Радиохимические гндромалипуляторы с примсие;1ием защитных камер, вытяжных шкафов или предохраннтс.чьных экракои с вынесенными наружу органами управления, приводимыми в действие вручную, известны, но они не обеенечивают возможиостн днстанн,ионного выпо.шения различных операций с радиоактивными и другими вредными жидкими веП1ествами по способу дистанционного пипетирования.
Этот недостаток в описываемых радиохимических гидроманипуляторах устранен тем, что они выполнены в виде подвижных в осевом направлении и поворотных вокруг своей оси трубчатых стержней, разделенных на части шарнирным соединением с рзчной тягой. Эти части, устанавливаемые нод требуемым углом одна к другой, снабженные расположенным в его внутренней полости шлангопротяжным роликовым механизмом с вращаемыми рукоятью ведущими роликами, предназначены для перемещения и фиксирования шприца-пипетки. Кроме того, с трубчатым стержнем скреплено насосно-раснределительное устройство, состоящее из дозированного пульта со ширипамн-дозаторами, распределительного крапа, переходного крана и соединительных шлангов.
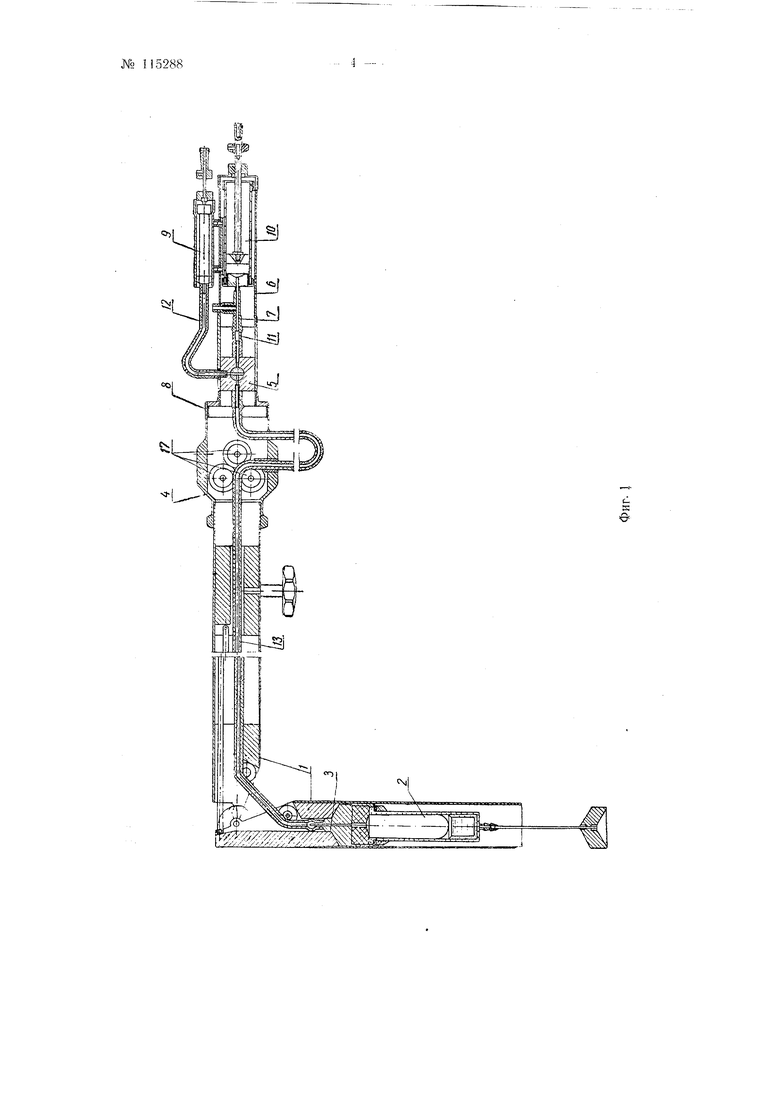
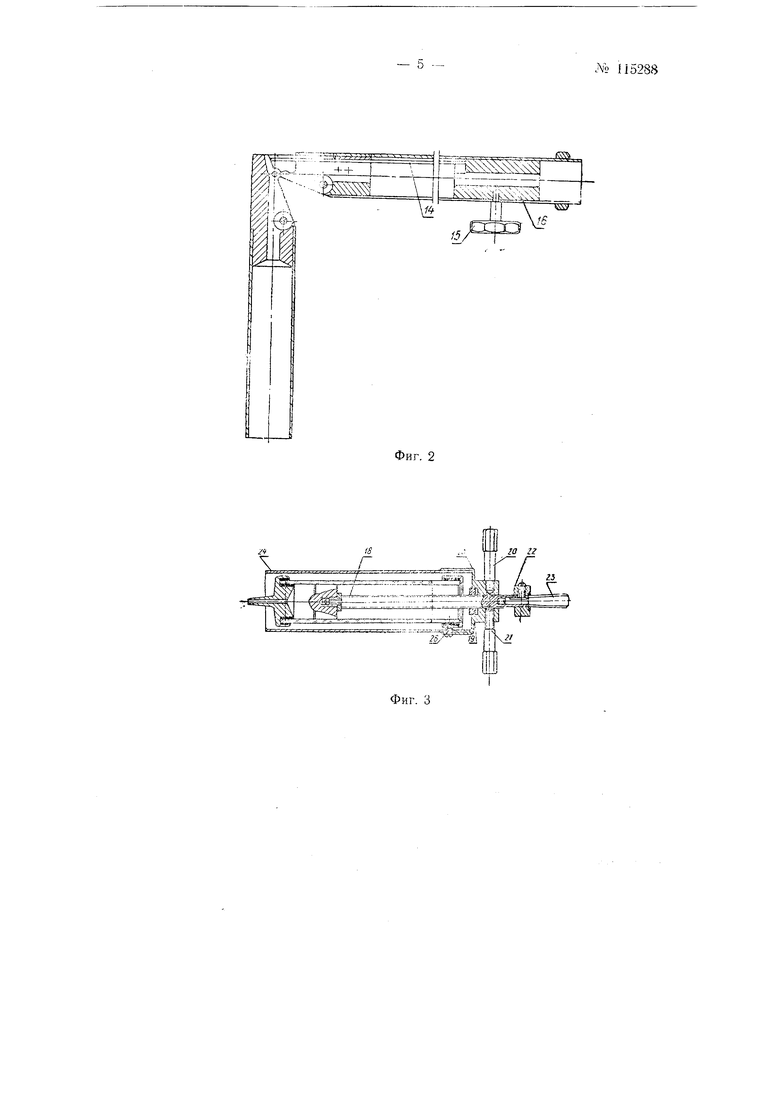
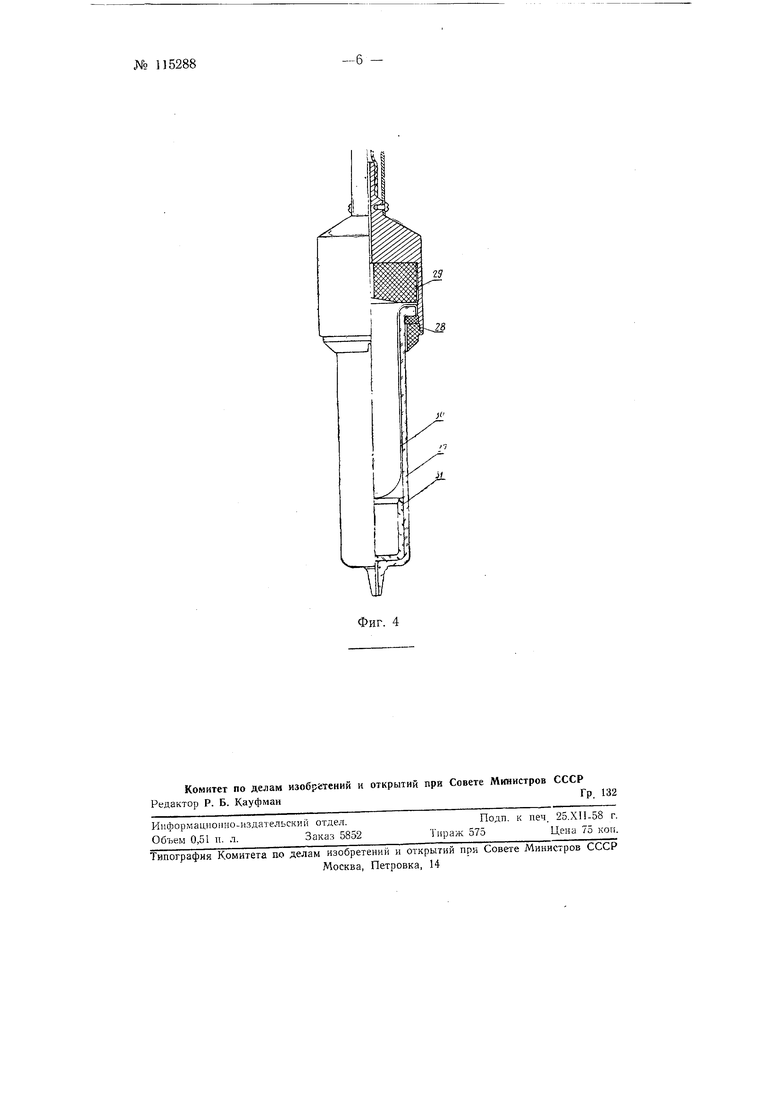
На фиг. 1 изображен общий вид гидроманипулятора в продо.льном разрезе; на фиг. 2 - устройство шарнирного трубчатого механизма; на фиг. 3 - устройство щприца-дозатора; на фиг. 4 - устройство н прицапинетки.
Гидроманипулятор-(фиг. 1) состоит из шарнирного трубчатого механизма /, шприца-пипетки 2, наконечника 3, шлангопротяжного роликового мехапизма 4 распределительного трехходового крана 5, дозировочного двухшприцевого пульта 6, тройника 7, переходника 8, шприцев-дозаторов 9 и JO к соединительных шлангов //, 12, 13.
Конструктивно узлы и детали с 5 по 13 включительно образуют в целом насосно-раснреде чительный механизм манипулятора. Они же в сочетании со шприцем-пипеткой 2 образуют измерительно-дозировочный пневмогидравлический механизм манипулятора.
Шарнирный трубчатый механизм (фиг- 2) состоит из трубчатого стержня круглого поперечного сечения с дистанционно управляемым шарJ b ; 15288
мирным соединением, деляшим стержень на две части. Дистанционное измеиение и фиксированне угла между обеими частями стержня, )асноложенными по разные стороны uiapiiHpa, осуществляется 1ларнирной тягой 14 за счет соответствуюн 1его перемещения и закрепления винтом /.5 втулки 16. Втулка 16 одновременно выполняет роль защитно-герметизирующей пробки для внутреннего канала горизонтальной части трубчатого стержня манипулятора.
Шлангопротяжный роликовый механизм 4 (фиг. 1) предназначен для перемещения и фиксирования шприца-пипетки 2 по высоте, за счет изменения длины гибкого соединительного ишанга 13 между шприцемпипеткой и роликами механизма.
Шлангопротяжный механизм --остоит из полого цилиндрического корпуса и шести полуроликов 17, попарно расположенных на трех параллельных между собою осях внутри корпуса. Пары полуроликов образуют регулируемые направляющие канавки для шланга углового профиля. Концы осей парных полуроликов расположены в регулировочных подшипниковых винтах. Посредством этих винтов регулируют как расстояние между полуроликами в каждой паре, так и взаимное расположение юликовых пар.
Насосно-расиределительный механизм (фиг. 1) манипулятора предназначен для заполнения, удержания и сливания жидкостей из шприцапипетки требующимися дозами.
Шприцы-дозаторы (фиг. 3) типа «Рекорд снабжены в отличие ог обычного медицинского инъекционного шприца, винтовым и врашающимся относительно поршня штоком 18, а также фрикциониоупорной конусообразной гайкой 19, стопорными винтами 20 и 21, боль1ПОЙ головкой 22 и малой головкой 23.
Шприц заключен в металлическую трубку-кожух 24 с головкой 25 и застопорен против вращения вокруг своей оси и перемещения вдоль нее цапфовым винтом 26 таким образом, чтобы сохранить возможность некоторого качания и смещения относительно трубки кожуха и винтового штока 18.
Медленное вращение njTOKa 18 осуществляется вручную большой головкой 22. Быстрое вращение - меньи1ей головкой 23. Она выполнена легкосъемпой для удобства удалепия при необходимости и при спепяальном использовании щприца-насоса, например в случаях автоматических режимов подачи жидкостей и газов за счет подключения к Н1току вала синхронного электродвигателя.
Трехходовой распределительный кран 5 (фиг. 1) предназначен для поочередного или совместного подключения шприца-пипетки 2 к шприцамдозаторам 9, и 10 дозировочного пульта 6, а также отключения порозень или одновременно шприца-пинетки от шприцев-дозаторов. Тройник 7 предусмотрен для соединения пневмогидравлической системы манипулятора с атмосферой и внешними емкостями с жидкостями, а также со шприцами-дозаторами 9 н 10 при отсутствии распределительного крана 5. Переходник 8 соединяет шлангопротяжной и насоснораспределительный механизмы.
Шприц-пипетка 2 (фиг. 4) представляет собою цельностеклянный шприц с укороченным поршнем. Корпус 27 шприца прикреплен гайкой к головке 28. При работе с химическими агрессивными и гамма-активными жидкостями способом гидравлического пипетирования, между прокладкой 29 и разбортовкой корпуса шприца закрепляется резиновая или пластикатная гладкостенная или гофрированная оболочка 30, служащая дополнительно к поршню 3 шприца подвижным непроницаемым разделителем между рабочей и управляющей жидкостями.
Наконечник 3 (фиг. Г) шприца-пипетки 2 нредназиачеи для подключения к емкостям с рабочими средами и забирания нли сливания через него требующихся доз жидкостей. Наконечник используется для узкогорлых ампул, особенно ири растворении в них порошкообразных н спекшихся .радиоактивных препаратов, во избежание образования весьма опасных аэрозолей, неизбежно возникаюшнх при пересыпании или размельчении препаратов.
В качестве всасываюш,е-сливных наконечников применяются стандартные иглы различных диаметров и ллнн. а также из нержавеюш,ен .тали и иглы BorjHia.
Конструктивными видоизменениями (модификациями) основного гидроманипулятора являются: а) стационарный гндроманипулятор, б) стационарный гидродозатор и в) ручной угловой фасователь-пробоотборник.
Стационарный гидроманипулятор представляет собой измерительнодозировочное пнсвмогидравлическое устройство, в котором иасосно-)аспределительный механизм и шприц-нипетка скомплектсваны с одним из известных манипуляторов, предназначенных для дистанционной работы с радиоактивными венхествами (например, с так называемым П-образным манипулятором тина «механических рук).
Стационарный гидродозатор состоит из измерительно-дозировочного механизма основного стационарно-ручного гидроманипулятора, но с неподвижно закрепленным шприцем-пипеткой и предназначен только для отмеривания жидкостей но объему без их перемешения.
В допо.шение к имеюп емуся ручно.му управлению дс знровочный пзльт гид1;одозатора легко может быть снабжен электромеханнческим приводом, предназначенным для осущест зления определенных автоматических режн.мов подачи жидкостей и газов.
Ручной угловой фа;;ователь-пробоотборник предназначен для выполнения работ вспомогательного характера, проводимых преимуплествеино в открытых условиях.
Фасователь-пробоотборник состоит, в основном, из жесткой разиоплечей Г-образной трубкн, к короткому плечу которой крепится шприц-пипетка, а к открытол1у копцу длинного плеча-дозировочный пульт с распределительным краном или тройником, нли только одни шприц-дозатор требуюшейся емкости. Соедините.тьпый размен1ается внутри Г-об 5азной трубки.
Радиохимические гидромаьн1иуляторы, п|зедназначенные для дистанционного в)толнення дозированного отмеривания, фасовки различных емкостей, в частности, ампул, и других операций с радиоактивными и различными вредными для здоровья жидкими веществами, с при.менением зан итных камер, вытяжных шкафов или предохранительных экранов с вынесенными 11аружу органами управления, приводимыми в действие вручную, о т л н чающиеся тем, что, с целью выпо.чиения различных радиотехнологических операций по способу дистанционного пипетирования, они вьшолиены в виде подвижного в осевом направлении и поворотного вокруг своей оси трубчатого стержня, разделенного шарнирным соединением с ручной тягой на части, устаналиваемые под требуемым углом одна к другой, и снабженного распо.1оже1;нь:м i; егс внутренней полости шлангопротяжным роликовым механизмом с вращаемыми рукоятью ведущими роликами, предназначенным для перемещения и фиксирования шприцапипетки, а также скрепленным с трубчатым стержнем насосно-распределительным устройством, состоящим из дозировочного пульта ;со шприцами-дозаторами, распределительного крана, переходника и соединительных тнлангов.
Лу 11 Я2нЯ
Н р е д м е т и з о б ) е т е н и я .
-о


| название | год | авторы | номер документа |
|---|---|---|---|
| Шприц-пипетка к радиохимическим манипуляторам | 1958 |
|
SU115280A1 |
| Манипулятор для дистанционной работы с радиоактивными жидкостями в защитной камере | 1958 |
|
SU119869A1 |
| ПНЕВМОМАНИПУЛЯТОРЫ ДЛЯ ДИСТАНЦИОННОГО ВЫПОЛНЕНИЯ ОПЕРАЦИЙ | 1957 |
|
SU110193A1 |
| Манипулятор Самохвалова для запайки и вскрытия ампул | 1959 |
|
SU140536A1 |
| УСТРОЙСТВО для ВВЕДЕНИЯ РАДИОАКТИВНЫХ РАСТВОРОВ В ЛИФМАТИЧЕСКУЮ СИСТЕМУ | 1972 |
|
SU329894A1 |
| Установка с радиотехническим манипулятором | 1958 |
|
SU115086A1 |
| Устройство для дезинфекции иглы и кожи при инъекциях птицам и животным | 1960 |
|
SU133559A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВКИ КОЛБАСНЫХ ИЗДЕЛИЙ | 1970 |
|
SU272833A1 |
| Лабораторный автоклав | 1935 |
|
SU49474A1 |
| ДОЗАТОР ЖИДКОСТЕЙ | 1973 |
|
SU362198A1 |
.L..., ...i,., В;х
га гг
гз
:::::::гп::;м|
- nfwlW W Haf
