Изобретение относится к горному оборудованию, в частности, к рабочим органам шахтных погрузочных машин, и может быть применено в горнодобывающей, угольной, строительной и других отраслях промышленности,
Известен рабочий орган погрузочной машины с механизмом выравнивания тра- .ек тории гребка, включающий шарнирно соединенные между собой стрелу, универсальное звено, рукоять, гребок с кронштейном, тягу и силовые цилиндры привода стрелы, рукояти и гребка. Вместо тяги могут использоваться два гидроцилиндра, полости которых соединены между со- бс-й. Недостатком конструкции является то, чтр выравнивание траектории гребка проис- постоянно, независимо от высоты на- хо ждения гребка над поверхностью почвы. В результате, при работе на толстом слое материале, когда гребок не достает до основания, происходит уменьшение объема захвата материала. .
Наиболее близким техническим решением является рабочий орган шахтной погрузочной машины, закрепленный на конвейере и включающий стрелу, рукоять, гребок с кронштейном, силовые цилиндры привода стрелы, рукояти и гребка, а также устройство для выравнивания траектории гребка, состоящее из насос-цилиндра, установленного между кронштейном гребка и рукоятью, пилот-цилиндра и рычагов, установленных на конвейере.
Цилиндр стрелы служит для ее подъема и опускания при выполнении, рабочих операций цикла погрузки, а пилот - цилиндр - для корректировки положения стрелы в зависимости от положения гребка. В прототипе предусмотрена возможность регулировки уровня траектории гребка относительно поверхности почвы. В первом варианте прототипа это достигается введечг
S0
ГО Ю
нием регулируемого упора стрелы, а во втором варианте - введением регулируемых концевых выключателей и связанных с ними гидравлических распределителей.
Недостатком прототипа является сложность конструкции механизма выравнивания траектории гребка и устройства для регулировки уровня траектории гребка относительно поверхности почвы, а также сложность самого процесса этой регулировки, т;е :упщвления рабочим органом.
;... Цель изрбретения - упрощение конструкции рабочего органа и управления им.
Поставленная цель достигается тем, что в рабочем органе погрузочной машины, включающем шарнирно соединенные стрелу, рукоять, гребок с кронштейном, силовые цилиндры привода стрелы, рукояти и гребка и насос - цилиндр, соединяющий кронштейн гребка с рукоятью, одна из полостей насос-цилиндра соединена с одной из полостей цилиндра стрелы. Линия, их соединяющая, снабжена :гидравлическим распределителем. В результате функции подъема - опускания стрелы при выполнении рабочих операций цикла погрузки и при корректировке ее положения с целью выравнивания траектории гребка, совмещены в одном цилиндре, а регулировка уровня траектории гребка осуществляется простым включением распределителя.
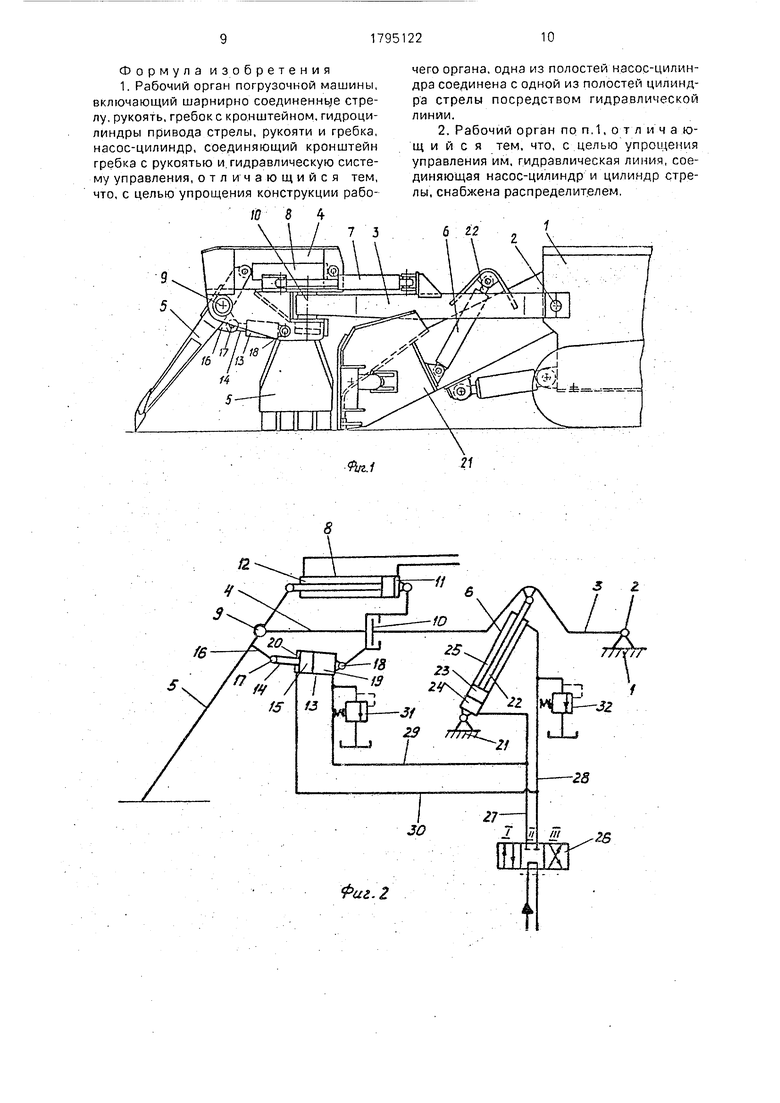
На фиг.1 изображен общий вид рабочего органа, вид сбоку; на фиг.2 - совмещенные кинематическая и гидравлическая схемы рабочего органа; на фиг.3-6 - варианты конструкции рабочего органа.
Рабочий орган погрузочной машины (фиг.1, 2) установлен на раме 1 посредством горизонтального шарнира 2 и состоит из шарнирно соединенных между собой стрелы 3, двух рукоятей 4, двух гребков 5 и силовых цилиндров б, 7, 8 привода стрелы, рукоятей и гребков соответственно. Дальнейшее описание выполнено применительно к одному гребку и рукояти, т.к. принцип действия второго гребка и рукояти идентичны. Также возможен вариантодногребково- го рабочего органа.
Гребок крепится к рукояти посредством горизонтального шарнира 9, а рукоять к стреле - с помощью вертикального шарнира 10. Поршень цилиндра 8 привода гребка образует в цилиндре поршневую 11 и штоковую 12 полости. Между гребком и рукоятью расположен насос-цилиндр 13, шток 14 которого одним концом.жестко связан с поршнем 15, а другим соединен с кронштейном 16 гребка шарниром 17. Корпус насос- цилиндра закреплен на рукояти посредством шарнира 18. Поршень 15 образует в цилиндре поршневую 19 и штоковую
20 полости. Корпус цилиндра 6 привода стрелы шарнирно соединен с конвейером
21 машины, а его шток 22 - со стрелой.
Другим концом шток 22 жестко связан с поршнем 23, который образует в цилиндре поршневую 24 и штоковую 25 полости. Управление цилиндром 6 осуществляется с помощью трехпозиционного распределителя
26, который гидравлической линией 27 соединен с поршневой полостью 24, а линией 28 - со штоковой полостью 25. Поршневые полости 19 и 24 цилиндров 13 и 6 соединены между собой линиями 29 и 27, а штоковые
полости 20 и 25 тех же цилиндров-линиями 30 и 28. Максимальное давление в этих линиях и полостях цилиндров, к которым они подключены, регулируется с помощью предохранительных клапанов 31 и 32.
в исходном положении (фиг.1) носок конвейера 21 опущен на почву, гребок 5 максимально выдвинут вперед и также отпущен -на почву. Шток 14 насос-цилиндра. 13 выдвинут Лз корпуса. Распределитель 26 на
ходится в нейтральном положении, т.е. линии 27 и 28 перекрыты.
Устройство работает следующим образом..
После подачи рабочей жидкости в поршневую полость 11 цилиндра 8 поршень со штоком (не обозначены) получают поступательное движение, поворачивая гребок 5 вместе с кронштейном 16 относительно шарнира 9. При этом расстояние между
шарниром 17 кронштейна гребка и шарниром 18 рукояти сначала уменьшается, достигая минимального значения в положении, когда шарниры 9, 17 и 18 располагаются на одной прямой линии, а затем увеличивается
до максимального в конечной точке поворота гребка. В результате шток 14 с поршнем 15 совершают возвратно-поступательное движение в цилиндре 13, которое, вследствие перетекания жидкости из полости 19 в
полость 24 и обратно, сопровождается вынужденными перемещениями поршня 23 со штоком 22 в цилиндре 6 и соответствующими перемещениями вверх-вниз стрелы 3 путем ее поворота относительно шарнира 2. В
результате такой взаимосвязи элементов рабочего органа рабочая кромка гребка 5 перемещается по прямолинейной или близкой к ней траектории.
Включением распределителя 26 в позицию 1 производится подъем стрелы 3 (после окончания рабочего хода гребка), а в позицию III - опускание с внедрением гребков в- погружаемый материал (после заброса гребков вперед).
Поворотом рукояти 4 с помощью цилинра 7 изменяется ширина захвата рабочего ргана,
Недостатками рабочего органа являютя невозможность совмещения операций нагребания и внедрения с сохранением свойства выравнивания траектории гребка, т.к. в этом случае во время рабочего хода гребка распределитель 26 будет находиться в позиции III и рабочая жидкость из полости 19 насос - цилиндра перетечет в сливную магистраль, не оказав никакого воздействия на поршень 23; в результате уменьшится количество захваченного гребком материала, снизится производительность погрузки; сложность регулировки уровня траектории гребка относительно поверхности почвы; она может выполняться одним из способов, приведенных в прототипе, например с помощью регулируемых упоров стрелы; таким образом, в данном варианте рабочего органа этот недостаток прототипа не устранен.
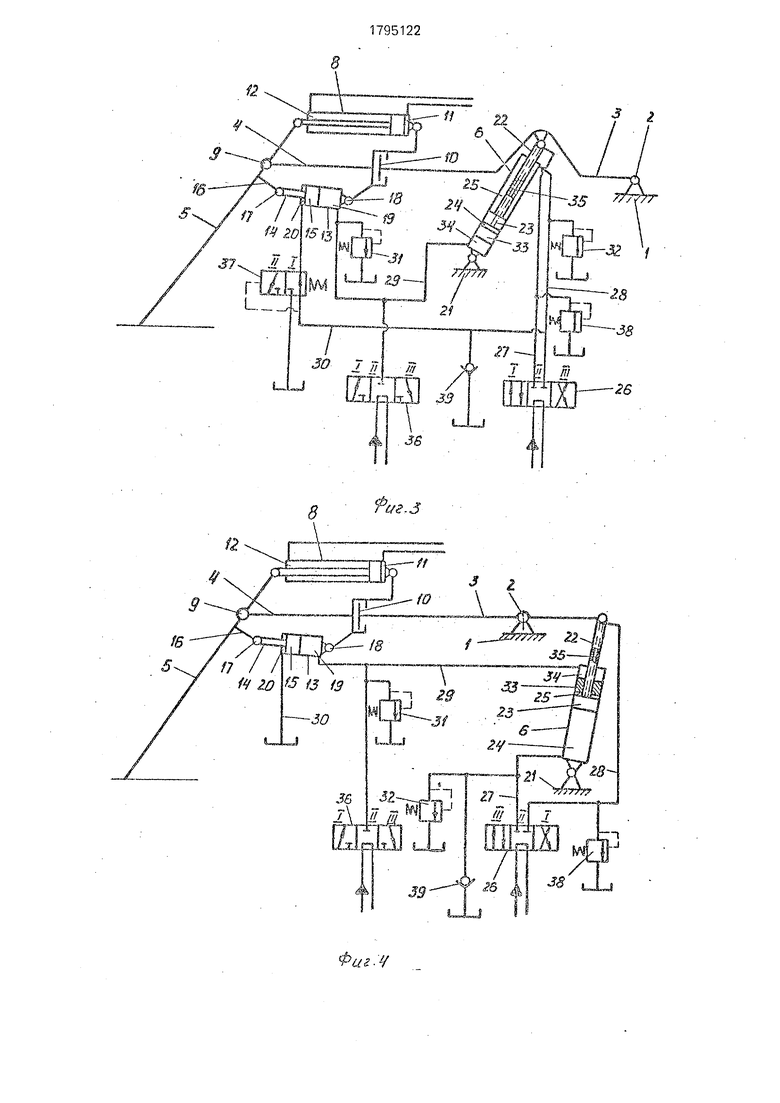
Перечисленные недостатки отсутствуют в рабочих органах, приведенных на фиг.З, 4 и 5. .
Рабочий орган .на фиг.З ртличзется от рассмотренного ранее тем, что в нем цилиндр 6 стрелы снабжен плавающим поршнем 33, образующим в цилиндре дополнительную поршневую полость 34. Шток 22 снабжен осевым каналом 35, по которому рабочая жидкость подается в полость 24, расположенную между поршнями. Дополнительная полость 34 соединена с поршневой полостью 19 насос-цилиндра 13 линией 29. К этой линии подключен трехпо- зиционный распределитель 36. В линию 30, соединяющую штоковые полости цилиндров 13 и 6, встроен двухпозиционный распределитель 37. Предохранительный клапан 38 подключен к линии 27. С помощью клапанов 31, 32 и 38 давление в полостях цилиндра 6 регулируется таким образом, чтобы в полости, соединенной с поршневой полостью 19 насос-цилиндра (в полости 34), создавалось наибольшее усилие на поршень, в полости, обеспечивающей прижатие рабочего органа вниз (в полости 25)- наименьшее усилие, а в полости, обеспечивающей подъем, рабочего органа (в полости 24) - промежуточное значение усилия. Полость цилиндра 6, служащая для прижатия рабочего органа вниз (полость 25) снабжена обратным клапаном 39.
Устройство работает следующим образом.. .
Жидкость, вытесняемая из полости 19 насос-цилиндра во время рабочего хода
гребка, нагнетается в дополнительную полость 34 цилиндра стрелы и приводит в дви- жение плавающий поршень 33. Распределитель 26 включен на прижатие
стрелы 3 вниз (в позицию III), т.е. одновременно с рабочим ходом гребка происходит его внедрение, которое сопровождается опусканием поршня 23 вниз, вплоть до его соприкосновения с плавающим поршнем
0 33. После этого поршни 23 и 33 перемещаются совместно в зависимости от перемещений поршня 15 насос-цилиндра. Для подъема стрелы в конце рабочего хода гребка распределитель 26 включается в позицию
5 in рабочая жидкость по линии 27 и каналу 35 в штоке 22 подается в полость 24. Поршень 23 поднимается вверх, а поршень 33 остается на месте.
Распределитель 37 предназначен для
0 устранения влияния давления в штоковой полости 25 на поршень. 15 насос-цилиндра в режиме совмещения операций нагребания и внедрения. При повышении давления в линии 28 до максимального распредели5 тель 37 включается в позицию II, соединяя штоковую полость 20 насос-цилиндра со сливом.. .
Распределитель 36 служит для регулировки уровня траектории гребка относи0 тельно поверхности почвы. Для подъема
траектории распределитель включается в
позицию I, рабочая жидкость поступает в
полость 34, поднимая поршни 23, 33 и весь
рабочий орган на необходимую величину.
5 Опускание траектории производится включением распределителя в позицию 111; под действием массы рабочего органа жидкость вытесняется из полости 34 в сливную маги1 страль и поршни 23, 33 опускаются на необ0 ходимую величину. Подпитка полости 25 жидкостью осуществляется через обратный клапан 39.
Функции корректировки положения
5 стрелы в зависимости от положения гребка и регулировки уровня траектории гребка могут выполняться с помощью полости 24, а функция рабочих операций подъема и опускания стрелы в цикле погрузки - с по0 мощью полости 34. Для этого полость 13 насос - цилиндра соединяется через канал 35 с полостью.24, а линия 27 подключается к полости 34, т.е. точки присоединения линий 27 и 29 к цилиндру 6 меняются местами.
5 Рабочий орган, приведенный на фиг.4, имеет следующие отличия от предыдущего варианта. Изменено на обратное взаимное расположение шарнира 2 крепления стрелы 3 к раме и шарнира крепления цилиндра 6 к стреле. Соответственно, подъем стрелы 3 производится втягивание штока 22 а цмлиндр 6, Плавающий поршень 33 расположен в штоковой полости цилиндра б, поэтому дополнительная полость 34 также является штоковой, а не поршневой, В полость 25 рабочая жидкость подается по осевому каналу 35 в штоке 22. Клапан 38 подключен к линии 28, а клапан 32 - к линии 27. при настройке предохранительных клапанов учитывается соотношение рабочих площадей поршня со стороны поршневой и штокавой полостей. Распределитель 37 исключен из схемы, линия 30 соединяет што- ковую полость. 20 насос-цилиндра со сливом, а подпитка полости 24 рабочей жидкостью при опускании стрелы и нейтральном положении распределителя 26 осуществляется через обратный клапан 39. В остальном устройство и принцип действия данного рабочего органа аналогичны предыдущему варианту, причем соединение линии 30 со сливной магистралью и под- ключение к полости цилиндра 6, обеспечивающей прижатие-стрелы 3 вниз, обратного клапана может использоваться и в рабочих органах, приведенных на фиг.2 и 3.
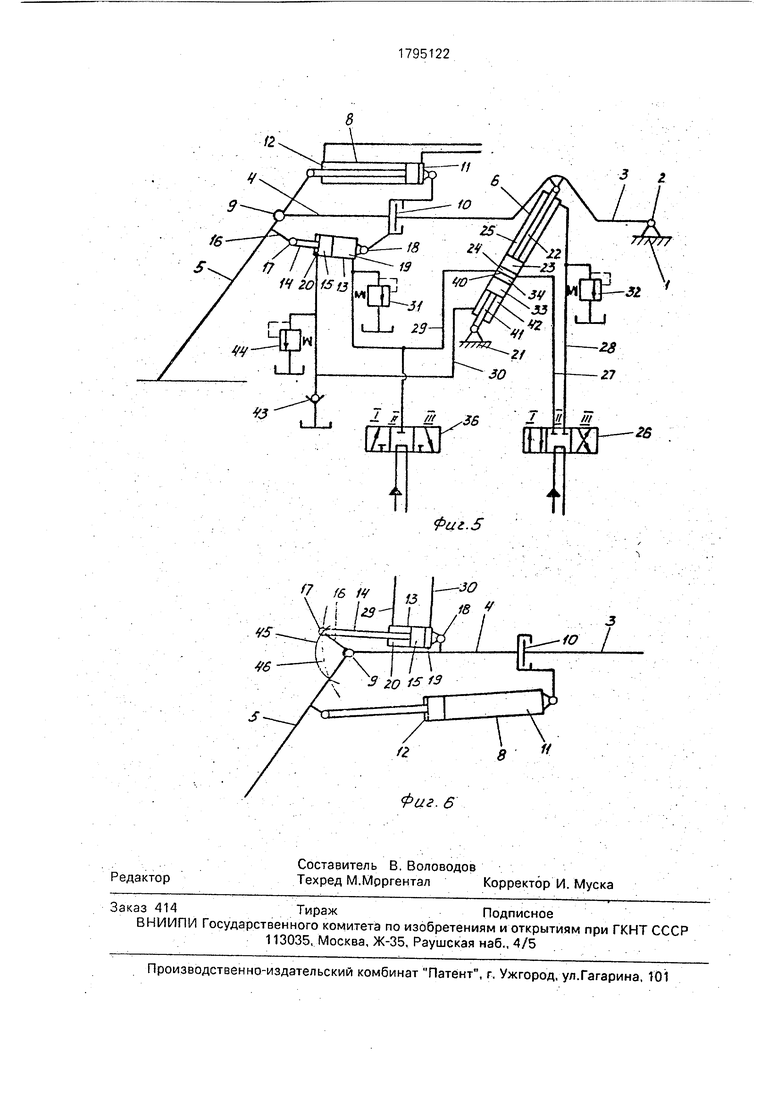
Конструкция цилиндра 6 может быть изменена, как это показано на фиг.5. Здесь .корпус цилиндра снабжен герметичной перегородкой 40, разделяющей его на две неравные части, каждая из которых представляет собой самостоятельынй цилиндр. Дополнительный поршень 33 снабжен штоком 41 и размещен в меньшем цилиндре с образованием штоковой полости 42. Этот цилиндр служит для выравнивания траектории гребка и регулировки ее уровня, Больший цилиндр служит для выполнения операций рабочего цикла. Линия 30 соединяет штоковые полости 20 и 42. Для компенсации утечек в этой линии в нее встроен обратный клапан 43, а для удаления избытка жидкости, например, при регулировке траектории гребка, подключен предохранительный клапан 44.
Такой сдвоенный цилиндр может быть встроен в конструкцию рабочего органа аналогично цилиндру 6 на фиг.4, где взаимное расположение шарнира 2 крепления стрелы 3 к раме и шарнира крепления цилиндра 6 к стреле 3 изменено на обратное. В этом случае подъем стрелы будет осуществляться посредством штоковых полостей 25 и 42 (фиг.5), а опускание - с помощью поршневых полостей 24 и 34. Соответственно, поршневая полость 19 насос-цилиндра будет соединена линией 29 со штоковой полостью 42, а штоковая полость 20 - с поршневой 34. Подъем стрелы будет производиться включением распределителя 26 в позицию 111, а опускание- в позицию I. В остальном устройство и работа механизма аналогичны приведенному на фиг.5. Главное отличие рабочего органа, фрагмент схемы которого показан на фиг.6, от предыдущих вариантов состоит в изменении характера взаимодействия гребка с насос-цилиндром, в связи с чем штоковая полость 20 приобретает функции поршневой, а поршневая полость 19 - функции штоковой, Для увязки данной схемы со схемами на фиг.2, 3, 4 и 5 изменены места подключения линий 29 и 30 к насос-цилиндру 13 в соответствии с их новыми функциями: линия 29 подключена к штоковой полости 20, а линия 30 к поршневой полости 19. ;.
При подаче рабочей жидкости в штоко- вую полость 12 цилиндра 8 гребок 5 поворачивается относительно шарнира 9 крепления к рукояти 4, совершая рабочий ход. Одновременно поворачивается и шарнир 17, который является общим для кронштейна 16 гребка и насос-цилиндра 13. Но
так как элементы кронштейна движутся по меньшему радиусу (дуга 45), а элементы насос-цилиндра - по большему (дуга 46), рабочий ход гребка сопровождается сначала выдвижением поршня .15 из цилиндра 13 с
вытеснением жидкости из штоковой полости 20, а затем обратным ходом поршня. Данный вариант может использоваться в любом из приведенных на фиг.2, 3. 4 и 5 рабочих органов.
Таким образом, приведенные варианты рабочего органа обеспечивают выполнение поставленной цели при соединении одной из двух полостей насос-цилиндра с одной из двух, трех или четырех полостей цилиндра
стрелы в любом сочетании: поршневой полости насос-цилиндра с поршневой,.штоковой или дополнительной полостью цилиндра стрелы, и штоковой полости насос-цилиндра с теми же полостями цилиндра стрелы, причем, дополнительная полость также может быть поршневой или штоковой. .
Функции подъема-опускания стрелы при выполнении рабочих операций цикла погрузки и при корректировке траектории гребка совмещены в одном цилиндре, а введение распределителя в гидравлическую линию, соединяющую насос-цилиндр и цилиндр стрелы, упрощает регулировку траектории гребка. В результате упрощается конструкция рабочего органа и улучшается управление им по сравнению с прототипом, что обеспечивает получение экономического эффекта.
Формула изобретения 1. Рабочий орган погрузочной машины, включающий шарнирно соединеннее стрелу, рукоять, гребок с кронштейном, гидроцилиндры привода стрелы, рукояти и гребка, насос-цилиндр, соединяющий кронштейн гребка с рукоятью и. гидравлическую систему управления, отличающийся тем, что, с целью упрощения конструкции рабо10 8 4
1 /
чего органа, одна из полостей насос-цилиндра соединена с одной из полостей цилиндра стрелы посредством гидравлической линии.
2, Рабочий орган по п.1, о т л и ч а ю- щ и и с я тем, что, с целью упрощения управления им, гидравлическая линия, соединяющая насос-цилиндр и цилиндр стрелы, снабжена распределителем.
6 22
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган погрузочной машины | 1989 |
|
SU1666765A1 |
| Рабочий орган погрузочной машины | 1988 |
|
SU1640453A1 |
| Гребковая погрузочная машина | 1988 |
|
SU1583638A1 |
| Рабочий орган погрузочной машины | 1985 |
|
SU1314126A1 |
| Погрузочная машина | 1983 |
|
SU1155779A1 |
| Погрузочная машина | 1985 |
|
SU1308773A1 |
| Грузоподъемное устройство | 1985 |
|
SU1312060A2 |
| Грузоподъемное устройство | 1986 |
|
SU1439068A1 |
| Погрузочная машина | 1982 |
|
SU1067226A1 |
| Погрузочная машина | 1984 |
|
SU1155781A1 |
Использование: в горнодобывающей и строительной отраслях промышленности. Сущность изобретения: рабочий орган установлен на раме машины посредством шарнира и включает шарнирно соединенные стрелу, две рукояти, два гребка с кронштейнами, силовые цилиндры привода стрелы, рукоятей и гребков. Между кронштейном гребка и рукоятью установлен насос-цилиндр. Цилиндр стрелы может/быть выполнен с одним или с двумя поршнями, один из которых1 плавающий, помещенными в один корпус, и с двумя поршнями, каждый из которых помещен в изолированную часть общего корпуса. 1 з.п. ф-лы, 6 ил.
| Рабочий орган погрузочной машины | 1989 |
|
SU1666765A1 |
| Гребковая погрузочная машина | 1988 |
|
SU1583638A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
