Изобретением являются пневмоманипуляторы для дистанционного выполнения операций, связанных с применением радиоактивных препаратов.
Предлагаемые пневмоманипуляторы отличаются использованием замкнутой пневматической системы в сгибающемся под разными углами механизме и состоят из пневмозахвата и насосно-распределительной системы, расположенных по концам соединяющего их гибкого шланга в шарнирном трубчатом механизме, в котором перемещение и фиксирование пневмозахвата осуществляется при помощи шлангопротяжного роликового механизма.
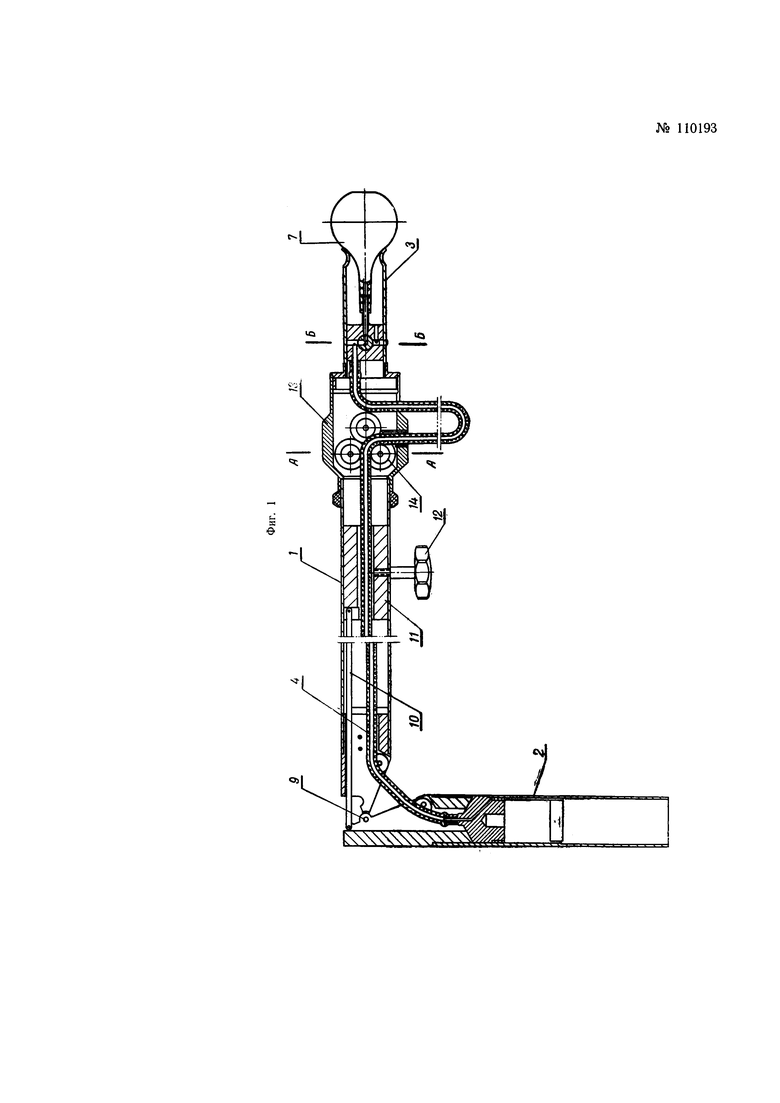
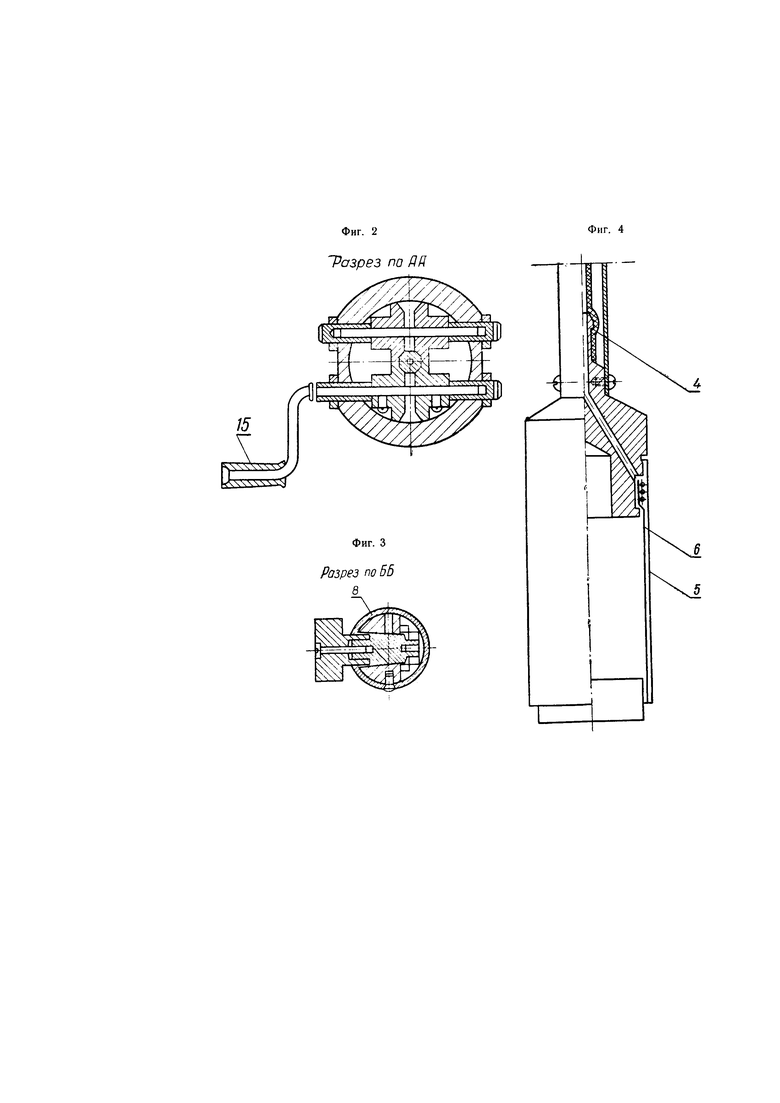
На фиг. 1 изображен вид пневмоманипулятора в продольном разрезе; на фиг. 2 - разрез по АА на фиг. 1; на фиг. 3 - разрез по ББ на фиг. 1; на фиг. 4 - разрез пневмозахвата.
В шарнирном трубчатом механизме 1 монтированы пневмозахват 2 и насосно-распределительная система 3, расположенные по концам соединяющего их гибкого шланга 4.
Пневмозахват 2 выполнен в виде металлического стакана 5, внутри которого имеется резиновая оболочка 6, выстилающая его внутреннюю поверхность. Нагнетанием или отсасыванием воздуха в пространство между металлическим стаканом и резиновой оболочкой достигается фиксация или высвобождение радиоактивного материала.
Наличие резиновой оболочки обеспечивает прочную фиксацию препарата и, вместе с тем, не подвергает последний неравномерному давлению, которое создавало бы опасность для его целостности.
Насосно-распределительная система 3 состоит из резинового баллона 7 грушевидной формы и распределительного крана 8. Сжиманием или расправлением баллона 7 повышается или понижается давление в пневмозахвате 2 и, тем самым, осуществляется соответственно фиксация или высвобождение предмета манипуляции, в частности, радиоактивного препарата.
При подготовке манипулятора к работе в насосно-распределительной системе создается некоторое разряжение воздуха, которое достигается тем, что пробка крана 8 повертывается на 90° по часовой стрелке, против положения, указанного на чертеже, а баллон 7 несколько сжимается.
Часть воздуха из пневмосистемы уходит в атмосферу, после чего пробка распределительного крана 8 ставится в прежнее положение. При сжимании баллона в этом положении пробки крана стенки резиновой оболочки 6 пневмозахвата 2 прогибаются внутрь стакана до соприкосновения с препаратом за счет создания давления воздуха внутри пневмосистемы, происходящего при уменьшении объема баллона.
При повороте пробки крана 8 на 90° против часовой стрелки, препарат останется закрепленным в пневмозахвате 2 до следующего поворота пробки крана по часовой стрелке на тот же угол.
Шарнирно-трубчатый механизм 1 позволяет придавать прибору различную форму от прямой до Г-образной и состоит из двух трубчатых стержней, соединенных между собой шарниром 9.
Дистанционное изменение и фиксирование угла между стержнями, расположенными по разные стороны шарнира 9, достигается при помощи шарнирной тяги 10 за счет соответствующего перемещения втулки 11, зацепляемой винтом 12.
Шлангопротяжный роликовый механизм помещен в полом цилиндрическом корпусе 13 и состоит из трех роликов 14, расположенных на трех параллельных между собой осях.
Перемещение и фиксирование пневмозахвата 2 осуществляется за счет изменения длины гибкого соединительного шланга 4 на участке между пневмозахватом 2 и роликами 14, путем вращения последних с помощью рукоятки 15, после чего ролики фиксируются одним из известных способов.
Описанный пневмоманипулятор предназначен для стационарного использования в защитных камерах. Общая длина прибора может достигать нескольких метров, что обеспечивает дистанционное управление манипуляциями и создает достаточную безопасность для персонала.
Ручные угловые пневмозахвата отличаются более простым устройством, принципиально аналогичным описанному манипулятору, и предназначены в основном для перемещения препаратов из одного защитного устройства в другое.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоманипулятор для дистанционного выполнения операций | 1973 |
|
SU465320A1 |
| Радиохимические гидроманипуляторы | 1957 |
|
SU115288A1 |
| Манипулятор для дистанционной работы с радиоактивными жидкостями в защитной камере | 1958 |
|
SU119869A1 |
| ПОДВОДНЫЙ ТАНКЕР | 1993 |
|
RU2062731C1 |
| Манипулятор | 1989 |
|
SU1657370A1 |
| Оросительная система | 1990 |
|
SU1741670A1 |
| Устройство для очистки вертикальныхпОВЕРХНОСТЕй | 1978 |
|
SU814329A1 |
| ГАММА-ДЕФЕКТОСКОП | 1967 |
|
SU206137A1 |
| ПРОМЫВОЧНО-СПУСКНОЕ УСТРОЙСТВО ДЛЯ ТУАЛЕТА (ВАРИАНТЫ) И РЕЗИНОВЫЙ ЗАТВОР ДЛЯ НЕГО | 2004 |
|
RU2274570C1 |
| СИСТЕМА ДЛЯ ОХЛАЖДЕНИЯ СТЕКЛЯННОЙ ПОСУДЫ, СНАБЖЕННАЯ УСТРОЙСТВОМ ДЛЯ УДАЛЕНИЯ ЖИДКОЙ УГЛЕКИСЛОТЫ | 2009 |
|
RU2496065C2 |
Пневмоманипуляторы для дистанционного выполнения операций, связанных с применением радиоактивных препаратов, отличающиеся использованием замкнутой пневматической системы в сгибающемся под различными углами механизме и состоящие из пневмозахвата и насосно-распределительной системы, расположенных по концам соединяющего их гибкого шланга в шарнирном трубчатом механизме, в котором перемещение и фиксирование пневмозахвата осуществляется при помощи шлангопротяжного роликового механизма.
