оо
00
X
Изобретение относится к машиностроению, в частности к системам автоматического управления судов, и может быть использовано для регулирова- кия передачи двигатель-винт судна.
Целью изобретения является повьше- ние надежности работы системы.
На чертеже приведена схема системы.
Устройство содержит первый 1, второй третий 3 задатчики режимов работы, вьтолненные в виде формирователей уставки момента на валу двигателя, датчик А момента на валу двигателя, компаратор 5, одновибратор 6, коммутатор 7 с двумя сигнальными и уп paвляющи г входами, интегратор 8, сумматор 9 с тремя входами, усилитель 10 с выходом для подключения к исполнительному механизму 11 изменения шага винта. Уставка первого за- датчика 1 выбрана равной предельно допустимому значению момента на валу двигателя, уставка второго задат- чика 2 соответствует величине момента на 15-25% меньше предельно допустимого, а уставк третьего задатчика 3 превышает уставку второго задатчика 2 на 10-20%. Датчик 4 момента подключен к первому входу сумматора 9 и к первому входу компаратора 5, второй вход которого связан с выходом третьего задатчика 3. Выход компаратора 5 связан через одновибратор 6 с управляющим входом коммутатора 7, а через интегратор 8 - с вторым входом сумматора 9. Первый сигнальный вход коммутатора 7 подключен к выходу первого задатчика 1, второй его сигнальный вход подключен к выходу второго задатчика 2, а выход коммутатора 7 связан с третьим входом сумматора 9. Выход сумматора 9 через усилитель 10 связан с исполнительным механизмом 11 изменения шага винта.
Устройство работает следующим образом.
В случае, когда сигнал от датчика 4 момента на валу двигателя не превышает величину уставки от задатчика 3 на выходе компаратора 5, одновибра- тора 6 и интегратора 8, сформирован нулевой сигнал. При этом через коммутатор 7 к третьему входу сумматора 9 подключен задатчик 2 и на исполнительный механизм 11 через усилитель 10 подается сигнал рассогласования
0
5 0 5 о д j
5
0
5
между уставкой задатчика 2 и датчика 4, обеспечивающий пропордиональное регулирование шага винта.
При превышении сигнала от датчика 4 уставки задатчика 3 на выходе компаратора 5 и одновибратора 6 формируется единичный сигнал, коммутатор 7 подключает к третьеьгу входу сумматора 9 выход задатчика 1, сигнал на выходе сумматора 9 в этом случае определяется разностью сигналов от задатчика 1 и датчика 4, что позволяет в указанном режиме обеспечить мощность силовой установки близкой к номинальной. Одновременно с этим по сигналу с выхода компаратора 5 включается интегратор 8, сигнал от которого поступает на второй вход сумматора 9, что обеспечивает изменение шага винта и снижение нагрузки на двигатель.
Через время сГ, определяемое характеристиками одновибратора 6, к к третьему входу сумматора 9 вновь подключается уставка от задатчика 2, что обеспечивает запас мощности для защиты судовой установки при последующем ударе.
Таким образом, устройство управления судовой установкой обеспечивает полное использование мощности двигателя при воздействии ударных нагрузок, что увеличивает эффективность прохождения судна через лед и в то же время обеспечивает надежную защиту двигателя от перегрузок.
Формула изобретения
Устройство управления судовой силовой установкой, содержащее усилитель с выходом для подключения к исполнительному механизму изменения шага винта, датчик нагрузки двигателя, первый, второй и третий задатчики режимов работы и коммутатор, отличающееся тем, что, с целью повьшения Надежности, оно дополнительно содержит компаратор, одно- вибратор, интегратор и сумматор с тремя входами, причем задатчики режимов работы выполнены в виде формирователей уставки момента на валу двигателя , уставка первого задатчика вьшолнена равной предельно допусти- . мому значению момента на валу двигателя, а уставки второго и третьего
3J3904084
задатчиков соответствуют частичнымновибратор с управляющим входом ком- значениям этого момента, коммутатормутатора, а через интегратор - с вто- выполнеМ с двумя сигнальными и управ-рым входом сумматора, первый сигналь- ляющим входами, а датчик нагрузки ,ньв вход коммутатора подключен к вы- вьтолнен в виде датчика момента находу первого задатчика, второй сиг- валу двигателя и подключен к первомунальный вход коммутатора подключен входу сумматора и к первому входук выходу второго задатчика, а выход компаратора, второй вход которогокоммутатора подключен к третьему вхо- связан с выходом третьего задатчика, Qду сумматора, выход которого связан а выход компаратора связан через од-с усилителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления работой судового двигателя и гребного винта регулируемого шага | 1983 |
|
SU1128227A1 |
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ДОЗАТОРА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285140C2 |
| Устройство задания частоты вращения вала двигателя | 1986 |
|
SU1343067A1 |
| Устройство программного управления разогревом и охлаждением судового двигателя | 1983 |
|
SU1160084A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ГЛАВНОГО СУДОВОГО ДВИГАТЕЛЯ И ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1991 |
|
RU2037181C1 |
| Устройство ограничения частоты вращения двигателя | 1982 |
|
SU1016548A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| Система регулирования турбины | 1985 |
|
SU1295012A1 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
Изобретение позволяет повысить надежность работы системы. Устр-во содержит задатчики 1,2,3 режимов работы, датчик 4 момента на валу двигателя, компаратор 5, одновибратор 6, коммутатор 7, интегратор 8, сумматор 9, усилитель 10, исполнительный механизм 11 изменения шага винта. В случае, когда сигнал от датчика 4 не превышает величину уставки от за- датчика 3 на выходе компаратора, од- новибратора и интегратора, сформирован нулевой сигнал. При этом через коммутатор к третьему входу Сумматора подключен задатчик 2 и на механизм 11 через усилитель подается сигнал рассогласования между уставкой задат- чика 2 и датчика 4, обеспечивающий пропорциональное регулирование шага винта. При превышении сигнала от датчика 4 уставки задатчика 3 на выходе компаратора и одновибратора формируется единичный сигнал. Коммутатор подклкгчает к третьему входу сумматора задатчик 1. Сигнал на выходе сумматора в этом случае определяется разностью сигналов от задатчика 1 и датчика 4, что позволяет в указанном режиме обеспечить мощность 1:иловой установки, близкую к номинальной. Одновременно с этим по сигналу с выхода компаратора включается интегратор 8, сигнал от которого поступает на второй вход сумматора, что обеспечивает изменение шага винта и снижение нагрузки на двигатель. 1 ил. i (Л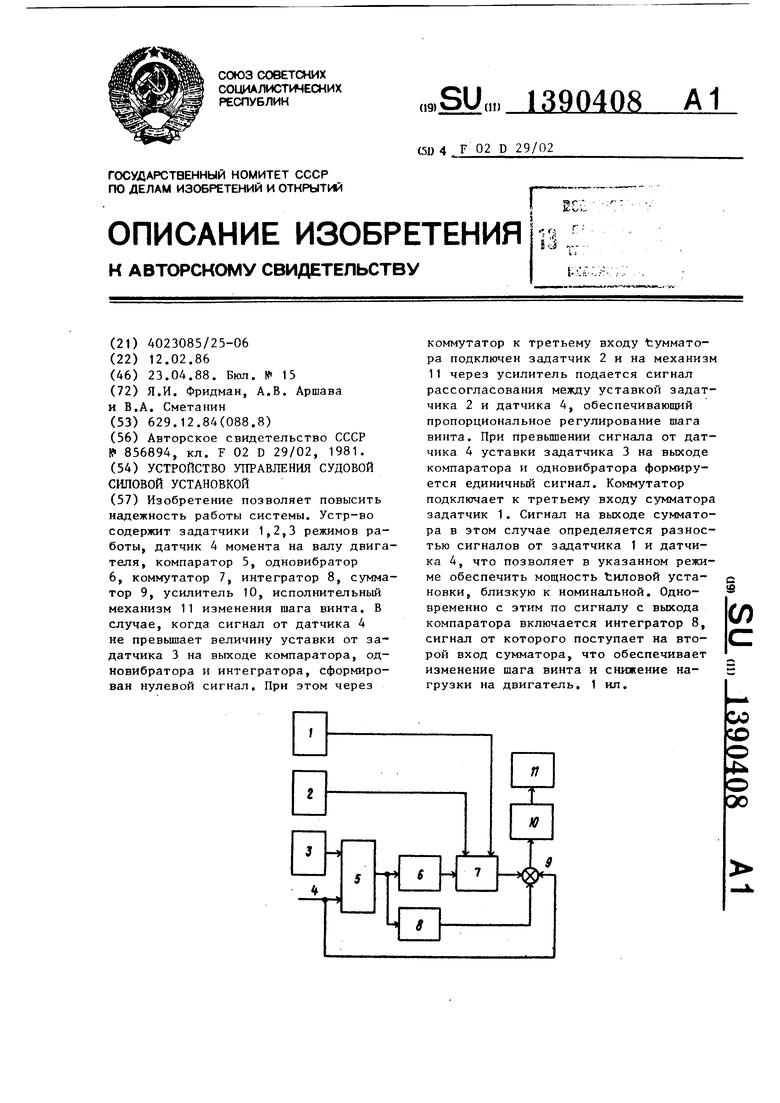
| Система управления главными дмигателями судовой силовой установки и винтом регулируемого шага | 1979 |
|
SU856894A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
