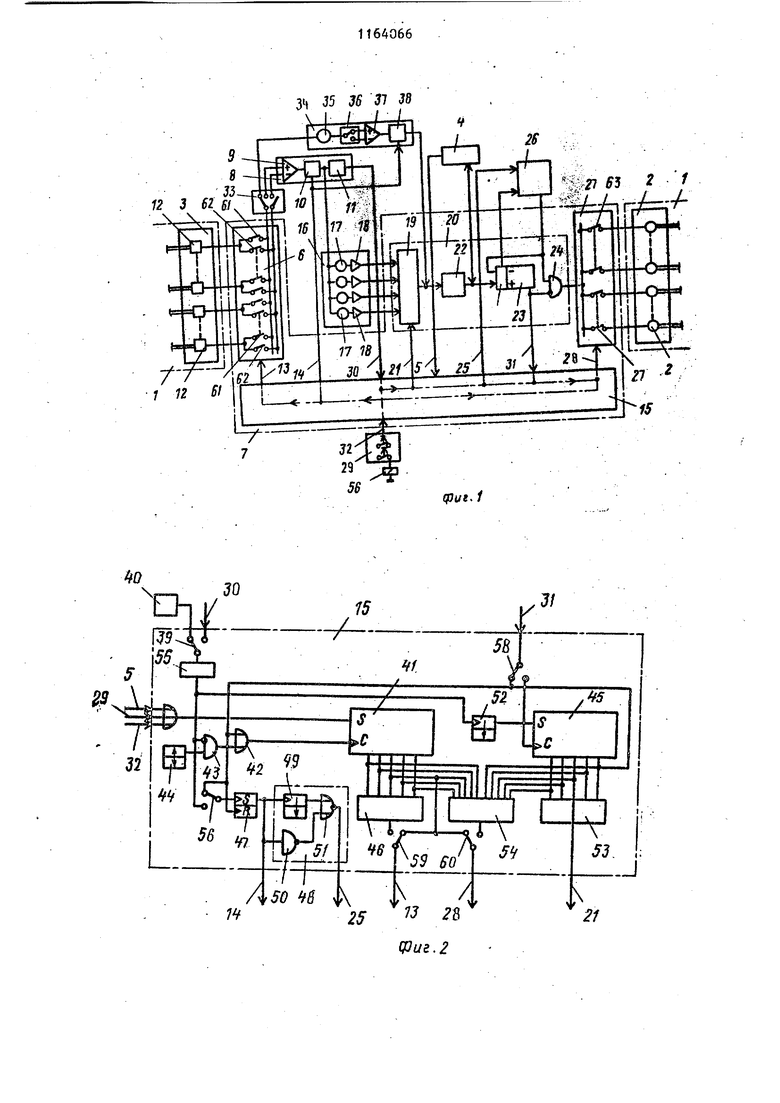
Изобретение относится .к устройствам управления для дистанционной перестановки цветовых зон и может быть использовано в печатных машинах. Известно устройство управления для дистанционной перестановки цветовых зон в исполнительной системе, кинематически связанной с опорными элементами красочного ножа и содержащей датчик положения и исполнитель ный привод, подключенные выходами к входам соответствующих входного и выходного мультиплексоров, блок программного управления, соединенный первыми выходами с управляющими входами входного и выходного мультиплексоров, вторыми выходами - с первыми входами блока управления при водом и третьим выходом - с первым ,,входом блока вычисления разности, связанного первым выходом через вычислительный блок с вторыми входами блока управления прхгаодом и вто-; рым выходом - с первым- входом блока программного управления, подключенного вторыми входами к первым выходам блока управления приводом, соедш1енным вторым выходом с входам выходного мультиплексора (Патент ГДР № 157959, кл. В А1 F 31/00, 1980).. Недостатком известного устройства являются невысокие функциональны возможности. Цель изобретения - повьшюние фун циональных возможностей устройства. . Поставленная цель достигается те что устройство управления для дистационной перестановки цветовых зон в исполнительной системе, кинематически связанной с опорными элементa ш красочного ножа и содержащей датчик положения и исполнительный привод, подключенные выходами ко вх дам соответствующих входного и выхо ного мультиплексоров, блок программного управления, соединенный первы ми выходами с управляющими входами входного и выходного мультиплексоро вторыми выходами - с первыми входам блока управления приводом и третьим выходом - с первым входом блока вычисления разности, связанного первы выходом через вычислительный блок с вторыми входами блока управления приводом и вторым выходом с первым входом блока программного управлени подключенного вторыми входами к пер вым входам блока управления приводом, соединенным вторым выходом с входами выходного мультиплексора, имеет переключательньй блок и дополнительный вычислительный блок, выход которого соединен с третьим входом блока управления приводом, выходы входного мультиплексора через переключательньй блок соединены с вторыми входами блока-вычисления разности и первым входом дополнительного вычислительного блока, второй вход которого подключен к третьему выходу блока программного управления. Дополнительный вычислительный блок имеет потенциометр, переключатель, операционный усилитель и элемент памяти, первый вход которого соединен с третьим выходом блока программного управления, один из выходов переключательного блока через последовательно соединенные потенциометр , переключатель и операци онный усилитель подключен к второму входу элемента памяти соединенного выходом с третьим входом блока програ ного управления. На фиг. 1 приведена блок-схема устройства управления для дистанционной перестановки цветовых зон с множительным устройством подачи; на фиг. 2 - схема блока программного управления. Блок-схема предлагаемого устройства содержит исполнительную схему 1, исполнительный привод 2, датчик 3 положения, узел 4 ввода - выт вода информации, линию 5 ввода, входной мультиплексор 6, схему 7 управления, блок 8 вычисления разности, дифференциальньй усилитель 9, элемент 10 йамяти, формирователь 11 итогового значения, потенциометр 12, ЛИНИР1 13 и 14 связи, блок 15 программного управления, вычислительный блок 16, потенциометры 17, операционные усилители 18, мультиплексор 19, узел 20 управления приводом, линия 21 связи, аналого-цифровой преобразователь (АЦП) 22, схему 23 сравнения, первую схему И 24, линию 25 связи, моторный датчик 26 импульсов, выходной мультиплексор 27 линию 28 связи, управляемое вручную пусковое устройство 29, линию 30 связи, линии 31 и 32 связи, переклю-i чательный блок 33, дополнительный вы
числительный блок 34,. потенцив-. метр 35, переключатель 36, операционный усилитель 37, элемент памяти 38, переключающий контакт 39, узел 40 формирования сигнала L, счетчик ,41, схему ИЛИ 42, схему И 43 стабильный мультивибратор 44, сдвигающий регистр 45, первый дешифратор 46, бистабильный мультивибратор 47, звено 48 задержки, первый моностабильный мультивибратор 49, схему НЕ 50, схему НЕ-ИПИ 51, второй моностабильный мультивибратор. 52, второй дешифратор 53, третий дешифратор 54, узел 55 предельных значений, первый переключатель 56,реле 57, второй переключатель 58, третий переключатель 59, четвертый переключатель 60,
Входной мультиплексор 6 имеет контакты 61 и 62. Выходной мультиплексор 27 содержит контакты 63. Блок управления приводом включает в себя узел 2.0 управления приводом, моторный датчик 26 импульсов и узел ввода вывода информации. При этом выход дополнительного вычислительного блока 34 соединен с третьим входом блока управления приводом, выходы входного мультиплексора 6 через переключательньй блок 33 соединены с вторыми входами блока 8 вычисления разности и первым входом дополнительного вычислительного бло ка 33, второй вход которого подключен к третьему выходу блока 15 программного управления.
В дополнительном вычислительном блоке 34 первый вход элемента памяти 38 соединен с третьим выходом блка 15 программного управления, один из выходов переключательного блока 33 через последовательно соединеные потенциометр.35, переключатель 3 и операционный усилитель 37 подключен ко второму входу элемента 38 памяти, соединенного выходом с третьим входом блока 15 программного управления.
т После включения устройство работает следующим образом.
Первый переключатель пускового устройства 29 управляется реле 57. Тем самым через переключательный блок 33, переключающий конта1 т 40 и переключатели 56 - 60 устройство переключается на функцию приравнивания. Одновременно, управлением первым переключателем линии 32 связи создается команда Н..
Контакты 61 и 62 входного мультиплексора 6 первой схемы управления запущенной посредством команды.Н и управляемой вручную пусковым устройством 29, Соед1шяют соответственно управлению посредством команды измеренные значения лежащих рядом двух первых потенциометров 12 исполнительного измерительного датчика 3, принадлежащего к исполнителной системе 1. Так, например, оба измеряемых напряжения расположенных рядом потенциометров 12 через контакты 61 и 62 появляются на дифференциальном ус1тителе 9. У выхода дифференциального усилителя 9 появляется разностное напряжение обоих измеренных значений и запоминается посредством соответствующей команды в элементе памяти 10. Значение разностного напряжения появляется на выходе форм фователя 11 ито .гового значения и в качестве команды на выходе блока 15 программного управления. Формирователь 11 итогового значения можно построить с помощью операционных усилителей. Итоговое значение необходимо для опрегделения превышений предельных значений в блоке 15 программного управления. Заданное значение для приравнивания прерывного хода позиций опорных элементов красочного ножа в непрерывной функции линш изгиба ножа вычисляется из разностного напряжения, приложенного к выходу элемента 10 памяти, в блоке 16 с. помощью аналоговой вычислительной схемы, состоящей из коэфф1щиентных потенциометров 17 и последующий первых операционных усилителей для исполнительных систем 1, подключаемых с обеих сторон. В данном случае расчет четырех заданных значений, соответствующих четырем исполнительным системам представлен на фиг. 1 . Эти -заданные значения ггодводятся от мультиплексора 19 узла 20 через АЦП 22 к схеме сравнения 23. С помощью мультиплексора 19, управ-/ ляемого блоком программного управления 15 посредством команды управления, узел 20, имеющийся в одном экземпляре, упорядочивается на стороне входа и выхода большому числу исполнительных систем 1. Схема 23
сравнения является реверсивным счетчгасом со знаковым элементом памяти. Схема сравнения 23 устанавливается от АЦП 22 и затем возвращается до значения О посредством импульсов моторного датчика 26 импульсов. При значении ноль появляется команда, которая блокирует первую схему И 24 для дальнейших импульсов моторного датчика импульсов 26, и действует на блок 15 программного управления. Так как импульсы моторного датчика 26 импульсов соответствуют регулирующей величине, то этим осуществляется в сравнения 23 сравнение.заданного значения и регулирующей величины. Моторный датчик импульсов 26 управляется от соответствующей команды блока 15 программного управления. При этом элемент знаковой памяти устанавливает направг |ление вращения.
Выходной мультиплексор 27, койтрол1фуемый блоком 15 программного управления посредством команды 7, соединяет через контакты 63 исполнительный .привод 2, принадлежащий к исполнительной системе 1. Н примере выполнения устройства выходной мультиплексор 27 упорядочивает выход управления до приложения соответствующей команды через контакты 63.
Когда процесс приравнивания окончен, то отпускается реле 57, и устройство переключается на множительную подачу.
. Устройство устанавливается на постоянное зна.чение процентной подачи Дпя увеличения значения подачи необходим многократный пуск.
Устройство -может применяться через переключатель плюс - 36 как для положительной, так и для отрицательной процентной подачи.
Включение процесса подачи осуществляется через второй переклкзчатель пускового устройства 29 или через узел ввода и вывода 4. Это измеренное значение через блок 33 поступает
в блок 34. Вычисленное значение подачи обрабатывается дальше через элемент памяти 38 с помощью АЦП 22. Блок 16 и мультиплексор 19 при этом не работают.
Через линии 13 и 28 связи постоянно управляются двигатели или потенциометры, принадлежащие к той же исполнительной . При этом осуществляется последовательная отработка.
На входе узла 55 предельных значений имеется сигнал L, благодаря чему блокируется вторая схема И 43. Через линию 31 связи и второй переключатель 58 последовательно включается через бистабильный мультивибратор 47 вторая линия 14 связи, одновременно последовательно включается через звено задержки 48 линия 25 связи так, что после подачи одной исполнительной системы обрабатывае тся следующая исполнительная система.
Использование изобретения повьшает функциональные возмояиости устройства.
Признано изобретением по результатам экспертизы, осуществленной Ведомством по изобретательству Германской Демократической Республики.
35 36 31 J8 Л f e C3--И ttf / 1 n SI cputJ ZJ 55 / / Ibfcir Ш4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного регулирования подачи краски на печатных машинах (его варианты) | 1981 |
|
SU1451053A1 |
| Процессор программируемого контроллера | 1984 |
|
SU1269150A1 |
| Устройство для измерения временных параметров программ | 1982 |
|
SU1136109A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840108A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840138A1 |
| Устройство для программного управления многокоординатным манипулятором | 1981 |
|
SU985762A1 |
| Рекурсивное вычислительное устройство | 1980 |
|
SU881770A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Функциональный аналого-цифровой преобразователь | 1983 |
|
SU1113813A1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
Г. УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕСТАНОВКИ ЦВЕТОВЫХ ЗОН В ИСПОЛНИТЕЛЬНОЙ СИСТЕМЕ,, кинематически связанной с опорными элементами красочного ножа и содержадей датчик положения и. исполнительный привод, подключенные выходами ко входам соответствующих входного и выходного мультиплексоров, блок программного управления, соединённый первыми выходами с управляющими входами входного и выходного мультиплексоров, вторыми выходами с первыми входами блока управления v приводом и третьим выходом - с пер вым входом блока вычисления разности связанного первым выходом через вы. числительный блок с вторыми входами, блока управления приводом и вторым .выходом с первым входом блока проrpabdMHoro управления, подключенного ; вторыми входами к первым входам блока управления приводом,- соединеи- ным вторым выходом с входами выходного мультиплексора, о т Лг ич а е е с я тем, что оно имеет переключательньй блок и дополнительный вычислительный блок, выход которого соединен с третьим входом блока управления приводом, выходы входного мультиплексора через переключательный. блок соединены с вторыми входами блока вычисления разности и первым входом дополнительного вычислительного блока, второй вход которого подключен к третьему выходу блока программного управления... (Л 2. Устройство по п. 1, о т л и- i с чающееся тем, что дополнительный вычислительный блок имее потеит. циометр, переключатель, операционный усилитель и элемент памяти, первый .. вход которого соед1шен с третьим выходом блока программного управлесь ния, один из выходов переключательN о а ного блока через последовательно соединенные потенциометр, переключатель и операционный усилитель под- . 05 ключей к второму входу элемента па-, мяти, соединеиного выходом с третьим : входом -блока программного управле|ния-. - . ..