Для вычерчивания образующих криволинейных поверхностей применяют приборы, содержащие устанавливаемую на контролируемой поверхности направляющую линейку с подвижной кареткой, несущей ощупывающее приспособление.
Известные приборы имеют тот недостаток, что не позволяют непрерывно регистрировать приращение ординат контролируемой кривой.
Для устранения указанного недостатка предлагается применять дифференциальный самописец с дистанционной электрической связью и снабжать ощупывающее приспособление двумя параллельно-подвижными роликовыми щупами, один из которых жестко связан с корпусом индуктивного датчика, а другой - с его якорем. Для синхронизации перемещения ленты самописца, в соответствии с длиной пройденного пути, предлагается устанавливать фрикционный ролик, перекатывающийся на каретке и кинематически связанный с сельсином-датчиком, управляющим сельсином-приемником механизма движения ленты самописца.
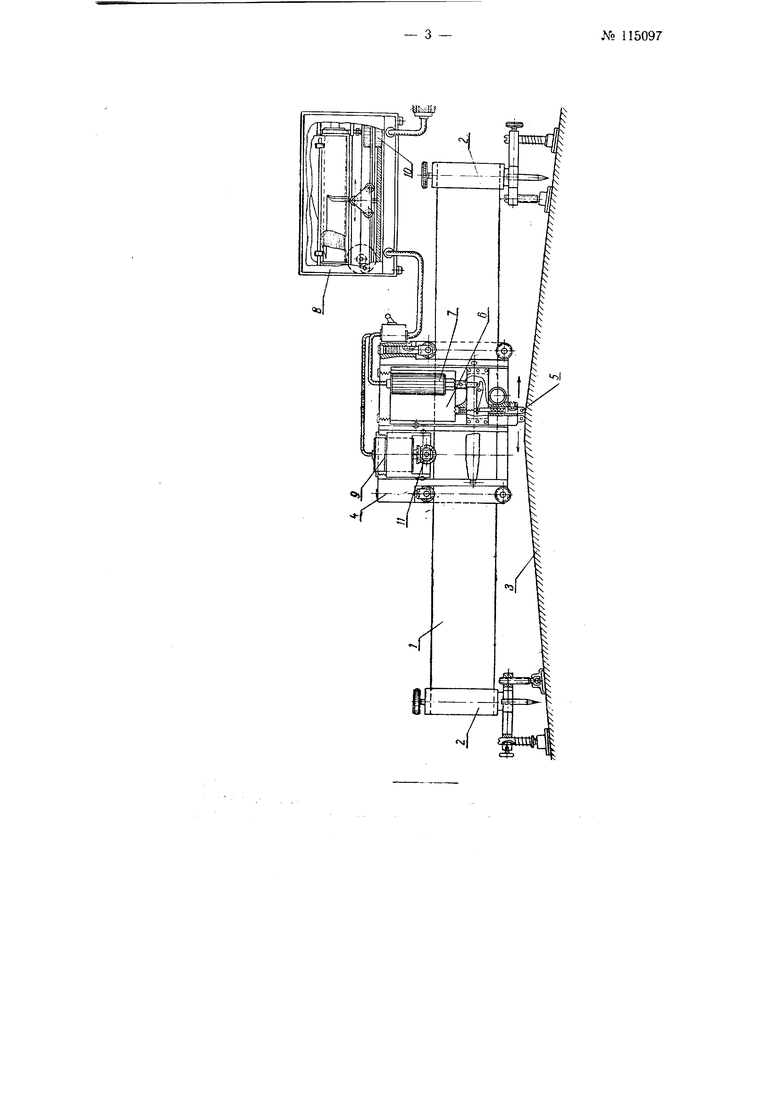
На чертеже изображена принципиальная схема предлагаемого прибора.
Прибор содержит направляющую линейку 1, устанавливаемую посредством стоек 2 на контролируемой поверхности 3. Вдоль линейки / может перемещаться каретка 4 с ощупывающим приспособлением. Ощупывающее приспособление снабжено двумя подвижными роликовыми щупами 5, один из которых жестко связан с корпусом 6 индуктивного датчика, а другой с его якорем 7.
В приборе применен дифференциальный самописец 8 с дистанционной электрической связью. Эта связь осуществляется посредством сельсина-датчика Р, который смонтирован в каретке 4 и перемещается вдоль линейки /, и сельсина-приемника 10, управляющего механизмом движения ленты самописца. Сельсин-датчик 9 включается в работу одновременно с индуктивным датчиком и передает электрические импульсы на сельсин-приемник.
№ 115097
Прибор позволяет вести непрерывную запись кривой с контролируемой поверхности. Для этой цели на каретке 4 установлен фрикционный ролик 11, взаимодействующий с направляющей линейкой / прибора и кинематически связанный с ротором сельсина-датчика 9. В результате этого лента дифференциального самописца 8 будет перемещаться в соответствии с длиной пройденного кареткой пути вдоль контролируемой кривой На бумажной ленте вычерчивается дифференциальная кривая, представляющая собою функцию приращепий dx по dy, регистрируемых датчиком. Эта кривая обрабатывается на интерографе, на котором получают интегральную кривую, т. е. действительную кривую измеряемой поверхности. Указанную кривую затем методом наложения сравнивают с заданной кривой.
Предмет изобретения
Прибор для вычерчивания образующей криволинейных поверхностей с установленной на контролируемой поверхности направляющей линейкой с подвижной кареткой, несущей ощупывающее приспособление, о тличающийся тем, что, с целью непрерывной регистрации приращений ординат контролируемой кривой, применен дифференциальный самописец с дистанционной электрической связью, ощупывающее приспособление снабжено двумя параллельно-подвижными роликовыми щупами, один из которых жестко связан с корпусом индуктивного датчика, а другой с его якорем, и для синхронизации перемещения ленты самописца, в соответствии с длиной пройденного пути, установлен фрикционный ролик, перекатывающийся по каретке и кинематически связанный с сельсином-датчиком, управляющим сельсином-приемником механизма движения ленты самописца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дорожная инвентаризационная машина | 1976 |
|
SU634098A1 |
| Прибор для проходки рельса и измерения вертикального износа по его длине | 1939 |
|
SU57044A1 |
| ЧЕРТЕЖНЫЙ ПРИБОР ДЛЯ СЛЕПЫХ | 1966 |
|
SU181888A1 |
| Универсальная машина для испытаний материалов на кручение | 1959 |
|
SU148939A1 |
| Устройство для контроля овальности элементов трубопроводов | 2019 |
|
RU2700716C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ СТРЕЛЫ ПРОВЕСА ВОЛОКОННО-ОПТИЧЕСКИХ КАБЕЛЕЙ (ВОК), ПОДВЕШЕННЫХ НА ОПОРАХ КОНТАКТНОЙ СЕТИ | 2007 |
|
RU2342261C1 |
| ТЕСТОВАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ЭЛЕКТРОННЫХ СОЕДИНЕНИЙ ЭЛЕМЕНТОВ С ПЕЧАТНОЙ ПЛАТОЙ | 2017 |
|
RU2713102C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |