Изобретение относится к погрузочным машинам, конкретнее к рабочим органам с загребающими лапами.
Известен рабочий орган погрузочной машины, включающий наклонную плиту и шарнирно установленные загребающие лапы с приводом от гидроцилиндра, соединенного с ползуном, связанным с вторым гидроцилиндром 11.
Наиболее близким техническим решением к изобретению является рабочий орган погрузочной машины, включающий наклонную плиту, направляющие лапы с гребками и хвостовыми частями, соединенными с гидроцилиндрами С2.
НедостаткоМ известных рабочих органов является сложность конструкции и управления движением лап.
Цель изобретения - повы1иение надежности, Эта цель достигается тем, что в рабочем органе погрузочной майшны,. включающем наклонную плиту, установ.ленные на н,ей нагребающие лапы с гребками и хвостовыми частями,: соединенными с гидроцилиндрамн, хвостовая часть каждой нагребающей лапы выполнена по дуге окружности, а наклонная плита снабжена роликоопорами, устаг .
новленными с возможностью размеадения в пазгх нагребающих лап. 1
При этом роликоопорм устаиовлены с возможностью перестановки и фиксации по радиусу дуги окружности пазов нагребающих лап.
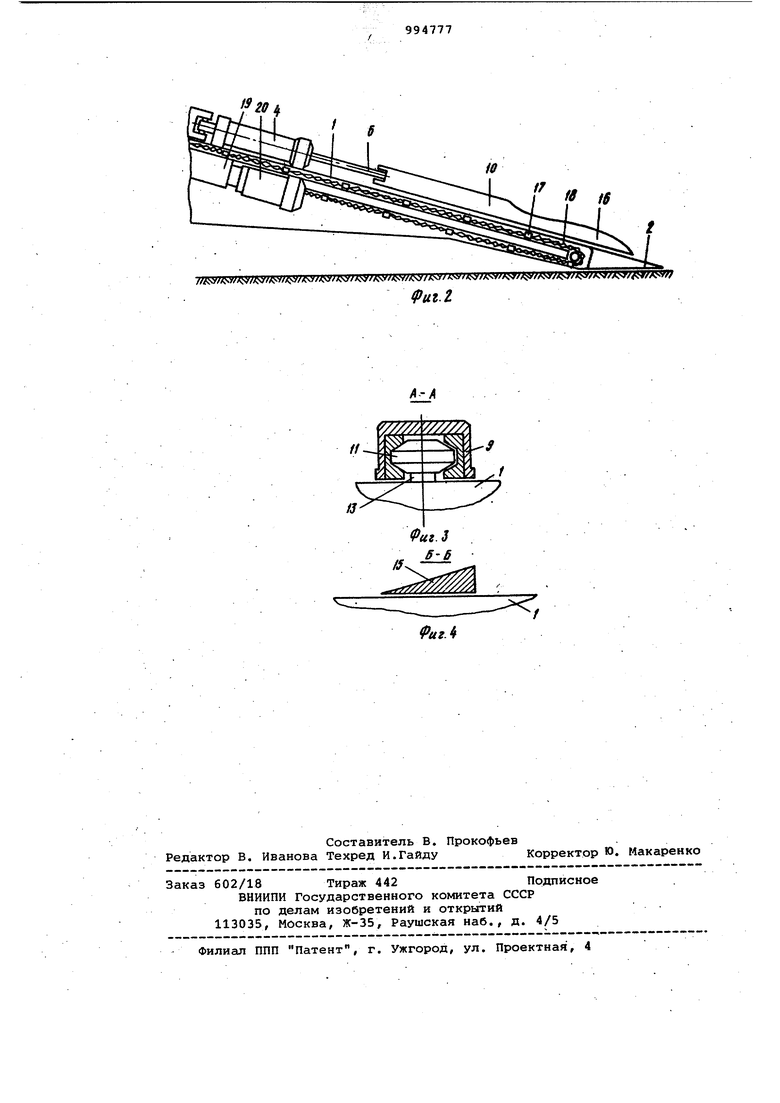
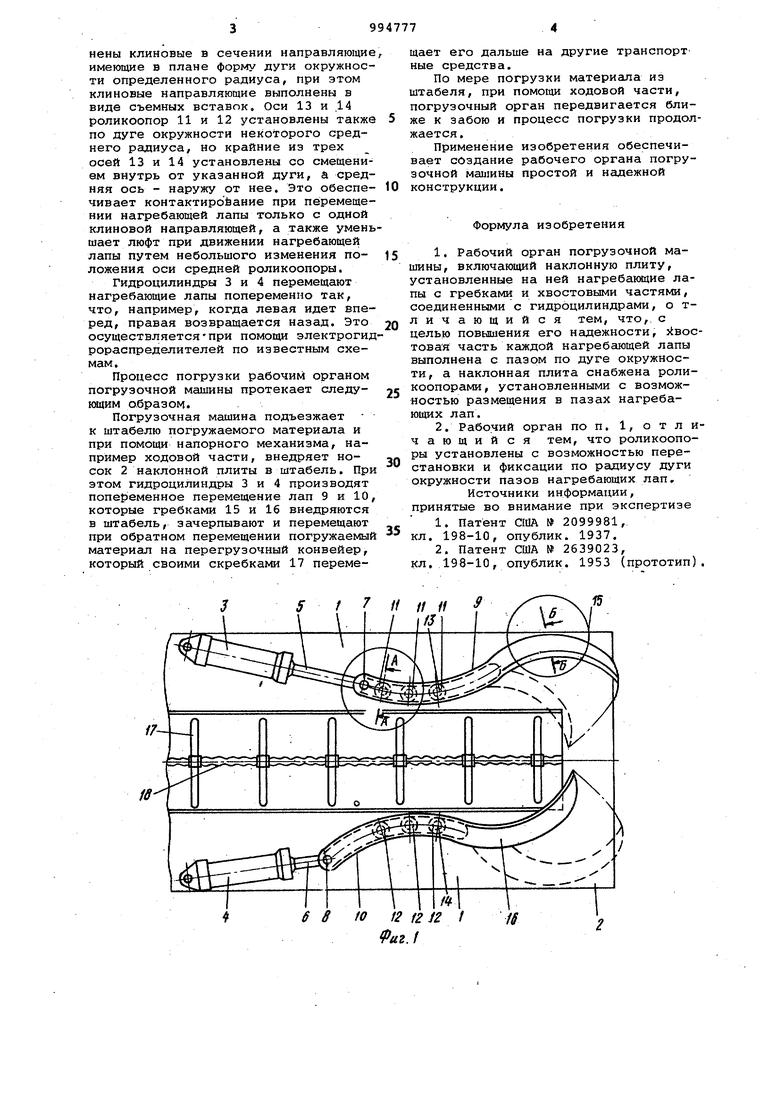
На фиг.. 1 изображен рабочий орган, вид в плане; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечение А-А на
10 фиг. 4 - сечение В-Б на фиг. 1.
Рабочий орган состоит из наклонной плиты 1 с носком 2 в передней ее части. На плите 1 установлены гидроцилиндры 3 и 4, штоки которых со15ответственно 5 и 6 соединены при помощи пальцев 7 и 8 с хвостовыми час тями нагребающих лап 9 и 10, которые могут перемещаться относительно трех роликоопор 11 и 12, установленных
20 на неподвижных осях 13 и 14. В передней части нагребающие лапы 9 и 10 оканчиваются серповидными в плане и клиновыми в сечении гребками 15 н 16. В средней части наклонной плиты 1
25 перемещается перегрузочный конвейер со скребками 17, тяговой цепью 18 через редуктор 19, получающий, вращение от электродвигателя 20.
Во внутренней части хвостовых
30 частей нагребающих лап 9 и 10 выпол- йены клиновые в сечении направляющие имеющие в плане форму дуги окружности определенного радиуса, при этом клиновые направляющие выполнены в виде съемных вставок. Оси 13 и 14 роликоопор 11 и 12 установлены также по дуге окружности некоторого среднего радиуса, но крайние из трех осей 13 и 14 установлены со смещением внутрь от указанной дуги, а средняя ось наружу от нее. Это обеспечивает контактирование при перемещении нагребающей лапы только с одной клиновой направляющей, а также умень шает люфт при движении нагребающей лапы путем небольшого изменения положения оси средней роликоопоры. Гидроцилиндры 3 и 4 перемещают нагребающие лапы попеременно так, что, например, когда левая идет вперед, правая возвращается назад. Это осуществляетсяпри помощи электрогид рораспределителей по известным схемам. Процесс погрузки рабочим органом погрузочной машины протекает следующим образом. Погрузочная машина подъезжает к штабелю погружаемого материала и при помощи напорного механизма, например ходовой части, внедряет носок 2 наклонной плиты в штабель. При этом гидроцилиндры 3 и 4 производят попеременное перемещение лап 9 и 10 которые гребками 15 и 16 внедряются в штабель, зачерпывают и перемещают при обратном перемещении погружаемый материал на перегрузочный конвейер, который своими скребками 17 переме6В 10 12 12 iZ / 7 // fuz.f щает его дальше на другие транспорт ные средства. По мере погрузки материала из штабеля, при помощи ходовой части, погрузочный орган передвигается ближе к забою и процесс погрузки продолжается. Применение изобретения обеспечивает создание рабочего органа погрузочной машины простой и надежной конструкции. Формула изобретения 1.Рабочий орган погрузочной машины, включающий наклонную плиту, установленные на ней нагребающие лапы с гребками и хвостовыми частями, соединенными с гидроцилиндрами, о тли чающийся тем, что,, с целью повышения его надежности, з4востовая часть каждой нагребающей лапы выполнена с пазом по дуге окружности, а наклонная плита снабжена роликоопорами, установленными с возможностью размещения в пазах нагребающих лап. 2.Рабочий орган по п. 1, отличающийся тем, что роликоопоры установлены с возможностью перестановки и фиксации по радиусу дуги окружности пазов нагребающих лап. Источники информации, принятые во внимание при экспертизе 1.Патент СМА 2099981, кл. 198-10, опублик. 1937. 2.Патент США № 2639023, КЛ. 198-10, опублик. 1953 (прототип). IS
/WNl w WУ t v/л i / y/л yA y/A y/A y/ c v/л o/ J/A. 18
Фиг.1 fS
| название | год | авторы | номер документа |
|---|---|---|---|
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 2014 |
|
RU2560013C1 |
| Погрузочный орган горной машины | 1983 |
|
SU1145161A1 |
| Погрузочный орган | 1989 |
|
SU1709120A1 |
| Погрузочный орган непрерывного действия | 1981 |
|
SU983285A1 |
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
| Рабочи орган погрузочной машины | 1989 |
|
SU1686187A1 |
| Рабочий орган погрузочной машины | 1981 |
|
SU1010295A1 |
| Погрузочный орган бокового захвата | 1982 |
|
SU1155778A1 |