Изобретение относится к средствам автоматиэация трубогибочного обору- дования и может найти широкое применение в различных отраслях машиностроения, в частности в энергомашиностроении при изготовлении гнутых трубиых элементов, используемых в конструкциях энергетических установок.
Цель изобретения - расширение технологических возможностей за счет манипулирования длинномерными заготовками.
Поставленная цель достигается тем что в автооператоре, преимущественно для длинномерных изделий содержащем колонну, закрепленную йа основании, штангу, установленную на конце колонны при помощи вала с воз; можностью поворота от привода, захватный орган с зажимньтми губками, размещенный на валу на конце штанги с возможностью поворота, и механизм синхронного поворота штанги и захватного органа, последний выполнен в виде связанных между собой цепной и зубчатой планетарной передачи, при зтом солнечная шестерня последней свободно установлена на валу штанги, зафиксирована отпрворота относительно колонны и связана с сателлитом, размещенным с возможностью вращения на оси, закрепленной в штанге параллельно валу, на сателлите и валу захватного органа закреплены звездоч ки цепной передачи.
На фиг. 1 - изображен технологический комплекс автооператор - трубогибочная машина, общий вид; на фиг.
; на фиг. 3 - разрез А-А
70 Ж6. иЛЗ-П Г1СЛ i-j /riix угл- у jn. fi, ; на фиг. 4 - разрез Б-Б
на фиг. 1 на фиг. 1.
Автооператор устанавливают непосредственно утрубогибочных машины, и 5 содержит он основание 1, с укрепленной на нем колонной 2, в верхней части которой на валу 3 смонтирована консольно штанга 4 с захватным органом 5 трубных заготовок..Штанга ус- 50 тановлена с возможностью поворота совместно с валом 3 и имеет для этого привод, вьшолненный в виде параллельно закрепленных на колонне 2 силовых цилиндров 6 и 7, штоки 8 и 9,55 которых жестко связаны с тяговой цепью to, охватывающей жестко сидящую на валу 3 звездочку 11.
Механизм синхронного поворота штанги и захватного органа представляет собой цепную передачу 12, с двумя параллельными валами 13 и 14, Вал 14 жестко связан .с корпусом захватного органа, .а вал 13 посредством зубчатой планетарной передачи связан с валом 3 штанги. При зтом солнечная шестерня 15, передачи свободно смонтирована на валу штанги, а сопряженный с ней сателлит 16 на валу 13. На сателлите 16 жестко закреплена звездочка 17, которая посредством цепи 18 связана со звездочкой 19, жестко закрепленной на валу 14, уСтановленом на подшипниках 20 в штанге 4. Солнечная шестерня 15 находитс в зацеплении с рейкой 21, жестко закрепленной на кронштейне 22 колонны 2
Автооператор у трубогибочной машины работает с тедующим образом.
Автооператор после, загрузки трубы в трубогибочную машину находится в исходном положении (фиг.1).
Включением силового цилиндра 6 . шток 8 перемещается вниз (на втягивание, при зтом шток 9 вьдвигается синхронно из цилиндра 7) и посредство I иепи 10 поворачивает звездочку 11, а следовательно и вал 3.
Совместно со штангой 4 относительно колонны 2 в процессе поворота: штанги (полный угол поворота в позицию захвата трубы - 180 ) ось 13 поворачивается вокруг оси вала 3 и обкатывает сателлит 16 вокруг неподвижной солнечнойшестерни 15, заставляя звездочку 17 вращаться вокруг оси 13 и через цепь 18 передавать вращение звездочке 19, валу 14 и жестко связанному с ним захватному органу 5, при зтом захватный орган поворачивается относительно штанги 4 на 180 , а относительно колонны (совместно со штангой) на 360 ° и устанавливается в
позицию захвата трубы из накопителя. I .
Включением цилиндра 7 ( на втягивание штока 9) штанга 4 поворачивается в противоположную сторону на 180 и выводит захватный орган 5 с трубой в позицию загрузки трубы в трубогибочную машину. При установке второго автооператора с другой стороны трубогибочной машины возможно осуществлять съем гнутых труб из трубогибочной машины и укладку их в стеллаж-контейнер. При зтом работа второго автооператора осуществляется в последовательности, аналогичной описанной. Таким образом, автооператор позволяет автоматизировать процессы 1159 7574 загрузки заготовки в трубогибочную машину и съема изогнутой детали и расширяет технологические возможности комплекса за счет манипулирования длинномерными заготовками.
15
ui,3 . л. i r ч s 20 г ттУтТЗд 1 г 1 л л аг t9 1 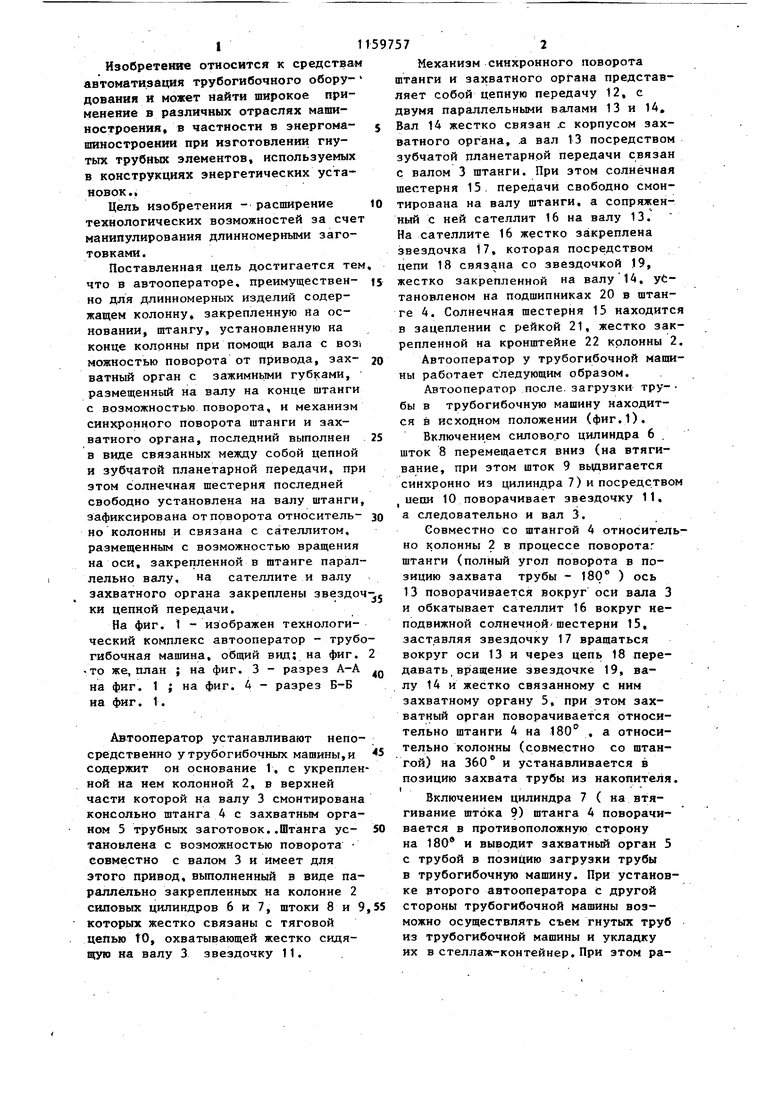

| название | год | авторы | номер документа |
|---|---|---|---|
| МОСТОВОЙ КРАН | 1969 |
|
SU247482A1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| Устройство для вибровращательного бурения | 1982 |
|
SU1078018A1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1968 |
|
SU213543A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2156713C1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Привод устройства для подачи штучных заготовок | 1974 |
|
SU560680A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |

АВТООПЕРАТОР, преимущественно для длинномерных изделий, содержащий колонну, закрепленную на основании, штангу, установленную на конце колонны при помощи вала с возможностью поворота от привода, захватный орган с зажимными губками. раэмещенньй на валу на конце штанги с возможностью поворота, и механизм синхронного поворота штанги и захватного органа, отличают .и йс я тем, что, с целью расширения технологических возможностей за счёт манипулирования длинномерньо4И заготовками, механизм синхронного поворота штанги и захватного органа выполнен в виде связанных между собой цепной и зубчатой планетарной , передач, при этом солнечная шестерня последней свободно установлена на валу штанги, зафиксирована от поворота относительно колонны и связана с сателлитом, размещенным с возможностью вращения на оси, закрепленной в штанге параллельно валу, a на сателлите и вАпу захватного органа закреплены звездочки цепной передачи. О1 со ч| СП Фиг. i
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Заявка ФРГ № 2927753, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
