Изобретение относится к средствам для отвода грунта и может быть применено на земснарядах, занятых на углублении рек и каналов, а также в гидротехническом и гражданском строительстве.
Целью изобретения является повышение надежности в работе устройства, и сделать его пригодным для эксплуатации в производственных условиях при одновременном решении вопросов улучшения качества складирования грунта в стволе в соответствии с заранее заданной программой.
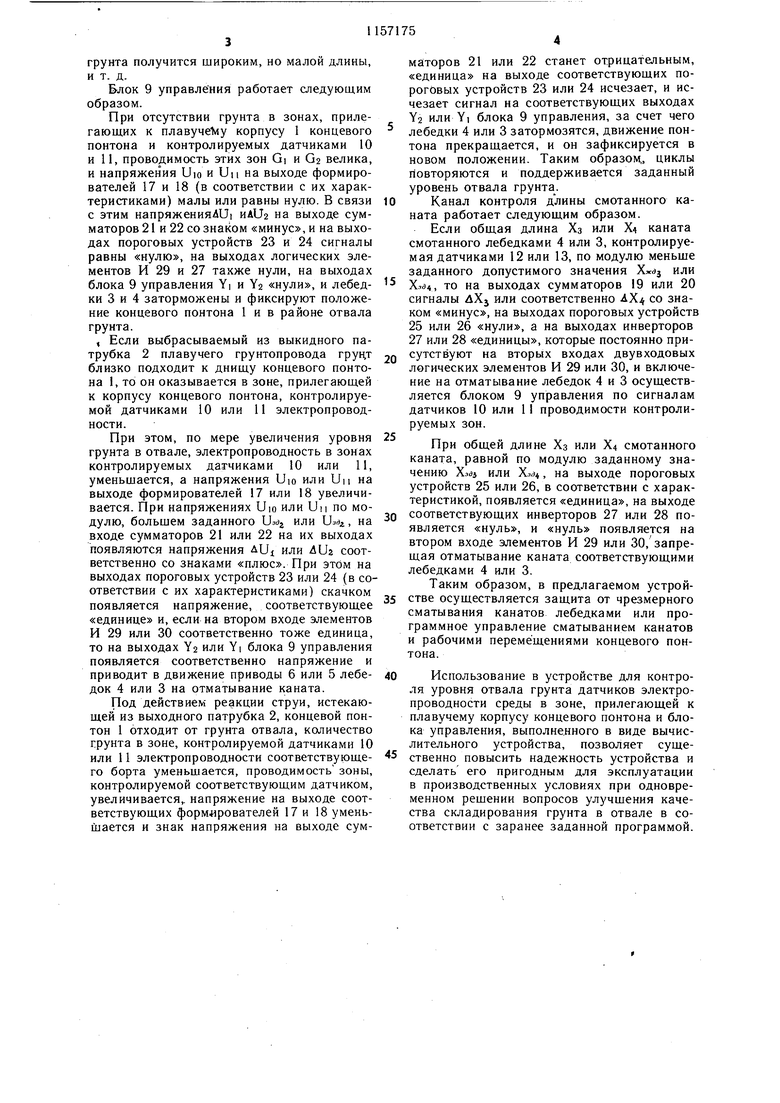
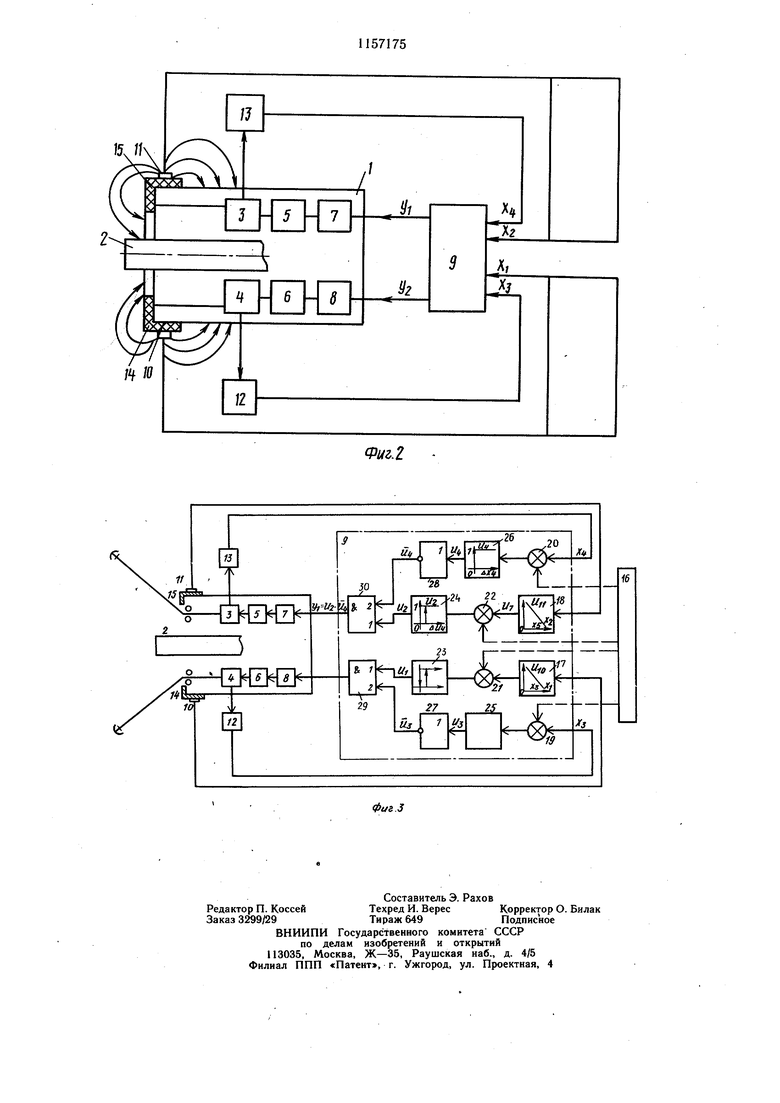
На фиг. 1 представлен концевой понтон и выкидной патрубок, общий вид; на фиг. 2 - функциональная схема устройства; на фиг. 3функциональная схема блока управления.
Устройство для автоматического управления перемещениями концевого понтона плавучего грунтопровода содержит корпус I концевого понтона, выкидной патрубок 2 плавучего пульпопровода, правую 3 и левую 4 лебедки рабочих перемещений понтона с приводами 5 и 6 соответственно и усилитапями 7 и 8 мощности, блок 9 управления, выполненный в виде вычислительного устройства, датчики 10 и 11 электропроводности среды в зонах, прилегающих соответственно к левому и правому бортам плавучего корпуса концевого понтона, датчики 12 и 13 количества троса на барабанах лебедок соответственно левого и правого борта, задатчик 16. Датчики 10 и 11 электропроводности среды в контролируемых зонах экранированы от части корпуса концевого понтона изоляционными экранами 14 и 15.
Датчики 10 и 11 электропроводности среды в зонах, прилегающих к левому и правому борту концевого понтона 1, совместно с датчиками 12 и 13 количества троса на барабанах лебедок 3 и 4 подключены ко входам блока 9 управления, к выходам которого подключены входы -усилителей 7 и 8 мощности приводов 5 и 6 лебедок 3 и 4.
Блок 9 включает следующие функциональные элементы: формирователи 17 и 18 сигналов датчиков 10 и 11 электропроводности среды в зонах, прилегающих соответственно к левому и правому бортам плавучего корпуса концевого понтона, сумматоры 19 и 20 (элементы сравнения) сигналов датчиков 12 и 13 количества троса, смотанного с барабанов лебедок соответственно левого и правого бортов, с заданием и Хза«, сумматоры 21 и 22 (элементы сравнения) сигналов формирователей 17 и 18 датчиков Юи 11 электропроводности с заданными Uadi И Uadj значениями проводимости (уровня отвала грунта) в контролируемых зонах, прилегающих соответртвенно к левому и правому борту концевого понтона 1, пороговые устройства 23, 25 и 24, 26 с сушественно нелинейными характеристиками релейного типа, инверторы 27 и 28, логические элементы 29 и 30, реализующие операцию логического умножения (И), и через посредство усилителей мощности 8 и 7 включающие приводы 6 и 5 лебедок 4 и 3 левого и правого борта на отматывание.
Значения Uadj-Uaej, , устанавливаются задатчиком 16.
Устройство работает следующим образом. При отсутствии грунта в зонах, прилегающих к плавучему корпусу 1 концевого понтона и контролируемых датчиками 10 и 11,
проводимость этих зон велика, а на выходах YI, Y2 блока 9 управления в этом случае «нули, и лебедки 3 и 4 заторможены и фиксируют положение концевого понтона 1 в районе отвала грунта.
Если выбрасываемый из выкидного патрубка 2 плавучего грунтопривода грунт близко подходит к днищу концевого понтона, то он оказывается в зоне, прилегающей к корпусу концевого понтона, контролируемой датчиками 10 и 11 электропроводности.
0 При этом по мере увеличения уровня грунта в отвале электропроводность среды в зонах, контролируемых датчиками 10 и 11, уменьшается, т. е. сопротивление растеканию тока в этих зонах увеличивается.
Если уровень проводимости, контролируемой датчиками. 10 и 11 зоны, снижается до заданного в блоке 9 управления, то на его соответствующем выходе, соответственно YI или 2, появляется сигнал. При этом усиленный усилителями 8 или 7 мощности, он приводит в действие приводы 6 или 5 соответствующей лебедки 4 или 3, которая начнет отматывать канат.
Под действием реакции струи, истекающей из выкидного патрубка 2, концевой понтон 1 отходит от грунта отвала, количество
5 грунта в зоне, контролируемой датчиками 10 или 11 электропроводности соответствующего борта, уменьщается. проводимость зоны, контролируемой соответствующим датчиком, увеличивается и оказывается выше заданной в блоке 9 управления. При этом сигнал на его
0 выходах YI или Y2 станет равным нулю, приводы 6 или 5 лебедок 4 или 3 остановятся и зафиксируют концевой понтон в новом положении. Таким образом, циклы повторяются и автоматически поддерживается заданный уровень отвала грунта. Исполнение блока 9 управления в виде вычислительного устройства и подключение на его вход датчиков 12 и 13, количество троса на барабанах позволяют реализовать различные алгоритмы и программы управления перемещениями
0 концевого понтона. Например, устройство при завале грунтом контролируемой зоны любого из датчиков проводимости может включать на отматывание сразу обе лебедки 3 и 4, при этом длина смотанного троса может быть заранее задана. Может быть
5 задана программа, при которой концевой понтон удерживается сначала на тросе одной лебедки, при этом отматывается трос другой лебедки, а потом наоборот, при этом отвал
грунта получится широким, но малой длины, и т. д.
Блок 9 управления работает следующим образом.
При отсутствии грунта в зонах, прилегающих к плавучеТиу корпусу 1 концевого понтона и контролируемых датчиками 10 и 11, проводимость этих зон GI и G2 велика, и напряжения Uio и Un на выходе формирователей 17 и 18 (в соответствии с их характеристиками) малы или равны нулю. В связи с этим напряженияДШ иАи2 на выходе сумматоров 21 и 22 со знаком «минус, и на выходах пороговых устройств 23 и 24 сигналы равны «нулю, на выходах логических элементов И 29 и 27 также нули, на выходах блока 9 управления Y: и 2 «нули, и лебедки 3 и 4 заторможены и фиксируют положение концевого понтона 1 и в районе отвала грунта.
, Если выбрасываемый из выкидного патрубка 2 плавучего грунтопровода грунт близко подходит к днищу концевого понтона 1, то он оказывается в зоне, прилегающей к корпусу концевого понтона, контролируемой датчиками 10 или 11 электропроводности.
При этом, по мере увеличения уровня грунта в отвале, электропроводность в зонах контролируемых датчиками 10 или 11, уменьщается, а напряжения Uio или Un на выходе формирователей 17 или 18 увеличивается. При напряжениях Uio или Un по модулю, больщем заданного или УЗЙД , на входе сумматоров 21 или 22 на их выходах появляются напряжения AUx или соответственно со знаками «плюс. При этом на выходах пороговых устройств 23 или 24 (в соответствии с их характеристиками) скачком появляется напряжение, соответствующее «единице и, если на втором входе элементов И 29 или 30 соответственно тоже единица, то на выходах Y2 или YI блока 9 управления появляется соответственно напряжение и приводит в движение приводы 6 или 5 лебедок 4 или 3 на отматывание каната.
Под действием реакции струи, истекающей из выходного патрубка 2, концевой понтон 1 отходит от грунта отвала, количество грунта в зоне, контролируемой датчиками 10 или 11 электропроводности соответствующего борта уменьщается, проводимость зоны, контролируемой соответствующим датчиком, увеличивается,, напряжение на выходе соответствующих формирователей 17 и 18 уменьшается и знак напряжения на выходе сумматоров 21 или 22 станет отрицательным, «единица на выходе соответствующих пороговых устройств 23 или 24 исчезает, и исчезает сигнал на соответствующих выходах Y2 или YI блока 9 управления, за счет чего
лебедки 4 или 3 затормозятся, движение понтона прекращается, и он зафиксируется в новом положении. Таким образом циклы повторяются и поддерживается заданный уровень отвала грунта.
Канал контроля длины смотанного каната работает следующим образом.
Если общая длина Хз или Х4 каната смотанного лебедками 4 или 3, контролируемая датчиками 12 или 13, по модулю меньще заданного допустимого значения или
5 X,d4, то на выходах сумматоров 19 или 20 сигналы AXj или соответственно АХ со знаком «минус, на выходах пороговых устройств 25 или 26 «нули, а на выходах инверторов 27 или 28 «единицы, которые постоянно приQ сутствуют на вторых входах двувходовых логических элементов И 29 или 30, и включение на отматывание лебедок 4 и 3 осуществляется блоком 9 управления по сигналам датчиков 10 или 1I проводимости контролируемых зон.
При общей длине Хз или Х4 смотанного каната, равной по модулю заданному значению Хзд) или X.,d4, на выходе пороговых устройств 25 или 26, в соответствии с характеристикой, появляется «единица, на выходе
0 соответствующих инверторов 27 или 28 появляется «нуль, и «нуль появляется на втором входе элементов И 29 или 30, запрещая отматывание каната соответствующими лебедками 4 или 3.
Таким образом, в предлагаемом устройстве осуществляется защита от чрезмерного сматывания канатов лебедками или программное управление сматыванием канатов и рабочими перемещениями концевого понтона.
0 Использование в устройстве для контроля уровня отвала грунта датчиков электропроводности среды в зоне, прилегающей к плавучему корпусу концевого понтона и блока управления, выполненного в виде вычислительного устройства, позволяет существенно повысить надежность устройства и сделать его пригодным для эксплуатации в производственных условиях при одновременном рещении вопросов улучщения качества складирования грунта в отвале в соответствии с заранее заданной программой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ, ОБОРУДОВАННЫМ МЕХАНИЧЕСКИМ РАЗРЫХЛИТЕЛЕМ | 1973 |
|
SU383808A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| СПОСОБ ПОДЪЁМА ПОДВОДНЫХ ЛОДОК | 2001 |
|
RU2228281C2 |
| Кабелепрокладочный комплекс | 1990 |
|
SU1794791A1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2003 |
|
RU2269448C2 |
| Устройство для управления гидромеханизированным добывающим комплексом | 1977 |
|
SU670693A1 |
| Безъякорный землесосный снаряд | 1989 |
|
SU1735504A1 |
| МЕХАНИЧЕСКИЙ ПОДВОДНЫЙ ПЛАНИРОВЩИК | 2006 |
|
RU2334046C2 |
| СПОСОБ СООРУЖЕНИЯ ПРОЛЕТНОГО СТРОЕНИЯ ВАНТОВОГО МОСТОВОГО ПЕРЕХОДА ЧЕРЕЗ МОРСКОЙ СУДОХОДНЫЙ ПРОЛИВ | 2015 |
|
RU2612050C1 |
| Способ ликвидации открытых фонтанов на морских скважинах при подводном расположении их устья | 2019 |
|
RU2726742C1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯМИ КОНЦЕВОГО ПОНТОНА ПЛАВУЧЕГО ГРУНТОПРОВОДА, содержащее соединенные с усилителями мощности приводы лебедок и блок управления, отличающееся тем, что, с целью повышения надежности в работе устройства, оно снабжено датчиками количества троса на барабанах лебедки и датчиками электропроводности среды в зоне концевого понтона, выходы которых подключены к входам блока управления, соединенного с входами усилителей мощности. i сд ел
| 0 |
|
SU182067A1 | |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
