1
Известны устройства для управления землесосными снарядами с механическими разрыхлителями, содержащие датчики момента и скорости приводов ведущей и ведомой лебедок и разрыхлителя, усилители мощности и сумматоры ведущей и ведомой лебедок.
В известном устройстве токовая нагрузка разрыхлителя, которую должно поддерживать устройство, задается оператором Hia основании опыта.
Это особенно сказывается на работе устройств с регулируемым числом оборотов.
Цель изобретения - получение максимальной производительности землесосного снаряда по грунту.
Достигается это тем, что к датчикам скорости и момента разрыхлителя подключен блок определения максимума мощности, выход которого соединен с усилителем мощности ведущей лебедки, к другому выходу которого подключен датчик скорости привода разрыхлителя. Выход усилителя мощности ведущей лебедки связав с приводом ее, датчики скорости и момента которого через сумматор ведущей лебедки соединены с усилителем мощности ведомой лебедки.
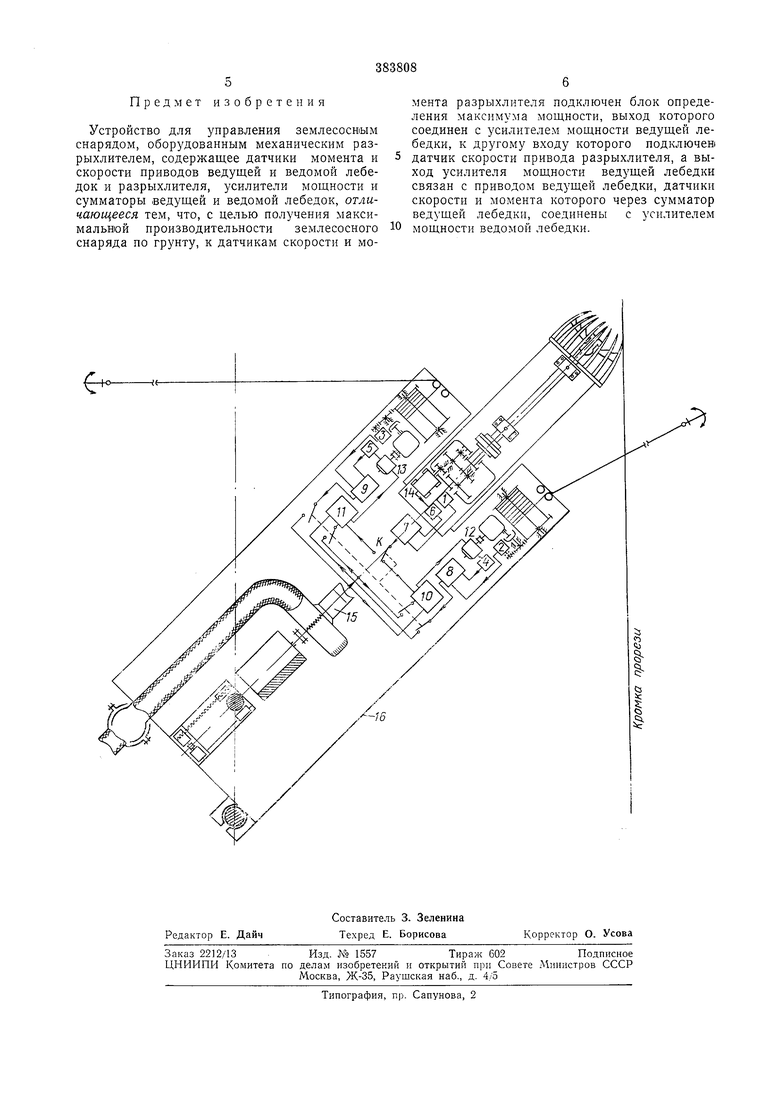
На чертеже изображена схема предлагаемого устройства.
Устройство для управления землесосным снарядом, оборудованным механическим разрыхлителем, включает датчики скорости /-5, соответственно разрыхлителя, ведущей лебедки и ведомой лебедки, датчики 4-6 моментов приводов ведущей и ведомой лебедок и разрыхлителя, блок 7 определения максимума мощности разрыхлителя, сумматора S и 9 однородных величин, пропорциональных скорости и моментам приводов ведущей и ведомой лебедок, усилители /f и // мощности с возмол ностью суммирования сигналов на входе, исполнительные устройства ведущей /2 и ведомой /L лебедок, разрыхлитель 14, корректор /5 режима по условиям использования гидротранспорта. Оборудование смонтировано на общем плавучем корпусе землесосного снаряда 16.
Электрический сигнал, пропорцион1альный скорости вращения разрыхлителя, в качестве задающего сигнала подают на вход усилителя
10 мощности лебедки, работающей в режиме наматывания. На вход этого же усилителя подают сигн1ал блока 7 максимума мощности и корректора /5, где они суммируются и вычитаются из сигнала датчика / скорости. На
вход усилителя // мощности лебедки, работающей в режиме отматывания, подают только сигнал с сумматора 8 электрических величин, пропорциональных скорости и моменту привода ведущей лебедки 12, по которому
определяют скорость отматывания кавата лебедкой 13. При папильонировании замснаряда в противоположную сторону соответствующие сигналы подают на вход усилителя противоположной лебедки. Переключен1ие сигналов осуществляют коммутатором К..
Устройство работает следующим образом.
При положении коммутатора /(, покзанном на чертеже, правая ведущая лебедка 12 включена в режим наматывания каната, а левая 13 - в режим отматывания. Если механический разрыхлитель 14 вращается, то надряжение, снимаемое с датчика 1 скорости и подаваемое на вход усилителя 10, усиливается по мощности и приводит в движение исполнительное устройство ведущей лебедки 12. При этом, если, загрузка привода разрыхлителя меньще максимально возможной, а момент на валу привода лебедки Г2 меньще заданного максимального значения, то привод лебедки развивает максимальную скорость.
Земснаряд начинает папильонировать, а механический разрыхлитель перемещаться в грунте, со скоростью папильонирования земснаряда.
Поскольку сила резания, развиваемая приводом механического разрыхлителя пропорциональна скорости перемещения фреза в грунте Ип и толщине снимаемого слоя, момент на валу привода разрыхлителя, фиксируемый датчиком Ь, возрастает:
. -л:. 1/ . Л -1 -
AT д-Аср .
А
где Кт - безразмерный коэффициент толщины, Vn - скорость перемещения фрезы в
грунте, - средний диаметр фрезы,
i - длива ножа фрезы, - сила резания, - окружная скорость ножа фрезы, X - удельное сопротивление грунта резанию, кг1м-.
В тот период, когда момент сопротивления на валу привода разрыхлителя продолжает расти, а мощность, развиваемая приводом разрыхлителя, уменьщается, блок 7 максимума мощности подает на вход усилителя 10 сигнал на уменьщение скорости ведущей лебедки 12. При этом скорость папильонирования уменьшается, момент сопротивления на валу привода разрыхлителя, фиксируемый датчиком 6, уменьщается, обороты привода разрыхлителя возрастают, за счет чего и возрастает мощность на валу разрыхлителя, сигнал с блока максимума мощности уменьщается и скорость папильонирования снова увеличивается. Таким образом устройство автоматически поддерживает скорость папильонир01вания такой, чтобы загрузка привода разрыхлителя была близка к экстремальной точке характеристики мощности.
Скорость ведущей лебедки 12 уменьщается и в случае, если момент на валу ее привода оказывается выше -максимального заданного значения. Уменьщение скорости осуществляется за счет действия, например, отрицательной обратной связи по току электропривода лебедки. Когда лебедка J2 не работает, сигналы датчиков 2 н 4 скорости и момента привода, результирующий сигнал с сумматора и скорость отмывания троса лебедки 13 равны нулю.
При работе лебедки 12 без тягового усилия в тросе скорость отматывания лебедки 13 выбирается пропорционально скорости наматывания лебедки 12, согласно напряжения датчика 2, однако величина ее составляет во всем диапазоне скоростей примерно 50% скорости выбирающей лебедки. За счет разницы скоростей лебедок в канате лебедки 13 возникает
тормозящая тяга, передающаяся на канат лебедки 12. При этом возрастает момент на валу привода лебедки 12, увеличивается сигнал датчика 4 и суммарный сигнал с сумматора 8. Скорость лебедки 13 возрастает, за счет
чего уменьшается тормозящее усилие и тяга в канате лебедки 12. В конечном итоге скорости лебедок стабилизируются на определенном уровне. В случае, если Hia земснаряд действует
свальное течение с левого борта, канал левой лебедки воспринимает усилие гидродинамического давления потока и препятствует неуправляемому движению земснаряда под действием потока. Скорость папильонирования
земснаряда в этом случае будет определяться скоростью отматывания каната лебедкой 13, пропорциональной скорости лебедки 1, задаваемой соответствующими датчиками, характеризующими использование возможностей
земснаряда по производительности. За счет этого повышается устойчивость технологического режима к действию внешних возмущений.
Корректировка скорости папильонирования
по условиям всасывания материала и по условиям использования гидротранспортирующей способности земснаряда осуществляется датчиком 15, в качестве которого в принципе может быть использован любой из известных
датчиков. В случае полного использования гидротранспортирующей способности насосной установки сигвал с датчика 15 подается на вход усилителя 10 мощности и вычитается из сигнала датчика / скорости папильонирования, за счет чего скорость папильонирования уменьщается и уменьщается количество материала, подаваемого во всасывающую часть гидротранспортной насосной установки. При уменьшении загрузки гидротранспорта
сигнал корректора 15 уменьшается и скорость папильонирования возрастает, что приводит к увеличению загрузки гидротранспорта. При папильонировании в противоположную сторону коммутатор К переключается в
другое и положение роли лебедок меняется.
Предмет изобретения
Устройство для управления землесосным снарядом, оборудованным механическим разрыхлителем, содержащее датчики момента и скорости приводов ведущей и ведомой лебедок и разрыхлителя, усилители мощности и сумматоры ведущей и ведомой лебедок, отличающееся тем, что, с целью получения максимальной производительности землесосного снаряда по грунту, к датчикам скорости и момента разрыхлителя подключен блок определения максимума мощности, выход которого соединен с усилителем мощности ведущей лебедки, к другому входу которого подключен
датчик скорости привода разрыхлителя, а выход усилителя мощности ведущей лебедки связан с приводом ведущей лебедки, датчики скорости и момента которого через сумматор ведущей лебедки, соединены с усилителем
мощности ведомой лебедки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления земснарядом | 1977 |
|
SU708020A1 |
| РЕГУЛЯТОР УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗЕМЛЕСОСНОГО СНАРЯДА | 1991 |
|
RU2011756C1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗЕМЛЕСОСНЫМ СНАРЯДОМ | 1967 |
|
SU199007A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Устройство для автоматического управления перемещениями концевого понтона плавучего грунтопровода | 1982 |
|
SU1157175A1 |
| Устройство для автоматического регулирования добычного комплекса драги | 1980 |
|
SU1076538A1 |
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |