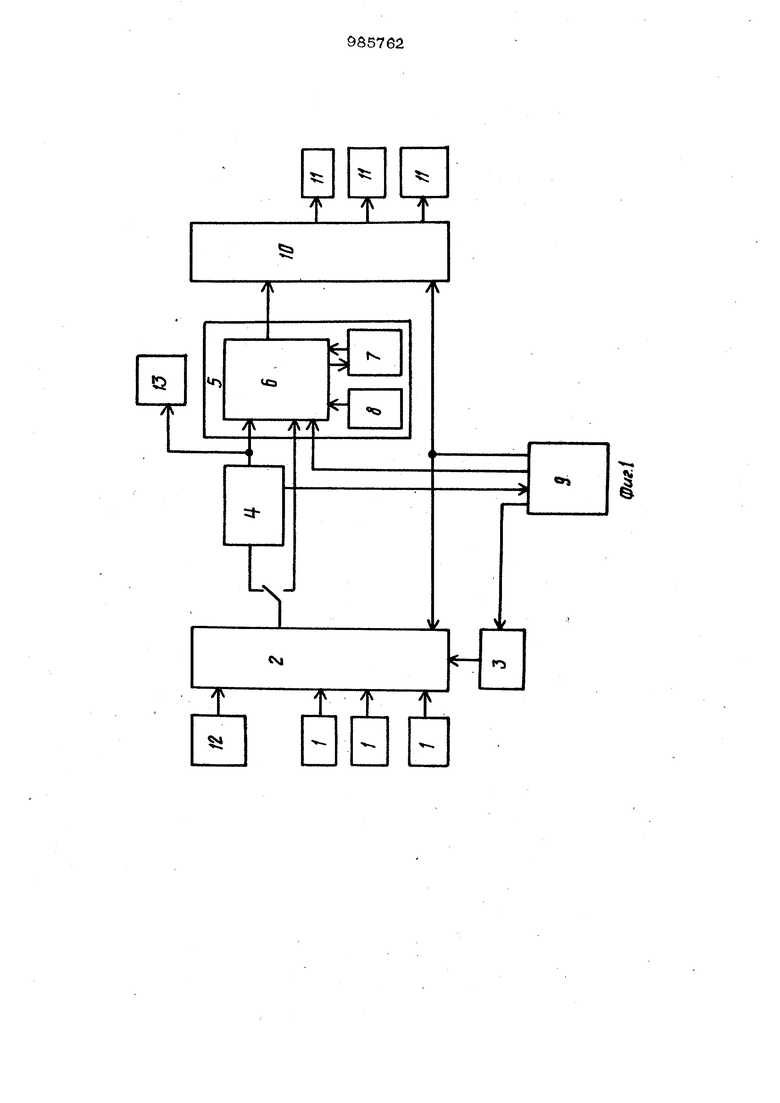
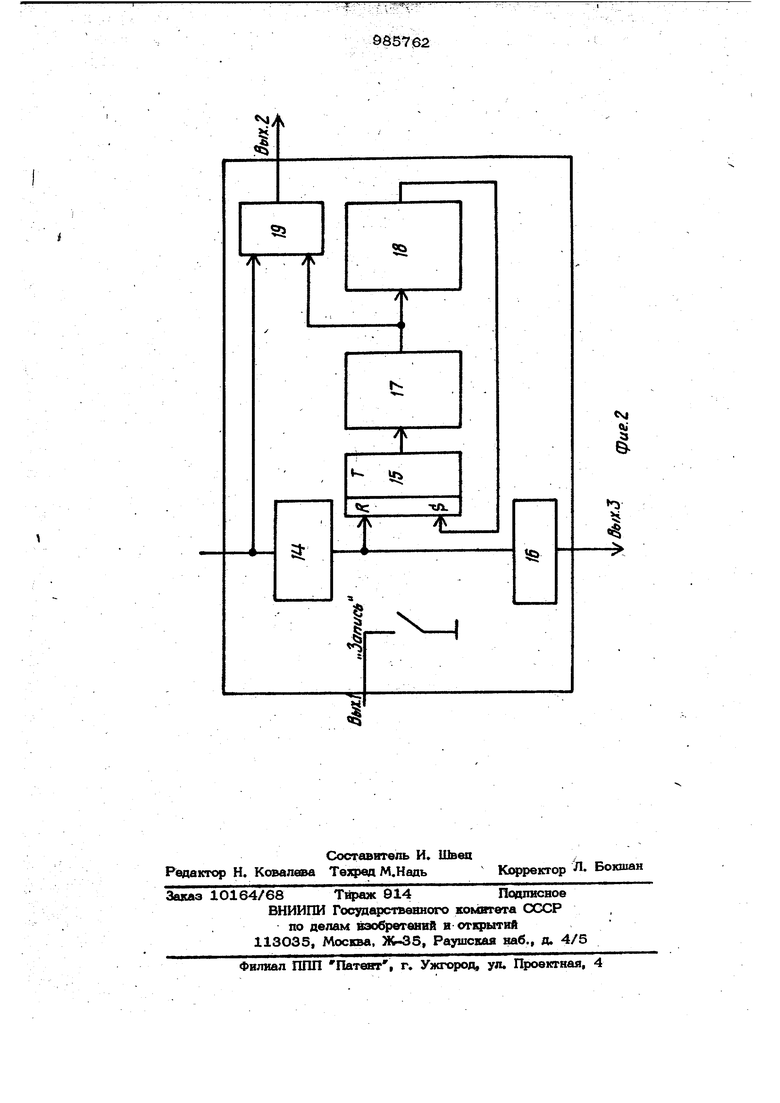
(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МНОГОКООРДИНАТНЫМ МАНИПУЛЯТОРОМ Изобретение относится к системам цифрового программного управления многокоординатным манипулятором, рабочий орган которого перемещается по заданному контуру, например для окраски или газовой резки. Известна система для контурного управления промышленным роботом, содер жашая блок памяти, приводы, датчики обратной связи по положению С1 3 Для обеспечения необходимой точности перемещения рабочего органа по заЛ данному контуру система осуществляет управление по абсолютному значению каж дой координаты и по скорости. Для этого система по каждой координате имеет дополнительно блок задания скорости и датчик скорости, что усложняет систему. Недостатком системы является большой вес, применяемых в ней в качестве дат чиков скорости тахогенераторов, которые размещакггся на соответствующих приводах звеньев манипулятора, утяж&ляют руку, повышают ее инерционность и величины динамических ошибок, пер&мешения рабочего органа. Наиболее близкой к предлагаемой 5голяется система программного упра&ления промышленным роботом, содержащая генератор импульсов, логический блок, блок набора переключателей блок памяти и дешифратор 2 . Недостатками известного устройства являются сложность конструкции и невозможность вычисления регулирующего воздействия, отсутствие возможности кок пенсации скоростной ошибки. Цель изобретения - упрощение конструкции. Поставленная цель достигается тем, что в устройство для программного управления многокоординатным манипулятором, содержащее генератор тактовых импульсов, входом соединенный с первым входом логического блока, блок набора ереключателей, блок памяти, первым выходом подключенный к входу дешифратора, демуль типлексор, и датчики положения, введ&ны мультиплексор, и вычислительный блок, выходом соединенный с входом демультиллексора, первым входом - с выходом блока памяти, вторым входом - с вторым выходом логического блока, третий выход которого подключен к первому входу мультиплексора, вторым входом соединенного с выходом бло1са набо ра переключателей, а третьими входами с выходами датчиков положения, вторбй выход блока памяти подключен к входу логического блока, а также тем, что логический блок содержит выключатель, элемент ИЛИ, счетчик номера координат и последоватедьно соединенный первый делитель частоты, S -триггер, генератор импульсов, и второй делитель частоты, выход которого подключен на 5 -вхо RB -триггера, вйход генератора импульсов соединен с первым входом элемента ИЛИ, второй вход которого соединен с входом первого делителя частоты и входом блока, а овыход элемента ИЛИ - с вторым выходом блока, выход счетчика номера координат подключен к третьему выходу блока, а первый выход к выключателю. . На фиг. i изображена блок-схема предлагаемого устройства; на фиг. 2 схема логического блока. Устройство содержит датчик 1 обрат ной связи, мельтнплексор 2, генератор 3 тактовых импульсов, блок 4 памяти, вычислительный блок 5, арифметический блок 6, оперативный запоминающий элемент 7, пос -оянный запоминающий 8 элемент, логический блок 9, демультиплексор 10, приводы 11, набор 12 переключателей, дешифратор 13. Логическ блок 9 содержит первый делитель 14 ча тоты, R5 -триггер 15, счетчик 16 номе ра координат, генератор 17 импульсов, второй делитель 18 частоты и элемент ИЛИ 19, Устройство содержит датчики 1 о&ратной сБязи число которых равно числу координат манипулятора. В качестве датчиков обратной связи используются кодовые датчики, или импульсные и аналоговые датчики с соответствующими преобразователями положения в код. Мультиплексор 2 служит для преобрааоBaiiHH п -разрядной входной информации по N -каналам в один канал с определенной последовательностью и частотой, рпределяемой г-енератором 3 тактовых мпульсов. Блок 4 памяти представляет обой накопитель на магнитной ленте магнитофон), на магнитных дисках т.п. Вычислительный блок 5 служит для ычисления регулирующего воздействия о закону ) r(b.S де:/: - регулирующее воздействие но i -кокоординате;Вх « текущее значение программы по соот ветствующей координате;ВЫХ текущее значение координаты по показанию датчика обратной связи; дх. ийХц,- прирдшения соответвтенно значений X g и X вь,х за период управления. В вычислительный блок 5 входят арифметический блок 6, оперативный запоминающий элемент 7 для : фанения, значений координат X X выл предыдущего периода, необходимых для вычисл&ния значений соответствующих приращений Д Xgy . и uXg(j,., а также постоянный запоминающий элемент 8 для зфанения значений коэффициентов К и К2, постоянных для данного манипулятора. Логический блок 9 служит для координации и выдачи управляющих воздействий на все блоки системы, более рациональной является замена вычислш-ельного блока 5 и логического блока 9 дешевой микро-ЭВМ с небольшим количеством разрядов и невысоким быстродействием. Демультиплексор 10 служит для подключения к выходу вычислительного блока 5 привода 11 соответствующей координаты. Устро тво имеет блок 12, служащий для записи технологических команд при обучении, представл5пощих собой набор переклкнателей, которые переключаются вместо нескольких незадейс твованных разрядов i -координаты. Вьзделение записанных команд и подача их на технологическое оборудование осущест вляется дешифратором 13 технологичеоких команд. Устройство работает следующим об . разом. В процессе обучения перемешают нополнитепьный орган манипулятора по н&обходимой траектории и с требуемой скоростью. При этом информация с дат чиков 1 обратной связи поочередно с частотой генератора 3 тгактовых импульсов (например 5 кГц) через мультиплексор 2 поступает на блок 4 памяти н записывается. При воспроизведении информации для вьшолнепия манипулятором работы из блока 4 памяти в вычислительный блок 5 поступают поочередно значения Хехпрограммы в том же порядке, в котором они били записаны при обучении, и с той же частотой {5 кГц). Логический блок 9 определяет номер координаты, по которой в данный момент поступает информация из блока памяти и со своего второго .выхода подает сигнал номера координаты на мультиплексор 2 и д&мультиплексор 10, обеспечивая этим самым подключение к вычислительному блоку 5 задатчика 1 обратной связи и привода 11 соответствующей координаты Со второго выхода логического блока 9 на третий вход вычислительного блока 5 подаются импульсы с частотой 5 кГц, обеспечивающие продвижение постулающе|ГО последовательного кода программы в параллельный KOJEI, а после каяадого п ro импульса (завершающего прием п -разрядного кода программы по координате) в паузе подается серия импульсов вь сокой частоты .например 500 кГц, обес печивающая упразаление операциями вычисления регулирующего воздействия в соответствии с приведенной выше формулой в обработку его приводом 11 данной координаты. Затем блок 4 памяти вьщает программу по следующей координате, которая обрабатывается аналогичным образом. для управления приводом этой коор динаты.. . Неведением в fрегулирующее воэдей- пропорциональствие величины ной первой разности от программы, достигается компенсация скоростной ошибки в соответствии- с комбинированным прш ципом управления. Введение величины Кл Л Xgi,,, пропорциональной первой разности от перемещения позволяет осуществить обратную связь по скорости без применения тдхогенератора. Так как интервал дискретности (при частоте тактовых импульсов 5 кГц, число координат манипулятора N 6 и количестве разряи дов кода по координате г 12 интервал дискретности равен 0,О144, с) значитель но меньше постоянных времени инерционных GseHbBB, входящих в систему, то погрешность от замены производных конечн ными разностями достаточно мала. Экономический эффект от упрощения конструкции аоставит тыс. руб. на одну систему в с{)авненни с авалогич- ной по назначению и техническим характеристикам системой УКМ-еб2. Формула изобретен ия Устройство для программного управления многчэкоординатным манипулятором, содержащее генератор тактовых импульсов, входом соедщгенный с первым входом логического блока, блок набора переключателей, блок памяти, первым выходом подключенный к входу дешифратора, д& мультиплексор и датчики положения, о т - личающ еся тем, что, с целью упрощения конструкции в него введены мультиплексор и вычислительный блок, выходом соединенный с входом демультвплексор а, первым входом - с выходом , блока памяти, вторим входом - с вторым ш 1ходом логического блока, третий выход которого подключен к перво му входу мультиплексора, вторым входом соединенного с выходом блока набора, переключателей, а третьими взаодгн. ми - с выходами датчиков положения, второй выход блока памяти подключен к входу логического блока 2. Устройство ,по П.1, отличающееся тем, что,, (логический блок содержит выключатель, элемент ИЛИ, номера координаты и последовательно соединенные первый делитель частоты, { 5-трщтер, генератор импульсов и второй делитель частоты, выход которого подклкяен на S-вход R 5-триггера, выход генератора импульсов сочинен с первым входом элемента ИЛИ, второй вход которого соединен с входом лервого делителя частоты и входом блока, а выход элемента ИЛИ - с вторым выходом блока, выход счетчика номера KOOI дкаат подключен к третьему выходу блока, а первый выход - к вьпслючателю. Источники информации, принятые во внимание при экспертизе .1, Авторское сввдетельство СССР № 653597, КЛ. Gi 05 В 19/4О, В 25J 9/ОО 1978. 2. Авторское свидетельство СССР № 67540О, КЛ. GI 05 В 19/18, В 25 J 9/ОО, 1978 (прототип).
Г
Т Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| Формирователь импульсных последовательностей для контроля запоминающих модулей на цилиндрических магнитных доменах | 1987 |
|
SU1513514A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1995 |
|
RU2096801C1 |
| Устройство программного управления | 1984 |
|
SU1246055A1 |
| Устройство для отображения информации на экране телевизионного индикатора | 1986 |
|
SU1441449A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Система телемеханики для управления передвижкой секций шахтной гидрокрепи | 1985 |
|
SU1269171A1 |
| УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ВИДЕОСИГНАЛА | 1992 |
|
RU2042201C1 |
| СТЕНД ДЛЯ ИЗУЧЕНИЯ ГИБРИДНЫХ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2012 |
|
RU2493609C1 |
о
г
иэ
/. 7 Г Г
CN4
W
1
54
«41
«- to
Г
-
is
