СП
сл
ч1
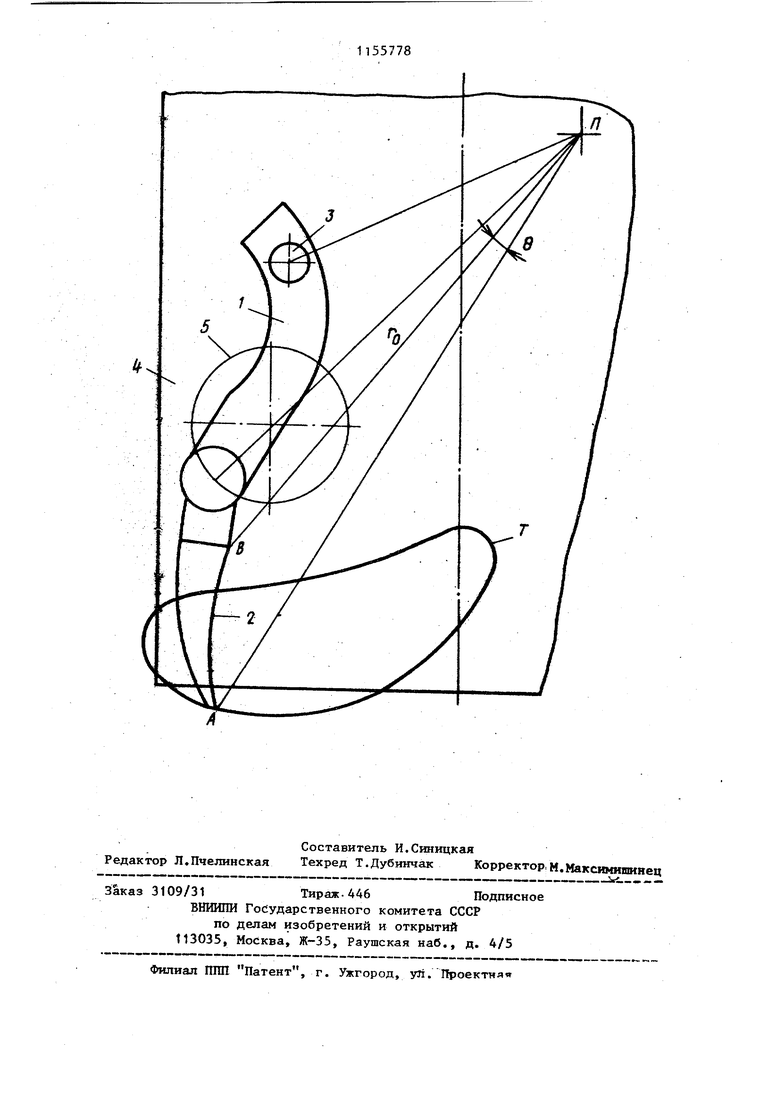
ос Изобретение относится к погрузочным машинам, конкретнее к .погру зочным рабочим органам с нагребающими лапами, Известен рабочий орган с нагребаю1цими лапами, содержащий корпус с гребком и привод tij. Наиболее близок к предлагаемому погрузочный орган бокового захвата С2J, содержащий корпус с гребко профиль рабочей поверхности которо выполнен по уравнению логарифмичес кой спирали где I - радиус кривизны спирали; Гд - начальный радиус спирали, показатель спирали; С - полярньй угол. Недостатком известных погрузочных органов являются большие потери энергии на трение гребка о штабели материала. Цель изобретения - снижение эне гоемкости погрузки путем снижения потерь на трение при заглублении гребка в штабель материала. Поставленная цель достигается тем, что в погрузочном органе бокового захвата, содержащем корпус с гребком, профиль рабочей поверхности которого вьшолнен по уравнению логарифмической спирали где г - радиус кривизны спирали; TO начальный радиус спирали, 1с - показатель спирали Ч - полярный угол, полюс спирали находится в мгновенном центре вращения гребка при мак симальном удалении носка гребка от оси его вращения в сторону забоя, при этом начальный радиус спирали равен длине отрезка, соединяющего полюс спирали и переднюю точку корпуса гребка, а значение показателя спирали определяется из выражения , где f - угол трения материала о гребок. На чертеже изображена схема погрузочного органа бокового захвата, вид в плане. Погрузочный орган состоит из корпуса лапы 1 с закрепленньм в ней гребксж 2, рабочая поверхность которого выполнена по уравнению логарифмической спирали .., ,.. cto- р у е ° Хвостовая часть корпуса лапы 1 взаимодействует с ползуном 3, которьй закреплен на питателе (раме)-4. При работе погрузочный орган приводится в движение посредством кривошипного диска 5, при этом конечная точка А гребка 2 описывает замкнутую траекторию Т. Полюс спирали находится в мгновенном центре вращения П. Величина начального радиуса г определяется расстоянием от точки П До передней точки В корпуса лапы 1.. Показатель К спирали определяется из выражения .где рр - угол трения материала о гребок. Погрузочный орган работает сле-т дующим образом. При движении лапы на участке траектории Т, Соответствующем ее максимальньму заглублению, происходит беспрепятственное скольжение груза вдоль рабочей поверхности гребка. Применение изобретения снижает энергоемкость погрузки материала на конвейер,.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
| Погрузочный орган | 1989 |
|
SU1709120A1 |
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| Рабочий орган погрузочной машины | 1982 |
|
SU1051324A1 |
| Рабочий орган погрузочной машины | 1981 |
|
SU994777A1 |
| Погрузочная машина | 1982 |
|
SU1067226A1 |
| Погрузочный орган горной машины | 1984 |
|
SU1218149A1 |
| Погрузочный орган непрерывного действия | 1978 |
|
SU685841A1 |
| Рабочий орган погрузочной машины | 1990 |
|
SU1795122A1 |
ПОГРУЗОЧНЫЙ ОРГАН БОКОВОГО ЗАХВАТА, включающий корпус с гребком,, профиль рабочей поверхности которого выполнен по уравнению логарифмической спирали. Ч 1, где - радиус кривизны спирали; Г - начальный радиус спирали , 1 - показатель cпиpaлиi - полярный угол, отличающийся тем, что, с целью снижения энергоемкости погрузки путем снижения потерь на трение при заглублении гребка в штабель материала, полюс спирали находится в мгновенном центре вращения гребка при максимальном удалении носка гребка от оси его вращения в сторону забоя, при этом начальньй радиус спирали -д равен длине отрезка, соединяющего полюс спирали и переднкно точку корпуса гребка, а значение показателя спирали опресл деляется из выражения t-%fo (где - угол трения материала о гре.бок) .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гурков К.С | |||
| и др | |||
| Погрузочные машины для сыпучих и кусковых материалов | |||
| М., Машгиз, 1962, с | |||
| Способ защиты от окалины изделий из нержавеющих сталей | 1959 |
|
SU126128A1 |
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
