.
На чертеже представлена функциональная схема электропривода переменного тока.
Электропривод переменного тока со- деряснт асинхронньш двигатель 1 с фаз- 25 ным ротором, подключенным к выходам непосредственного преобразователя 2 частоты, датчик 3 фазных токов ротора, регулятор 4 фазных токов, блок 5 компенсации, преобразователь 6 30 координат, блок 7 обратного преобразования, датчик 8 фазных токов статора, датчик 9 фазных напряжений статора, формирователь 10 сигналов задания активного и реактивного токов ротора, gg узел 11 сравнения, блок 12 деления, регулятор 13 частоты скольжения и формирователь 14 гармонических функций. Первый вход непосредственного преобразователя 2 частоты подключен 40 к выходу блока 5 компенсации, а втодания активного и реактивного токов ротора. Узел 11 сравнения соединен первым входом с первым выходом формирователя 10 сигналов задания активного и реактивного токов ротора, вторьм входом - с первым выходом блока 7 обратного преобразования, а выходом - с входом для делимого блока 12 деления. Вход для делителя блока 12 деления соединен с вторым выходом блока 7 обратного преобразования,третий выход которого соединен с первым входом формирователя 10 сигналов задания активного и реактивного токов ротора, другие два входа которого соединены соответственно с выходами датчиков 8 и 9 фазных токов и напряжений статора,
В электропривод переменного тока введены датчик 15 фазных напряжений ротора, датчик 16 потокосцеплений, фазовый дискриминатор 17, индикатор 18 уровня и управляемый переключатель, подключенный первым входом и выходом между выходом блока 12 деления и входом регулятора 13 частоты скольжения, вторым входом - к выходу фазового дискриминатора 17, а уп- равляюшдм входом - к выходу индикатора 18 уровня. При этом датчик 16 потокосцеплений подсоединен первым
входом к выходу датчика 3 фазных токов ротора, вторым входом - к выходу датчика 15 фазных напряжений ротора, первым выходом - к входу индикатора 18 уровня, вторым выходом - к первому входу фазового дискриминатора 17, второй и третий входы которого соединены соответственно с первым и вторым выходами формирователя 14 гармонических функций.
Используемый в электроприводе преобразователь частоты с непосредрой вход - к выходу регулятора 4. фазных токов, :соединенного первым входом с выходом преобразователя 6 координат, а вторым входом - с выходом.дат- 45 ственной связью имеет предельную вы- чика 3 фазных токов ротора. Первый и ходную частоту, меньшую частоты напряжения, подаваемого на статор асинхронного двигателя с фазным ротором. Следовательно, преобразователь частоты с непосредственной связью подключается при пуске привода к ротору
второй выходы формирователя 14 гармонических функций соединены соответственно с первым и вторым входами преобразователя 6 координат, третий и четвертый входы которого соединены соответственно с первым и вторым выходами формирователя 10 сигналов задания активного и реактивного токов р отора. Выход регулятора 13 частоты скольжения соединен с входом форми- . рователя 14 гармонических функций и с входом обратной связи по скольжению формирователя 10 сигналов за50
двигателя только после того, как частота вращения двигателя достигает значения (
СИНХр
- .г) где ч)
синхр
синхронная частота вращения; п1, - а5мйкс
предельная выходная частота преобразователя.
Для качественного подключения преобразователя частоты с непосред0
5
0
5 0 gg 40
дания активного и реактивного токов ротора. Узел 11 сравнения соединен первым входом с первым выходом формирователя 10 сигналов задания активного и реактивного токов ротора, вторьм входом - с первым выходом блока 7 обратного преобразования, а выходом - с входом для делимого блока 12 деления. Вход для делителя блока 12 деления соединен с вторым выходом блока 7 обратного преобразования,третий выход которого соединен с первым входом формирователя 10 сигналов задания активного и реактивного токов ротора, другие два входа которого соединены соответственно с выходами датчиков 8 и 9 фазных токов и напряжений статора,
В электропривод переменного тока введены датчик 15 фазных напряжений ротора, датчик 16 потокосцеплений, фазовый дискриминатор 17, индикатор 18 уровня и управляемый переключатель, подключенный первым входом и выходом между выходом блока 12 деления и входом регулятора 13 частоты скольжения, вторым входом - к выходу фазового дискриминатора 17, а уп- равляюшдм входом - к выходу индикатора 18 уровня. При этом датчик 16 потокосцеплений подсоединен первым
входом к выходу датчика 3 фазных токов ротора, вторым входом - к выходу датчика 15 фазных напряжений ротора, первым выходом - к входу индикатора 18 уровня, вторым выходом - к первому входу фазового дискриминатора 17, второй и третий входы которого соединены соответственно с первым и вторым выходами формирователя 14 гармонических функций.
Используемый в электроприводе преобразователь частоты с непосред45 ственной связью имеет предельную вы- ходную частоту, меньшую частоты напряжения, подаваемого на статор асинхронного двигателя с фазным ротором. Следовательно, преобразователь частоты с непосредственной связью подключается при пуске привода к ротору
45
50
двигателя только после того, как частота вращения двигателя достигает значения (
СИНХр
- .г) где ч)
синхр
синхронная частота вращения; п1, - а5мйкс
предельная выходная частота преобразователя.
Для качественного подключения преобразователя частоты с непосред3
ственной связью к ротору вращающегося двигателя при пуске привода, а также при повторных включениях необходимо, чтобы в момент подключения вектор выходного напряжения преобрд- зователя частоты был сориентирован необходимым образом относительно вектора ЭДС ротора.
В противном случае при случайной ориентации указанного вектора возможны недопустимо большие броски тока в моменты подключения преобразователя частоты к ротору.
Электропривод переменного тока работает следующим образом.
После запуска асинхронного двигателя 1 по одному из известных способов, применяемых для машин двойного питания, и разгона его до скорости, при которой частота тока ротора попадает в диапазон выходных рабочих частот, преобразователя 2 частоты, подключение последнего к ротору осуществляется с качественным переходным процессом и без бросков тока.
Благодаря использованию датчика
15фазных напряжений ротора, датчика
16потокосцеплений, фазового дискриминатора 17, управляемого переключателя 19 и индикатора 18 уровня к моменту подключения преобразователя частоты к ротору уже имеются сформированные формирователем 1А-гармонических функций ортогональные гармонические сигналы, совпадающие по
фазе с сигналами потокосцепления двигателя и задающие необходимые частот и фазу выходных токов преобразовател частоты.
Данные сигналы формируются контуром регулирования частоты скольжения, включающим в себя регулятор 13 частоты скольжения, формирователь 14 гармонических функций, фазовый Дискриминатор 17 и управляемый переключатель 19. Частота сигналов на выходе формирователя 14 пропорциональна величине аналогового сигнала, поступающего с выхода регулятора 13 частоты скольжения, входной сигнал f / которого поступает через переключатель 19 с выхода .фазового дискриминатора 17. Сигнал пропорционален углу рассогласования между опорными гармоническими сигналами, которьми задаются частота и фаза токов ротора, ортогональными составляющими по токЪсцепления, которые формируются
598814
в фазовом дискриминаторе 17 из сигналов фазных потокосцеплений, поступающих с выхода датчика 16 потоко сцеплений.
Управление переключателем 19 осуществляется выходным сигналом индикатора 18 уровня, который переключается при соответствии уровню сраба1Q тывания сигнала амплитудного значения ЭДС - IЕI, поступающего с выхода датчика 16.
После вступления электропривода в регулируемый режим работы функциони15 роваяие контура регулирования частоты скольжения, включающего в себя фазовый дискриминатор 17, продолжается до момента переключения переключателя 19. Асинхронный двигатель 1,
0 подключенный ротором к выходам преобразователя 2 частоты, подвергается управляющему воздействию со стороны системы,регулирования. Регулятор 4 фазных токов обеспечивает соответст5 вие фазных токов ротора сигналам задания благодаря большому коэффициенту усиления в контурах фазных токов ротора. Сигналы задания фазных токов ротора необходимой частоты и фазы
0 приходят с выхода преобразователя координат, на входы которого подаются опорные гармонические сигналы с выходов формирователя 14.
Выходной сигнал регулятора 13
5 частоты скольжения одновременно является сигналом обратной связи по частоте вращения, что исключает необходимость использования в электроприводе тахометрического датчика.
0 Работа электропривода во всем частотном диапазоне с фазовым дискриминатором 17 невозможна.
При малых частотах скольжения датчик 16 потокосцеплений работает
5 некачественно, так как его выходные сигналы формируются интегрированием сигналов фазных ЭДС ротора, соизме- римь1Х при малых частотах скольжения с помехой. Поэтому при малых часто0 тах скольжения (2-3 Гц) осуществляется переключение переключателя 19, в результате чего На вход регулятора 13 частоты скольжения поступает сигнал d(/ с выхода блока 12 деления.
5 Сигнал формируется путем сравнения с помощью узла 11 сравнения сигнала задания активного тока ротораХд ад и сигнала реального значения активного тока ротора I а. рот , поступающе51359881
го с соответствующего выхода блока 7 обратного преобразования, и последующего деления с помощью блока 12 деления результата сравнения на сигнал, пропорциональный реактивной сос-р. рот
постутавляющей тока ротора I
пающего с соответствующего выхода
блока 7,
Таким образом, введение в электропривод переменного тока датчика фазных напряжений ротора, датчика потокосцеплений, фазового дискриминатора, индикатора уровня и управляемого переключателя обеспечивает качественное подключение преобразователя частоты к ротору вращающегося асинхронного двигателя без бросков тока, благодаря чему повышается качество динамических характеристик привода в сравнении с известным устройством.
Формула изобретения
Электропривод переменного тока, содержащий асинхронный двигатель с фазным ротором, подключенным к выходам непосредственного преобразователя частоты, датчик фазных токов ротора, регулятор фазных токов, блок компенсации, преобразователь координат, блок обратного преобразования, датчики фазных токов и напряжений статора, формирователь сигналов задания активного и реактивного токов ротора, узел сравнения, блок деления, регулятор частоты скольжения и формирователь гармонических функций,первый вход непосредственного преобразователя частоты подключен к выходу блока компенсации, а второй вход - к выходу регулятора фазных токов, первым входом соединенного с выходом преобразователя координат, а вторым входом - с выходом датчика фазных токов ротора, первый и второй выходы формирователя гармонических функций соединены соответственно с первым и вторым входами преобразователя координат, третий и четвертьш входы которого соединены соответственно с первым и вторым выходами формирователя
в
сигна:лов задания активного и реактивного токов ротора, выход регулятора частоты скольжения соединен с входом формирователя гармонических функций и с входом обратной связи по скольжению формирователя сигналов задания активного и реактивного токов ротора узел сравнения соединен первым вхо0 дом с первым выходом формирователя сигналов задания активного и реактивного токов ротора, вторым входом - с первым выходом блока обратного преобразования, а выходом - с входом де5 лимого блока деления, вход делителя блока деления соединен с вторым выходом блока обратного преобразования, третий выход которого соединен с пер- , вым входом формирователя сигналов
0 задания активного и реактивного тиков ротора, другие два входа которого соединены соответственно с выходами датчиков фазных токов и напряжений статора, отличающий5 с я тем, что, с целью повышения качества динамических характеристик электропривода переменного тока за счет уменьшения бросков тока при переходе от нерегулируемого к регу0 лируемому режиму работы, введены датчик фазных напряжений ротора, дат-. чик потокосцеплений, фазовый дискриминатор, индикатор уровня и управляе- мьш переключатель, первый вход которого соединен с выходом блока деления, второй вход - с выходом фазового дискриминатора, управляющий вход упомянутого переключателя соединен с выходом индикатора уровня, а выход управляемого переключателя - с входом регулятора частоты скольжения, первый вход датчика потокосцепления подключен к выходу датчика фазных токов ротора, второй вход - к выходу датчика фазных напряжений ротора,первый выход датчика потокосцепления - к входу индикатора уровня, а второй выход - к первому входу фазового дис- ; криминатора, второй и третий входы которого соединены соответственно с первым и вторым выходами формирователя гармонических функций.
5
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1984 |
|
SU1251281A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод переменного тока | 1980 |
|
SU989731A1 |
Изобретение относится к электротехнике и может быть использовано в горно-металлургической промышленности. Целью изобретения является повьшение качества динамических характеристик электропривода переменного тока за счет уменьшения бросков тока при переходе от нерегулируемого к регулируемому режиму работы.. Указанная цель достигается введением в электропривод переменного тока датчика 15 фазных напряжений ротора асинхронного двигателя (АД) 1, датчика 16 потокосцепления, фазового дискриминатора 17, управляемого ключа 19 и индикатора уровня 18. В результате к моменту подключения преобразователя частоты (ПЧ) 2 к ротору АД 1 уже. имеются сформированные формирователем гармонических функций 14 ортогональные гармонические си1- налы, совпадающие по фазе с сигналами потокосцепления АД 1 и задающие необходимые частоту и фазу выходных потоков ПЧ 2. Это дает возможность исключить большие броски токов в момент подключения ПЧ 2 к ротору АД 1. 1 ил. (Л /2, р,гад Зр.стат. Ja.pomJp.pom. 1р.зад 00 сд х 00 00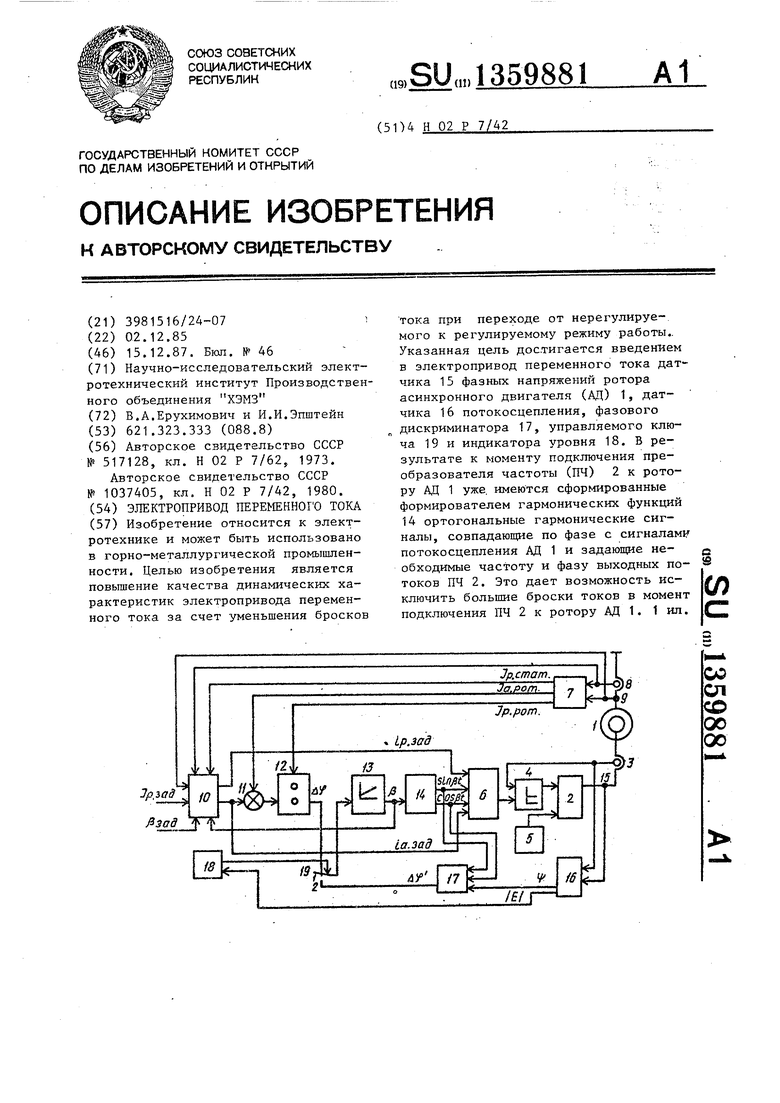
| Устройство управления асинхронной машиной с фазным ротором | 1973 |
|
SU517128A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
