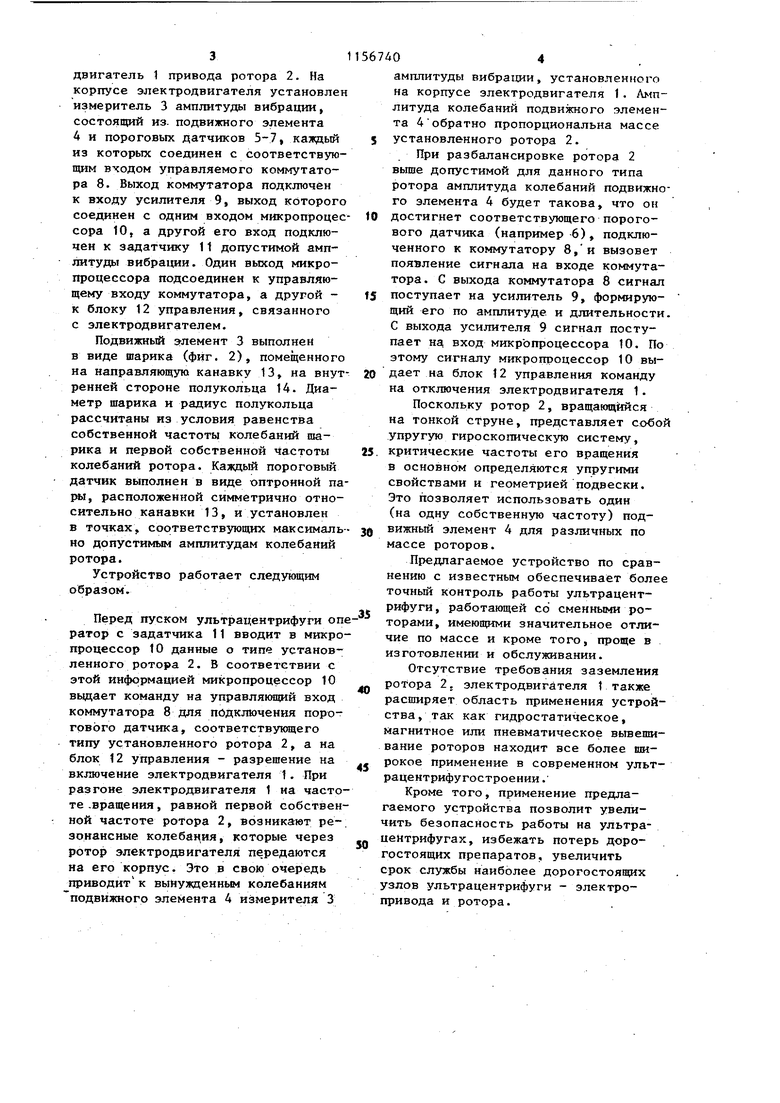
11 Изобретение относится к устройствам контроля работы ультрацентрифуг, в частности для обнаружения разбалансировки роторов, используемых в ультрацентрифугах при пров.едении научно-исследовательских работ в области медицины, биологии, химии, биофизике. Известно устройство контроля работы ультрацентрифуги, содержащее механическую систему измерения амплитуды вибрации ротора 03. Недостатками данного устройства являются сложность конструкции и не обходикость приведения его в рабочее положеи1Ге перед кажДьм пуском центрифуги. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство контроля работы ультрацентрифуги, сбдержащее измеритель амплитуды виб рации ротора, состоящий из подвижно го элемента и порогового датчика. и последовательно соединенные усшш тель, микропроцессор и блок управле ния электродвигателем привода ротора. При разбалансировке ротора подвижный элемент измерителя амплитуды имеющий электрический контакт с кор пусом электродвигателя, отклоняется от вертикального положения,- касаетс порогового датчика, вызывая появление сигнала на выходе усилителя. Этот сигнал поступает на микропроцессор, который выдает команду на блок управления на отключение элект родвигателя привода ротора 2. Известное устройство имеет ряд суще ста енньтх конструк1;ивных недостатко HaimtfHe в цепи управления защито от дисбаланса ротора двух механичес ких контактов (струна - кольцо, кол це - скользящий контакт), оба контакта при нормальной эксш1уата1Д1и в течение длительного времени находятся в нерабочем состоянии при постоянном воздействии масляного тумана, применяемого для смазки Подшипников, и подвержены влиянию эначительн 7го перепада температуры (-15° + 40с), не обеспечивается контроль работ способности устройства перед пуском ультрацентрифуги, пропадание напряжения в источнике питания ПРИВОДИТ к потере чувствительности устройства. Кроме того, устройство обеспечивает контроль только одного значения амплитуды вибрации, а сама конструкция не позволяет без его разборки изменять величину контролируемой амплитуды вибрации. Известное устройство не может быть использовано в ультрацентрифугах, эксплуатирующихся с тяжелыми и легкими роторами, так как максимально допустимое значение амплитуды колебаний тяжелого ротора отличается от соот-ветствуюЩего значения для легкого ротора. Необходимость иметь электрический контакт струны с корпусом электродвигателя не позволяет использовать устройство в ультрацентрифугах с электродвигателем, имеющим ротор на гидростатической подвеске, т.е. сужает область его применения. Целью изобретения является повышение точности контроля работы ультрацентрифуги. Поставленная цель достигается тем, что устройство для контроля работы ультрацентрифуги, содержащее измеритель амплитуды вибрации ротора, состоявши из подвижного элемента и порогового датчика, и последовательно соединенные усилитель, микропроцессор и блок управления электродвигателем привода ротора, оснащено управляемым коммутатором и задатчиком допустимой амплитуды вибрацииJ при этом измеритель амплитуды вибрации выполнен инерционным, установлен на электродвигателе и снабжен дополнительными пороговыми датчиками, каждый из которых отнесен от равновесного положения измерителя амплитуды на расстояние, соответствукяцее аксимально допустимой амплитуде вибрации ротора, причем пороговые датчики подключены к управляемому коммутатору, выход последнего связан с усилителем, а управляющий вход - с микропроцессором, к входу которого подключён задатчик допустимой амплитуды вибрации. На фиг. 1 приведена схема устройства для контроля работы ультрацентрифуги ; на фиг. 2 - конструктивный вариант измерителя амплитуды вибрации. Устройство для контроля работы ультрацентрифуги содержит электро3двигатель 1 привода ротора 2, FJa корпусе электродвигателя установлен измеритель 3 амплитуды вибрации, состоящий ИЗ- подвижного элемента 4 и пороговых датчиков 5-7, каждый из которых соединен с соответствующим входом управляемого коммутатора 8. Выход коммутатора подключен к входу усилителя 9, выход которого соединен с одним входом микропроцес сора 10, а другой его вход подключен к задатчику 11 допустимой амплитуды вибрации. Один выход микропроцессора подсоединен к управляющему входу коммутатора, а другой к блоку 12 управления, связанного с электродвигателем. Подвижный элемент 3 выполнен в виде шарика (фиг. 2), помещенного на направляющую канавку 13, на внут ренней стороне полукольца 14. Диаметр шарика и радиус полукольца рассчитаны из условия равенства собственной частоты колебаний шарика и первой собственной частоты колебаний ротора. Каждый пороговый датчик выполнен в виде оптронной па ры, расположенной симметрично относительно канавки 1 3 , и установлен в точках, соответствующих максималь но допустимым амплитудам колебаний ротора. Устройство работает следующим образом. Перед пуском ультрацентрифуги on ратор с задатчика 11 вводит в микро процессор 10 данные о типе установленного ротора 2. В соответствии с этой информацией микропроцессор 10 выдает команду на управляющий вход коммутатора 8 для подключения порогового датчика, соответствующего типу установленного ротора 2, а на блок 12 управления - разрешение на включение электродвигателя 1. При разгоне электродвигателя 1 на часто те .вращения, равной первой собствен ной частоте ротора 2, возникают резонансные колебан ия, которые через ротор электродвигателя передаются на его корпус. Это в свою очередь приводитк вынужденным колебаниям подвижного элемента 4 измерителя 3 04 амплитуды вибрахщи, установленного на корпусе электродвигателя 1 . Aj-mлитуда колебаний подвижного элемента 4обратно пропорциональна массе установленного ротора 2. При разбалансировке ротора 2 выше допустимой для данного типа ротора амплитуда колебаний подвижного элемента 4 будет такова, что он достигнет соответствующего порогового датчика (например 6), подключенного к коммутатору 8,и вызовет появление сигнала на входе коммутатора. С выхода коммутатора 8 сигнал поступает на усилитель 9, формирующий его по амплитуде и длительности. С выхода усилителя 9 сигнал поступает на вход микропроцессора 10. По этому сигналу микропроцессор 10 выдает на блок 12 управления команду на отключения электродвигателя 1. Поскольку ротор 2, вращающийся на тонкой струне, представляет собой упругую гироскопическую систему, критические частоты его вращения в основном определяются упругими свойствами и геометрией подвески. Это позволяет использовать один (на одну собственную частоту) подвижный элемент 4 для различных по массе роторов. Предлагаемое устройство по сравнению с известным обеспечивает более точный контроль работы ультрацентрифуги , работающей со сменными роторами, имеющ1п и значительное отличие по массе и кроме того, проще в изготовлении и обслуживании. Отсутствие требования заземления ротора 2, электродвигателя 1 также расширяет область применения устройства, так как гидростатическое, магнитное или пневматическое вывешивание роторов находит все более широкое применение в современном ультраЦентрифугостроении. Кроме того, применение предлагаемого устройства позволит увелиить безопасность работы на ультраентрифугах, избежать потерь дорогостоящих препаратов, увеличить рок службы наиболее дорогостоящих злов ультрацентрифуги - электроривода и ротора.
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ ДЕФЕКТОВ (ВОЗМУЩЕНИЙ) В ГАЗОВЫХ ЦЕНТРИФУГАХ ИЗОТОПНО-РАЗДЕЛИТЕЛЬНОГО КАСКАДА И СИСТЕМА ДИАГНОСТИКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236308C2 |
| Система программного управления инерционным вибропресс-молотом | 1986 |
|
SU1366271A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| Устройство для автоматического контроля процесса перемешивания бетонной смеси | 1991 |
|
SU1774920A3 |
| Автоматическое устройство управления бурового станка | 1980 |
|
SU909139A2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368857C1 |
| Адаптивная система программного управления инерционным вибропресс-молотом | 1989 |
|
SU1687351A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Электропривод переменного тока | 1988 |
|
SU1534737A1 |
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ УЛЬТРАЦЕНТРИФУГИ, содержащее измеритель амплитуды вибрации ротора, состоящий из подвижного элемента и порогового датчика, и последовательно соединенные усилитель, микропроцессор и блок управления электродвигателем привода ротора, отличающееся тем, что, с целью повьштения точности, оно оснащено управляемым коммутатором и задатчиком допустимой амплитуды вибрации, при этом измеритель амплитуды вибрации ротора вьтолнен инерционным, установлен на электродвигателе и снабжен дополнительными пороговьми датчиками, каждый из которых отнесен от равновесного положения измерителя .амплитуды на расстояние, соответствующее максимально допустимой амплитуде вибрации ротора, причем пороговые датчики подключены к управляемому коммутатору, выход последнего связан с усилителем, управляющий вход - с (Л микропроцессором, к входу которого подключен задатчик допустимой амплитуды вибрации. ел О) а 4:аь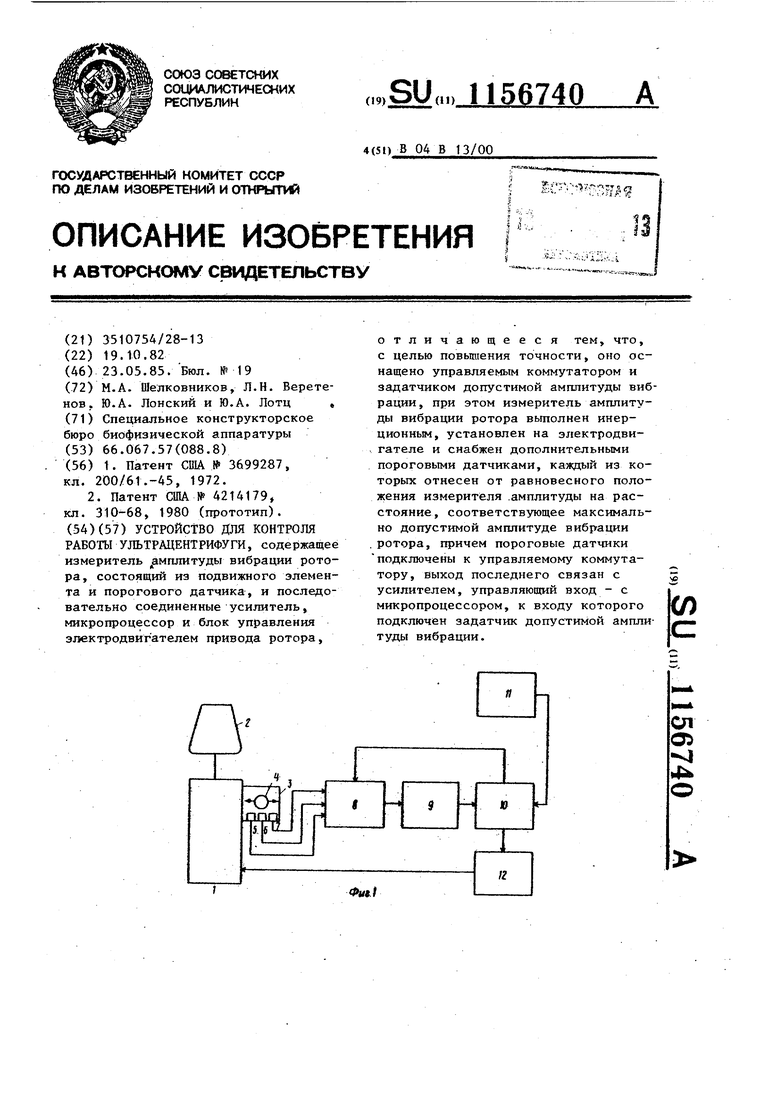
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3699287, кл | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4214179, кл | |||
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
