Изобретение относится к электротехнике и может быть использовано, например, в сиспемах регулирования скорости электроприводов непрерывны прокатных станов, линий для производства полимерных пленок, а Также в бумагоделательных машинах. По основному авт. св. № 1104632 известен многодвигательный электропривод, содержащий электродвигатели постоянного тока с регуляторами скорости, подключенными к блоку задания скоростей многодвигательного электропривода, датчики тока якоря двигателей, блоки сравнения с минимально дoпycти « м током якоря двигателя и блокн сравнения с максимал но дoпycти я lм током якоря двигателя с нуль-органоми по числу двигателей два логических элемента ИЛИ, блок коммутации и фильТр, причем каждый датчик тока Якоря двигателя подключен к соответствующим блоку сравнения с минимально дoпycти « lм током якоря двигателя и блoky сравнения с максимально допустиьв51м током якоря двигателя, выходы блоков сравнения с минимально допустимым током якоря двигателя через нуль-органы соедине ны с вxoдa вi первого логического элемента ИЛИ, выходы блоков сравнения с максимально допустимым током якоря двигателя через нуль-органы соединены с входами второго логичес кого элемента WB1, выходы первого и второго логических элементов ИЛИ подключены к управляющим входам блока коммутации, входы задания которого подключены соответственно к шинам задания, максимального задани и №«-нимального задания, а выход - к входу фильтра, выход которого соединен с входом блока задания скорос тей многодвигательного электропривода. I Устройство обеспечивает подде;ржа ние максимально допустимого темпа изменения скорости многодвигательного электропривода за счет автома;тической настройки темпа изменения сигнала на входе эталонного задания скоростей многодвигательного электр привода на максимально возможный при поддержании заданных соотношений двигателей 1 . В случае, если технологическая жнмя заг1ружена не полностью, напри мер, при непрерывной прокатке, расА2кат покидает группу клетей, приводимую многодвигательным приводомчасть двигателей работает в режиме холостого хода с минимальной нагрузкой, В известном устройстве именно такие двигатели определяют темп снижения скорости многодвигательного электропривода,а поскольку для обеспечения технологического процесса не требуется поддержания соотношения скоростей незагруженных двигателей многодвигательного электропривода, это снижает быстродействие электропривода. Цель изобретения - повышение быстродействия многодвигательного электропривода. Поставленная цель достигается тем, что в многодвигательный электропривод дополнительно введены датчики статической нагрузки и управляемые ключи по числу двигателей, причем выход датчика статической нагрузки каждого из двигателей подключен к управляющему входу одного из управляемьк ключей, коммутируемый вход последнего соединен с нуль-органом, которьй подключен к блоку сравнения с минимально допустимь1м током якоря соответствующего двигателя, а выходы управляемых ключей - к входам первого элемента ИЛИ. На чертеже представлена блок-схема многодвиг-ательного электропривода. . Многодвигательный электропривод содержит электродвигатели t, 2 и 3 постоянного тока, приводящие во вращение валки 4, 5, 6 и подключенные к регуляторам 7 скорости, которые соединены с блоком 8 задания скоростей многодвигательного электропривода. Выходы каждого из датчиков 9 тока якоря двигателей 1,2 и 3 подключе нЬ1 к входам блоков 10 сравнения с минимально допустимым током якоря двигателя и блоков 11 сравнения с максимально допустимым током якоря двигателя, а выходы каждого из блоков 10 и 11 сравнения соединены с вькодами соЬтветствуквЦих нуль-органов 12, представляющих собой компарато.ры« Выхода нуль-органов 12, которые входами подключены к блокам 10 сравнения с шнимaльнo допустимым током двигателя, соед инены с входами первого логического элемента
ИЛИ 13 через управляемые ключи 14, гуправлякщие входы которых соединены с выходами датчиков 15 статической нагрузки, выполненньк, например, в виде последовательно соединенных датчика статического тока и компаратора cootBeTCTByraiyJX двигателей, а выходы нуль-органов 12, входами подключенные к выходам блоков И сравнения, непосредственно соединены с входами второго элемента ИЛИ 16.
Выходы логических элементов ИЛИ 13 и 16 подключены к управляющим входам блока 17 коммутации, входы задания которого подключены соответственно к шинам заданий, максимального задания и минимального задания. Выход блока 17 коммутации Через фильтр 18 подключен к входу эталонного задания блока 8 задания скоростей многодвигательного электропривода.
Электропривод работает следующим образом.
В исходном состоянии, когда во всех валкахА, 5 и 6 находится обрабатываеьый материал, на: вьаодах датчиков 15 статической нагрузки присутствует сигнал, который поступает на управляккцие в1ХодЫ управляемых ключей 14 и подключает выходы нуль-органов 12, соединенных входами с блоками Ю. сравнения с в нийaльнo доцустиьадм током якоря, к йходам первого элемента ИЛИ 13,
В случае, если один из двигателей не загружен, например двигатель 1, вследствие отсутствия обрабатываемого материала в валках 4, сигнал на соответствуницей датчике 15 статической нагрузки отсутствует и ключ 14 отключает выход нуль-органа 12, соединенного с датчиком 9 тока якоря двигателя 1 через блок 10 сравнения, от входа первого элемента ИЛИ 13. При этом случае разгона многодвигательного электропривода максимальный темп определяется токами в двигателях 2 и 3, так как незагруженый двигатель 1 имеет максимальный запас по увеличению тока. В случае снижения скорости на многодвигательном электроприводе и незагруженном двигателе 1, последний начинает сразу работать на выбеге, ток якоря падает до нуЯя и на выходе блока 10 сравнения и нуль-органа 12 появ ляется сигнал о максимально допустимом темпе снижения скорости, однако так как статическая нагрузка отсутствует, ключ 14 отключает выход нуль-органа 12 от входа первого элемента ИЛИ 13 и исключает перевод многодвигательного электропривода в режим автоматического огранчения темпа снижения скорости. Режим автоматического ограничения темпа снижения скорости имеет место только в том случае, когда ток якоря одного из загруженных двигателей 2 или 3 достигает своих максимально допустимых значений.
В случае снятия статической нагрузки с двигателя сигнал с датчика статической загрузки и управляюцего входа соответствующего управляемого ключа снимается и отключает канал формирования сигнала на уменьшение темпа снижения скорости данного двигателя от cxetta управления скоростью многодвигательного электропривода.
Таким образом, благодаря тому, что максимально допусткмый темп стжения скорости многодвжсательного электропривода определяется по ружейным, непосредственно обеспечивающим технологический процесс, двигателям, обеспечивается повышение бьк:тродействия всего многодвигательного электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1983 |
|
SU1104632A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для управления электродвигателем постоянного тока | 1977 |
|
SU928579A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Способ астатического регулирования скорости двигателя постоянного тока | 1982 |
|
SU1067581A1 |
ННОГОЙВИГАТЕЛЫйЙ ЭЛБКТРО-V ПРИВОД по авт. св. 1104632, от л и ч а ю щ и и с я тем, что, с целью повьгаения быстродействия, в него дополнительно введены датчики статической нагрузки н управляемые ключи по числу двигателей, причем выход датчика, статической нагрузки каждого из двигателей подключен к управляющему входу одного из управля ключей, коммутируемый вход последнего соединен с нуль-орГаном, который.подключен к блоку сравнения с минимально допустимым током якоря соответствуннцего двигателя, а выходы управляемых ключей - к входам первого элемента ИЛИ. 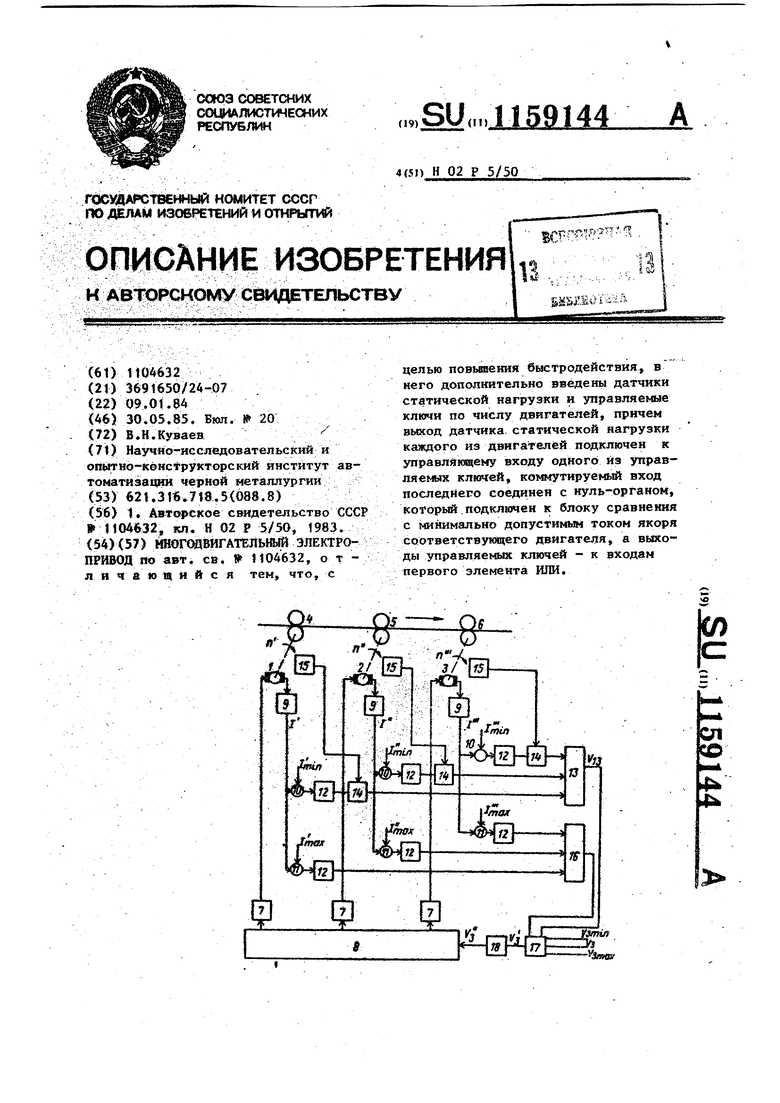
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
