Известные датчики для измерения плотности жидких сред с пьезометрическими трубками для подвода сжатого воздуха обладают недостатками, заключающимися в контакте воздуха с измеряемой средой, недостаточной точностью измерения и ненадежностью в работе, а также п их больших габаритах, что ограничивает, а в отдельных случаях исключает промышленное применение.
Описываемый датчик для измерения плотности жидких сред не имеет указанных недостатков и позволяет повысить точность измеренияДатчик выполнен в виде блока мембранных камер, расположенных на различной высоте в измеряемой среде. В мембранные камеры встроены сопла.
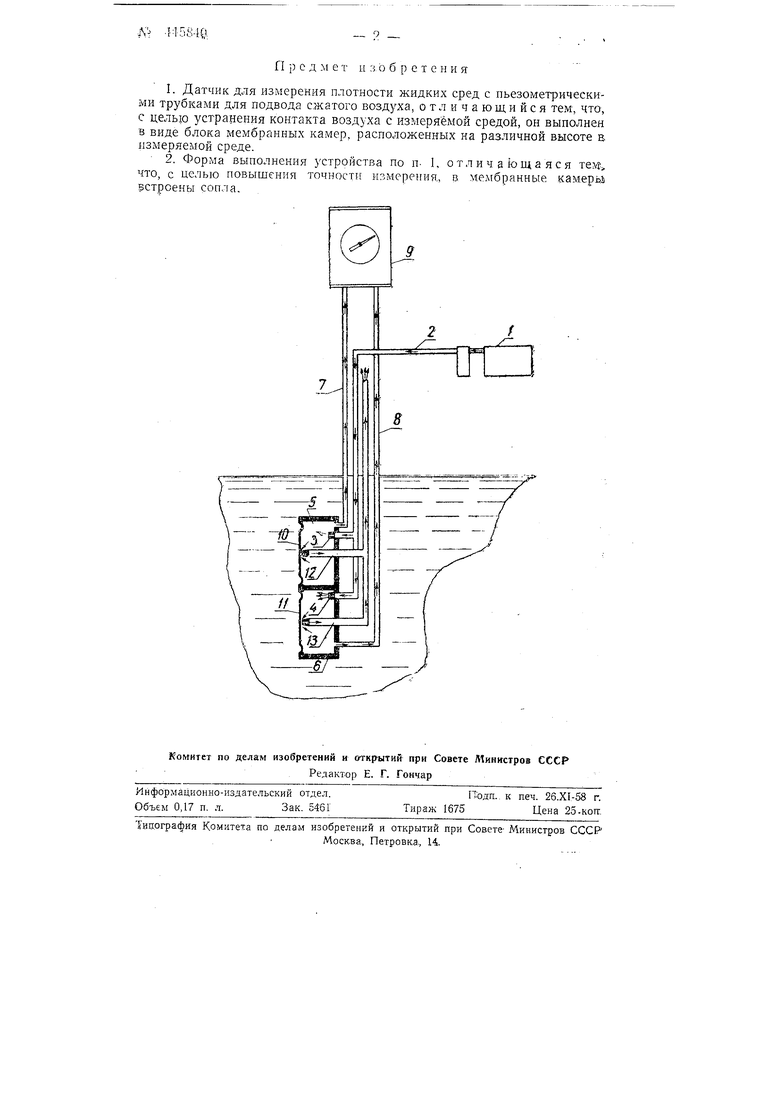
На чертеже изображена схема датчика.
Датчик питается от источника 1 сжатого воздуха по трубке 2, имеющей отводы 5 и 4 с калиброванными отверстиями- Концы отводов 3 и 4 расположены внутри мембранных камер 5 и 6, сообщаюш,ихся через трубопроводы 7 и 5 с манометром 9 и расположенных на различной высоте в измеряемой среде.
Две эластичные мембраны /6 и 11, воспринимающие гидростатические давления жидкости, прикрывая встроенные в камере сопла 12 и 13, уменьшают количество воздуха, сбрасываемого в атмосферу.
Так как в камеры 5 и (5 воздух поступает непрерывно через калиброванные отверстия отводов 3 vi 4, уменьшение сброса воздуха в атмосферу через сопла 12 и 13 приводит к повышению давлений воздуха в камерах до тех пор, пока эти давления не уравновесят гидростатические давления жидкости с наружной стороны мембран 10 и 11. Таким образом, давления воздуха внутри камер равны гидростатическим давлениям измеряемой жидкости с наружной стороны мембран. Так как мембраны расположены на различной высоте в измеряемой жидкостной среде, то разность давлений в мембранных камерах 5 6 зависит только от плотности жидкости.