Область использования
Изобретение относится к измерительной технике и может быть использовано в качестве одного из средств диагностирования трубных систем, в том числе в составе оборудования тепловых электростанций, в частности для определения овальности гибов трубопроводов пара и горячей воды.
Уровень техники
В составе трубопроводных систем оборудования, работающего под избыточным давлением, имеются изогнутые элементы (гибы), одной из характеристик состояния которых является овальность, представляющая собой параметр в виде отношения максимальной разности двух взаимоперпендикулярных диаметров к среднему (номинальному) диаметру данного трубного элемента [1]. Поскольку овальность влияет на уровень напряжений в гибах, рекомендуется выполнять измерения данного параметра для гибов ответственных трубопроводных систем. В частности, на тепловых электростанциях в соответствии с требованиями технической эксплуатации должно проводиться измерение овальности гибов как на стадии входного контроля, так и при периодическом регламентном контроле на остановленном оборудовании [1]. Обычно в расчет принимается максимальное значение овальности в контрольных сечениях гиба.
Известно устройство периодического контроля на остановленном или работающем оборудовании овальности сечения трубного элемента трубопровода: авторское свидетельство СССР №1254278 кл. G01B 5/20, опубл. 30.08.1986 [2], содержащее составной несущий корпус из двух полуколец, четыре подпружиненных щупа, продольные оси которых у противоположных щупов совпадают, а у смежных щупов лежат в одной плоскости и пересекаются под прямым углом, установленные в корпусе четыре электроизоляционные втулки с токоподводами, четыре прижимные пружины, каждая из которых установлена между одним из щупов и корпусом, четыре гибкие нити, каждая из которых соединена с одним из щупов, электродвигатель с блоком управления, формирующим команды через заданные интервалы времени. При установке корпуса на трубопроводном элементе щупы под действием прижимных пружин прижимаются к металлической поверхности трубопровода. В процессе изменения формы сечения трубного элемента его взаимоперпендикулярные диаметры изменяют свои значения, за счет этого щупы перемещаются, эти перемещения через гибкие нити передаются рычагам, угловые положения которых связаны с положением щупов. Эти положения отображаются на суммирующем диске с помощью подвижных фиксаторов. При вращении диска электродвигателем фиксаторы проходят мимо контактного датчика, дающего на блок управления сигнал на включение и выключение электромагнитной муфты, вследствие чего оцифрованный барабан перемещается на величину, пропорциональную алгебраической сумме углов поворота всех четырех рычагов и одновременно пропорциональную алгебраической сумме перемещений щупов, т.е. изменений размеров двух взаимоперпендикулярных диаметров контролируемого трубного элемента.
К достоинствам измерения овальности трубных элементов с помощью описанного выше устройства можно отнести:
- возможность периодического измерения овальности посредством определения изменений размеров двух взаимоперпендикулярных диаметров трубного элемента в фиксированном положении щупов;
- исключение вручную выполняемых операций по измерению геометрических размеров элементов трубопроводов;
- возможность проведения контроля при малом объеме удаления тепловой изоляции;
- возможность регистрации результата измерений.
К недостаткам [2] следует отнести:
- достаточно громоздкая и в механической части сложная конструкция, содержащая натяжные нити, шарниры, рычаги, взаимодействующие между собой, что снижает точность измерения;
- достаточно сложная электромеханическая схема, что уменьшает надежность работы устройства;
- значительные габариты устройства, что может создавать препятствия для его установки на действующем оборудовании, когда доступность элемента для контроля ограничена;
- при контроле в установленном положении устройства измеряются изменения диаметров трубы в двух взаимоперпендикулярных направлениях, соответствующих фиксированным положениям щупов, а фактически требуется определять данную характеристику по всему периметру сечения, т.е. во всех возможных положениях двух взаимоперпендикулярных диаметров, что вызывает необходимость перестановки устройства путем его перемещения вокруг оси трубы на некоторую величину центрального угла и фиксации в этом новом положении для выполнения следующего измерения. Далее эта процедура должна повторяться вплоть до поворота устройства вокруг сечения трубы на четверть оборота с целью получения серии дискретных значений разницы двух взаимоперпендикулярных диаметров для данного контрольного сечения трубы.
Раскрытие изобретения
Задачей патентуемого изобретения является обеспечение надежного контроля овальности поперечного сечения трубных элементов трубопроводов, а техническим результатом - обеспечение возможности более точного измерения разности взаимоперпендикулярных диаметров по всему контуру контролируемого сечения с автоматической регистрацией результатов, а также обеспечение возможности перемещения заявленного устройства, установленного на трубопроводе, вокруг оси вышеуказанного трубопровода без необходимости отсоединения и переустановки устройства с целью обеспечения возможности получения непрерывной диаграммы измеряемого параметра.
Решение указанной задачи путем достижения указанного технического результата обеспечивается тем, что в устройстве контроля овальности элементов трубопроводов, содержащем составной несущий корпус из двух полуколец, имеются четыре прижимных установочно-измерительных узла, расположенных в одной плоскости таким образом, что продольные оси каждой пары противоположных узлов совпадают, а оси смежных узлов пересекаются под прямым углом. При этом каждый из вышеуказанных узлов содержит неподвижно закрепленный на составном несущем корпусе призматический держатель с установленными в нем направляющим стержнем и индуктивным датчиком. На противоположном от закрепленного в держателе конце каждого из направляющих стержней жестко установлена опорная каретка, содержащая катки, предназначенные для перемещения по поверхности трубы. На каждый из направляющих стержней надета пружина, предназначенная для фиксации соответствующего направляющего стержня на трубе враспор относительно держателя и для прижатия катков соответствующей каретки к поверхности трубы. Каждая из вышеуказанных кареток также выполняет функцию мишени для упора щупа соответствующего индуктивного датчика. При этом все вышеуказанные индуктивные датчики соединены в полумостовую электрическую схему таким образом, что каждое из двух смежных активных плеч полумоста включает два диаметрально противоположных датчика, обеспечивая возможность непосредственного измерения разности двух взаимоперпендикулярных диаметров контрольного сечения трубного элемента с непрерывной регистрацией результата на самопишущем приборе.
Причинно-следственная связь между совокупностью существенных признаков патентуемого изобретения и достигаемым техническим результатом заключается в том, что создание устройства в виде съемного приспособления, выполненного в виде составного несущего корпуса из двух полуколец, на котором по концам двух взаимоперпендикулярных диаметров жестко установлены четыре прижимных установочно-измерительных узла, каждый из которых содержит закрепленный в его держателе индуктивный датчик и подпружиненную относительно корпуса и поверхности трубы опорную каретку, способную перемещаться по поверхности трубы за счет входящих в нее катков и служащую одновременно упорной мишенью для щупа индуктивного датчика исключает необходимость использования в конструкции гибких элементов (нитей, тросиков), шарниров, рычагов и пр., снижающих точность измерений, и обеспечивает возможность непрерывной регистрации разности двух взаимоперпендикулярных диаметров для всех их взаимоположений относительно контура сечения посредством перемещения корпуса вокруг трубы с помощью кареток без отсоединения и переустановки установленного на трубопроводе устройства.
Снабжение каждой из кареток четырьмя ходовыми катками (шарикоподшипниками) повышает точность измерений благодаря исключению возможности смещения каретки относительно контрольного сечения как в направлении оси (образующей) трубы, так и в направлении углового отклонения от направляющей.
Использование в предложенном устройстве индуктивных датчиков дает возможность прямого измерения за счет перемещения щупов датчиков (т.е. без промежуточных связей) изменений двух взаимоперпендикулярных диаметров контрольного сечения, а применение полумостовой схемы с включением в каждое из двух смежных активных плеч полумоста двух диаметрально противоположно размещенных датчиков обеспечивает при соответствующей тарировке получение сигнала, непосредственно определяющего разницу этих двух диаметров сечения трубы.
Краткое описание фигур чертежей
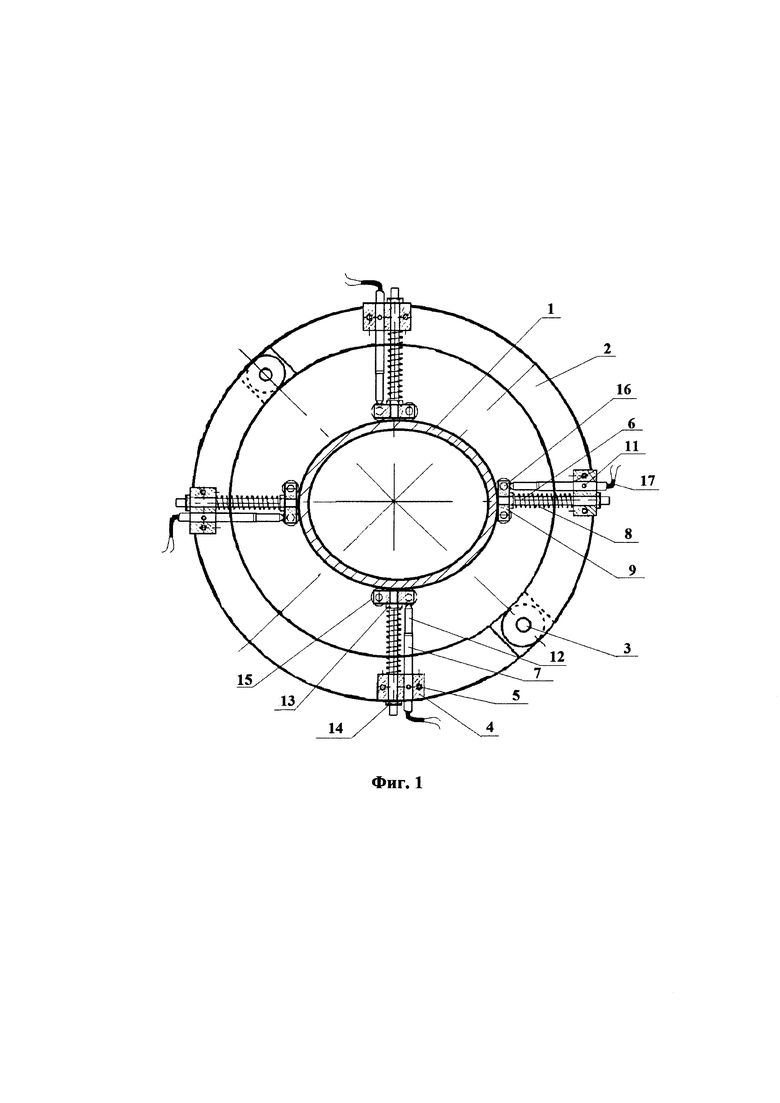
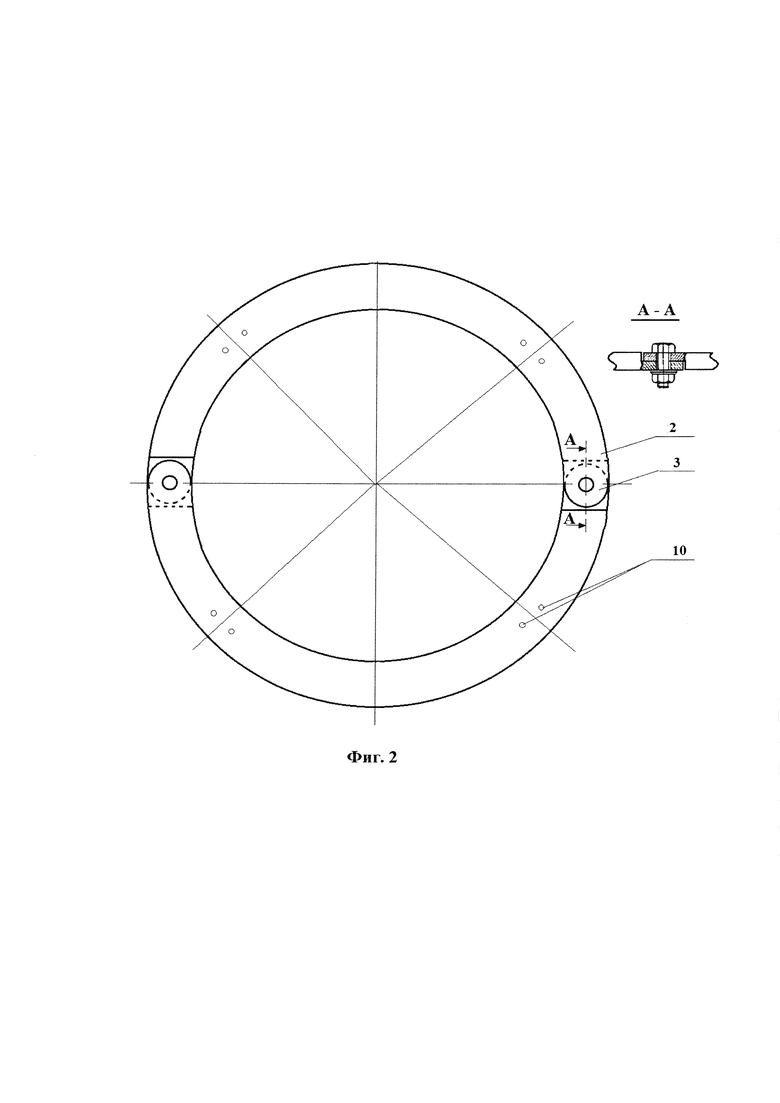
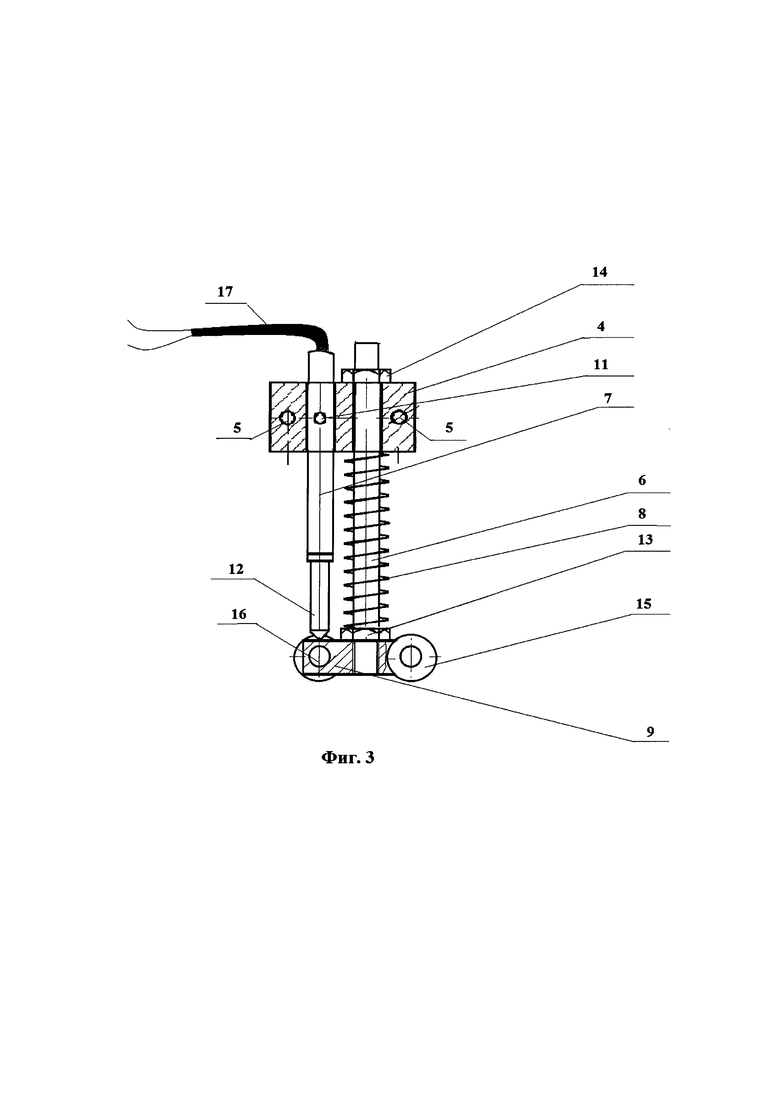
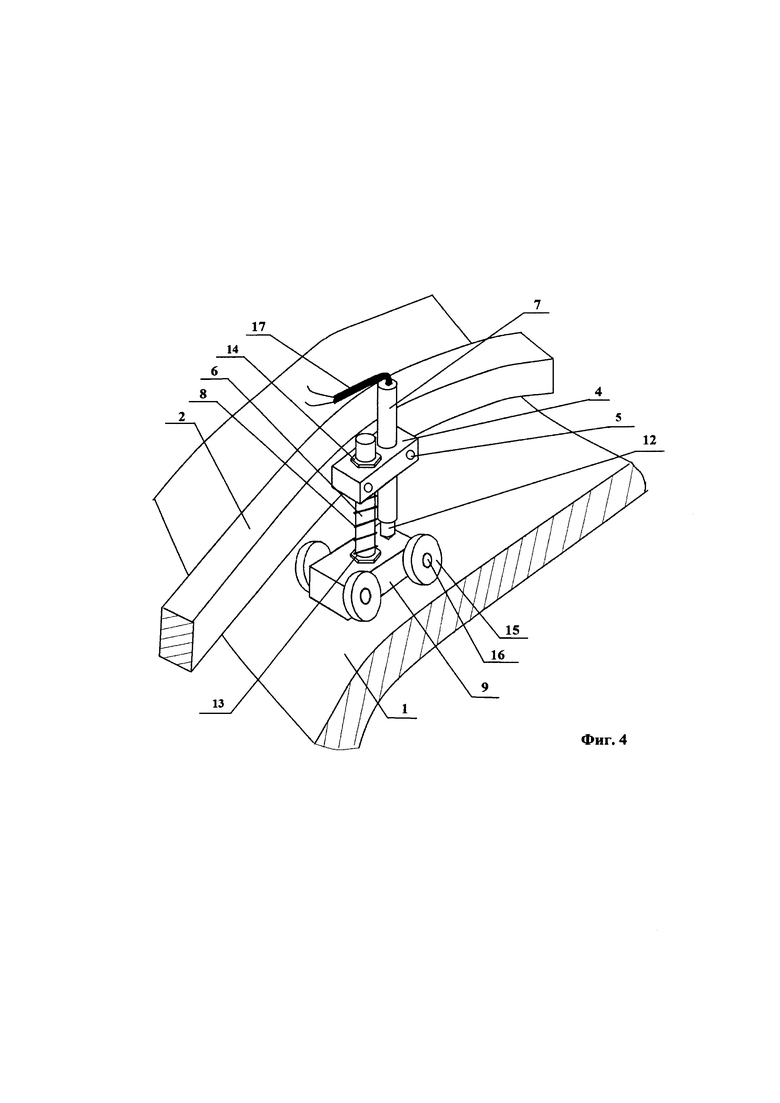
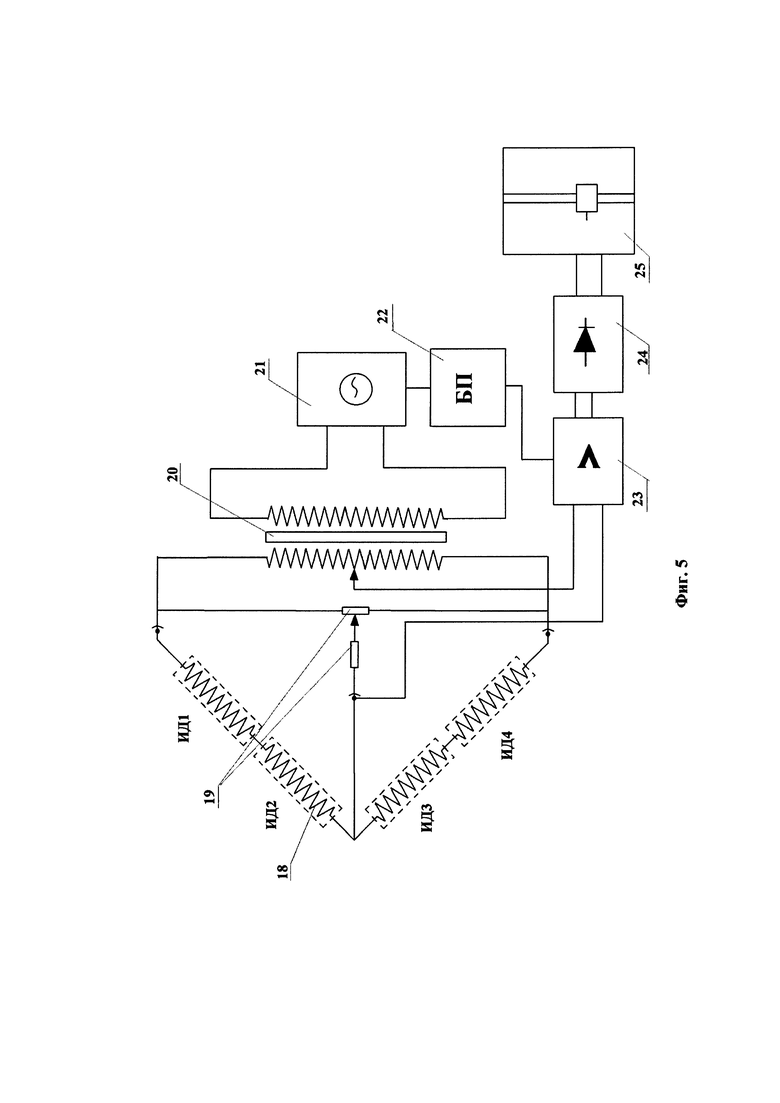
На фиг. 1 схематично изображен общий вид устройства - вид вдоль оси трубы; на фиг. 2 - составной несущий корпус - вид в плане; на фиг. 3 - прижимной установочно-измерительный узел в виде сбоку (вдоль оси трубы); на фиг. 4 - эскизно изображен прижимной установочно-измерительный узел с датчиком и опорной кареткой; на фиг. 5 - принципиальная блок-схема измерения разности двух взаимоперпендикулярных диаметров.
Перечень условных обозначений:
ИД - индуктивный датчик;
КСТ - контролируемое сечение трубы;
НС - направляющий стержень;
ОК - опорная каретка;
ПП - прижимная пружина;
ПУИУ - прижимной установочно-измерительный узел;
СНК - составной несущий корпус.
Перечень позиций чертежей:
1- контролируемое сечение трубы (КСТ); 2 - составной несущий корпус (СНК) в сборе; 3 - болтовое соединение СНК; 4 - держатель; 5 - установочные отверстия; 6 - направляющий стержень (НС); 7 - индуктивный датчик (ИД); 8 - прижимная пружина (ПП); 9 - опорная каретка (ОК); 10 - крепежные отверстия для держателя; 11 - фиксирующий винт; 12 - щуп ИД; 13 - контр-гайка; 14 - ограничительная гайка; 15 - каток; 16 - ось катка; 17 - кабель ИД; 18 - рабочий элемент (катушка) ИД; 19 - балансировочные резисторы; 20 - трансформатор; 21 - генератор; 22 - блок питания; 23 - усилитель; 24 - демодулятор; 25 - регистрирующий прибор.
Осуществление изобретения
Устройство для контроля овальности элементов трубопроводов согласно изобретению выполнено в виде составного несущего корпуса (СНК) 2 из двух жестко соединенных между собой посредством болтового соединения 3 полуколец, охватывающих контролируемое сечение трубы (КСТ) 1, с прикрепленными к СНК под углом 90°, т.е. по концам взаимоперпендикулярных диаметров, четырьмя прижимными установочно-измерительными узлами (ПУИУ). ПУИУ установлены на СНК 2 при помощи держателей 4, жестко прикрепленных к нему через установочные отверстия 5 винтами (не показаны), ввинченными в резьбовые крепежные отверстия 10. Исполнительные размеры полуколец выбирают из соображений обеспечения достаточной жесткости конструкции и по возможности облегчения ее веса. Представляется достаточной ширина полукольца ≈30 мм, толщина ≈10 мм. В держателе 4 выполнены два симметрично расположенные отверстия, одно из которых предназначено для крепления корпуса индуктивного датчика (ИД) 7 с помощью фиксирующего винта 11, а другое - для установки направляющего стержня (НС) 6, на противоположном (от держателя) конце которого жестко закреплена опорная каретка (ОК) 9, фиксируемая на поверхности КСТ 1 прижимной пружиной (ПП) 8, охватывающей НС 6, за счет поджатая ОК 9 враспор между поверхностью трубы и держателем, прикрепленным к корпусу.
Для обеспечения точности измерений крепежные отверстия для держателя 10 в СНК и установочные отверстия в самом держателе: 5 - под крепежные винты, 6 - под НС и 7 - под индуктивный датчик выполняют таким образом, чтобы оси каждой пары двух противоположных НС совпадали, составляли прямой угол с совмещенной осью пары смежных НС и были ориентированы строго вдоль корпуса (кольца), а также, чтобы оси отверстий под НС и под корпус ИД в каждом держателе были параллельны.
НС 6 жестко крепится к ОК 9 посредством резьбового соединения и фиксируется для надежности контр-гайкой 13. Рабочая поверхность НС гладкая и он способен свободно по скользящей посадке перемещаться в установочном отверстии держателя 4. Исходное состояние НС в держателе фиксируется в положении заданного поджатая прижимной пружины 8, достаточного для перемещения каретки на ожидаемую величину снижения диаметра КСТ 1 (примерно половина рабочего хода пружины), и закрепляется в этом положении ограничительной гайкой 14, навинченной на крайний резьбовой конец НС. Исходное положение упирающегося в каретку щупа ИД 12 задается положением его корпуса, закрепленного в держателе 4 фиксирующим винтом 11 таким образом, чтобы щуп оказался примерно посредине измерительного диапазона ИД. Каретка снабжена двумя парами катков 15, насаженных на оси 16, благодаря чему каретка может перемещаться (катиться) по поверхности трубы за счет вращения катков. Расстояние между осями 16 и размер базы между двумя катками в одной паре (на одной оси) должны быть минимизированы для обеспечения достаточной локальности зоны контроля. В качестве катков предлагается использовать стандартные шарикоподшипники малого размера: 10 или 15 мм. Через выводы кабелей ИД 17 индуктивные датчики включаются в полумостовую электрическую схему. При этом каждая пара диаметрально противоположно установленных на корпусе устройства индуктивных датчиков (соответственно ИД 1 - ИД 2 и ИД 3 - ИД 4) составляют отдельные смежные плечи полумоста, благодаря чему сигналы в пределах каждого плеча представляют алгебраическую сумму сигналов, снимаемых с катушек 18 соответствующей пары датчиков. Ответная часть полумоста находится во вторичном приборе, и питание полумоста осуществляется через трансформатор 20 от генератора 21 напряжением несущей частоты. В состав вторичного прибора входят также блок питания 22, усилитель 23 и демодулятор 24. Для улучшения окончательной балансировки полумоста, выполняемой предварительно вторичным прибором, в диагонали полумоста включены балансировочные резисторы 19. Генератор 21 и усилитель 23 запитываются напряжением от блока питания 22. Снимаемый с измерительной диагонали полумоста сигнал несущей частоты, модулированный напряжением измеряемого параметра, усиливается усилителем прибора 23 и подается на фазочувствительный детектор - демодулятор 24, который выделяет сигнал модулирующей частоты, а составляющая несущей частоты задерживается фильтром. Получаемый таким образом на выходе из прибора сигнал, пропорциональный по величине и знаку измеряемому параметру, т.е. разнице двух взаимоперпендикулярных диаметров в контрольном сечении, подается на регистрирующий прибор 25.
Предусматривается использование штатных индуктивных датчиков промышленного изготовления. Для наиболее распространенных типоразмеров трубных элементов предлагаются следующие датчики:
- для труб диаметром до 250 мм - тип ACT 500 А с рабочим ходом щупа ± 12,5 мм;
- для труб диаметром более 250 мм и до 500 мм - тип ACT 1000 А с рабочим ходом щупа ± 25 мм.
В качестве вторичных приборов могут использоваться усилители, работающие с полумостовыми схемами и обеспечивающие их питание напряжением несущей частоты (от нескольких единиц до нескольких десятков кГц). Регистрирующий прибор может представлять собой простой самописец, протягивающий ленту с постоянной скоростью и обеспечивающий перемещение пера пропорционально измеряемому сигналу. В современной версии регистрация сигнала организовывается с использованием компьютерной техники.
Устройство согласно изобретению работает следующим образом. Для проведения измерений на контролируемом участке соответствующего трубного элемента снимают тепловую изоляцию и в выбранном для контроля сечении устанавливают заявленное устройство. Для труб каждого типоразмера или нескольких близких типоразмеров изготавливается собственный составной несущий корпус соответствующего размера, а прижимные установочно-измерительные узлы с входящими в них деталями могут быть универсальными для достаточно широкого сортамента труб. Установка заявленного устройства на объекте контроля осуществляется путем обхвата контрольного трубного элемента в области контролируемого сечения трубы 1 составным несущим корпусом 2, одно из болтовых соединений которого 3 расслаблено в виде шарнира, а другое полностью разомкнуто, после чего оба болтовых соединения жестко скрепляются, обеспечивая сжатие прижимных пружин и давая упруго-жесткую посадку устройства на поверхности контрольного сечения трубы. Перед установкой на объекте контроля осуществляется балансировка устройства и его электрической схемы на эталонном отрезке трубы правильной цилиндрической формы и соответствующего размера (диаметра) или на специальном устройстве, содержащем два пересекающихся под прямым углом микрометрических винта и позволяющем благодаря этому задавать нужный исходный размер каждого из двух взаимопересекающихся под углом 90° диаметров, а также обеспечивающем одновременно возможность тарировки устройства. В результате упруго-жесткой посадки устройства на контролируемом элементе опорные каретки 9, упираясь катками 15 в поверхность трубы, сдвигают на определенную дистанцию, направляющие стержни 6 за счет сжатия ПП 8 занимают положения, соответствующие двум взаимоперпендикулярным диаметрам контрольного сечения. При этом щупы 12 индуктивных датчиков, упирающиеся в верхнюю площадку ОК 9, также займут заданные положения, соответствующие указанным диаметрам.
Разница в положениях каждой пары противоположных щупов, соответствующих сначала исходным диаметрам при начальной балансировке на эталонном образце (или специальном устройстве) и затем фактически измеряемым диаметрам контролируемого элемента после установки на нем заявленного устройства выражается в пропорциональном изменении реактивного сопротивления каждого из датчиков.
Так, если при увеличении, к примеру, одного из измеряемых диаметров (D1) относительно эталона на ΔD1, что означает смещение каждого из соответствующих щупов относительно сбалансированного положения на ΔD1/2 (при условии равных жесткостей пружин), реактивное сопротивление каждого из этих датчиков изменяется на величину ΔR1/2, то при уменьшении второго, перпендикулярного к первому, диаметра (D2) перемещения щупов, контролирующих этот диаметр, составят некие величины обратного знака, т.е. -ΔD2/2, и соответственно реактивные сопротивления каждого из этой другой пары датчиков изменятся на величину -ΔR2/2. Очевидно, что в этом случае разница между большим и меньшим диаметрами составит 
При предлагаемой измерительной схеме сопротивления в двух активных плечах полумоста изменятся на ΔR1 и -ΔR2. Возникший разбаланс полумоста приведет к появлению сигнала в его измерительной диагонали, пропорционального ΔR1-(-ΔR2)=ΔR1+ΔR2. Следовательно, устройство сразу будет выдавать сигнал, пропорциональный алгебраической разнице изменений двух взаимоперпендикулярных диаметров контрольного сечения при фиксированном относительно центра данного сечения положении этих двух взаимоперпендикулярных диаметров. При вращении (вручную) устройства вокруг оси цилиндрического элемента, обеспечиваемого посредством перемещения опорных кареток 9 с помощью катков 15 по поверхности трубы, прижимные установочно-измерительные узлы огибают по дуге контур контрольного сечения, и их продольные оси принимают последовательно все возможные положения в пределах задаваемого угла вращения. Благодаря этому считывается и регистрируется непрерывная последовательность измеряемых сигналов, соответствующих разности двух взаимоперпендикулярных диаметров, при их изменяющейся ориентации. Сигнал подается на самописец, который регистрирует диаграмму изменения разности двух взаимоперпендикулярных диаметров по контуру контрольного сечения.
Достаточно выполнять половину от полного оборота устройства вокруг центра контролируемого сечения (т.е. на угол π), так как вторая половина оборота дает аналогичную картину. При этом вторая четверть от указанной половины оборота будет давать диаграмму, зеркально отображающую относительно линии нулевого сигнала диаграмму, полученную от первой четверти. Обычно за расчетную величину овальности цилиндрического элемента принимается максимальное для выбранного контрольного сечения значение разности двух взаимоперпендикулярных диаметров, деленное на величину номинального диаметра. Поскольку овальность является абсолютной (т.е. положительной) величиной, то максимальное положительное значение разности двух взаимоперпендикулярных диаметров и соответствующее ему из другой четверти оборота максимальное значение модуля отрицательной разности этих диаметров целесообразно усреднять. Также для заданного контрольного сечения целесообразно выполнять три измерения со сдвижкой на 10-15 мм устройства вдоль оси трубы в разные стороны от центрального положения с последующим усреднением результата. Сдвижку устройства можно производить без его съема с контролируемого элемента за счет поджатия всех четырех пружин.
Промышленная применимость
Устройство периодического контроля овальности сечения трубного элемента согласно патентуемому изобретению отвечает условию «промышленная применимость». Сущность технического решения раскрыта в формуле, описании и чертежах достаточно ясно для понимания и промышленной реализации соответствующими специалистами на основании современного уровня техники в области теплоэнергетики.
Список источников.
1. Стандарт организации ОАО РАО «ЕЭС России» СТО 17230282.27.100.005 - 2008. Основные элементы котлов, турбин и трубопроводов ТЭС. Контроль состояния металла. Нормы и требования. М.: 2008.
2. Авторское свидетельство СССР №1254278 кл. G01B 5/20, опубл. 30.08.86. Устройство для контроля овальности цилиндрических тел.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок с ЧПУ для заточки инъекционных игл одноразовых шприцов | 1990 |
|
SU1774911A3 |
| Устройство для орбитальной обработки неповоротных стыков и торцов труб | 2018 |
|
RU2696984C1 |
| Устройство для резки длинномерных изделий | 1983 |
|
SU1140908A1 |
| Устройство для сборки трубных пучков теплообменных аппаратов | 1980 |
|
SU889222A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРУЖИННЫХ ЛАМЕЛЕЙ С ТРЕХПИЛЬНЫМ СТАНКОМ ДЛЯ РАСКРОЯ ГНУТО-ЛИСТОВЫХ МАТЕРИАЛОВ И МЕХАНИЗМОМ ПИЛЕНИЯ С ГЛУШИТЕЛЕМ ШУМА ДИСКОВОЙ ПИЛЫ | 2014 |
|
RU2563674C1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2011 |
|
RU2478539C2 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗОГНУТЫХ ТРУБ | 2016 |
|
RU2622197C1 |
| СИСТЕМЫ И СПОСОБЫ, ИСПОЛЬЗУЕМЫЕ ПРИ СВАРКЕ ОТРЕЗКОВ ТРУБЫ В ТРУБОПРОВОДЕ | 2017 |
|
RU2750760C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ РЕЗЬБЫ ТРУБНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2342632C2 |
Изобретение может быть использовано в качестве одного из средств диагностирования трубных систем, в том числе в составе оборудования тепловых электростанций для определения овальности гибов трубопроводов. Устройство включает в себя составной несущий корпус из двух полуколец и четыре прижимных узла, расположенных в одной плоскости таким образом, что продольные оси каждой пары противоположных узлов совпадают, а оси смежных узлов пересекаются под прямым углом. При этом каждый из узлов содержит держатель с установленными в нем направляющим стержнем и индуктивным датчиком. На каждый из стержней надета пружина. На противоположном от закрепленного в держателе конце каждого из стержней жестко установлена каретка. При этом каждая каретка выполняет функцию мишени для упора щупа соответствующего индуктивного датчика. При этом все индуктивные датчики соединены в полумостовую электрическую схему таким образом, что каждое из двух смежных активных плеч полумоста включает два диаметрально противоположных датчика. Технический результат - точное измерение разности взаимоперпендикулярных диаметров с автоматической регистрацией результатов и возможность перемещения устройства вокруг оси трубопровода без необходимости отсоединения и переустановки для получения непрерывной диаграммы измеряемого параметра. 5 ил.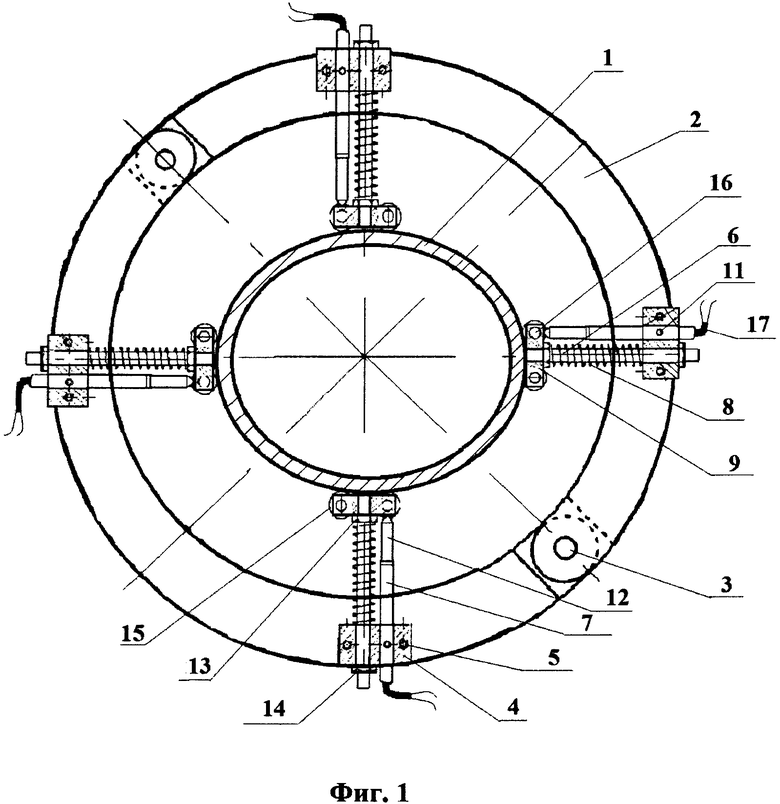
Устройство для контроля овальности элементов трубопровода, включающее составной несущий корпус из двух полуколец, отличающееся тем, что содержит четыре прижимных установочно-измерительных узла, расположенных в одной плоскости таким образом, что продольные оси каждой пары противоположных узлов совпадают, а оси смежных узлов пересекаются под прямым углом; при этом каждый из вышеуказанных узлов содержит неподвижно закрепленный на составном несущем корпусе призматический держатель с установленными в нем направляющим стержнем и индуктивным датчиком; на противоположном от закрепленного в держателе конце каждого из направляющих стержней жестко установлена опорная каретка, содержащая катки, предназначенные для перемещения по поверхности трубы; на каждый из направляющих стержней надета пружина, предназначенная для фиксации соответствующего направляющего стержня на трубе враспор относительно держателя и для прижатия катков соответствующей каретки к поверхности трубы; каждая из вышеуказанных кареток также выполняет функцию мишени для упора щупа соответствующего индуктивного датчика; при этом все вышеуказанные индуктивные датчики соединены в полумостовую электрическую схему таким образом, что каждое из двух смежных активных плеч полумоста включает два диаметрально противоположных датчика, обеспечивая возможность непосредственного измерения разности двух взаимоперпендикулярных диаметров контрольного сечения трубного элемента с непрерывной регистрацией результата на самопишущем приборе.
| Паровозная коловратная машина | 1932 |
|
SU34242A1 |
| US 9400162 B2, 26.07.2016 | |||
| Способ контроля геометрических параметров металлической трубы | 1986 |
|
SU1682761A1 |
| Устройство для измерения овальности цилиндрических изделий | 1988 |
|
SU1573331A1 |
| US 5963030 A, 05.10.1999. | |||

