Известные интегрирующие устройства для интегрирования дифференциальных уравнений 2-го порядка, содержащие функциональный и вычислительный блоки, предназначенные для получения необходимых функциональных зависимостей и производства вычислений, не приспособлены для интегрирования функций по невременному аргументу и не могут обеспечить получение интеграла в виде кривой в декартовой системе координат.
Предлагаемое устройство отличается применением в качестве интегрирующего звена трехколесной каретки, которая приводится в движение с помощью следящей системы. Датчиком следящей системы служит роторная обмотка вращающегося трансформатора, статорные обмотки которого подключены к функциональному блоку - одна непосредственно, а другая - через вычислительный блок. Указанное отличие позволило обеспечить интегрирование по иевременному аргументу и получить интеграл в виде кривой в декартовой системе координат.
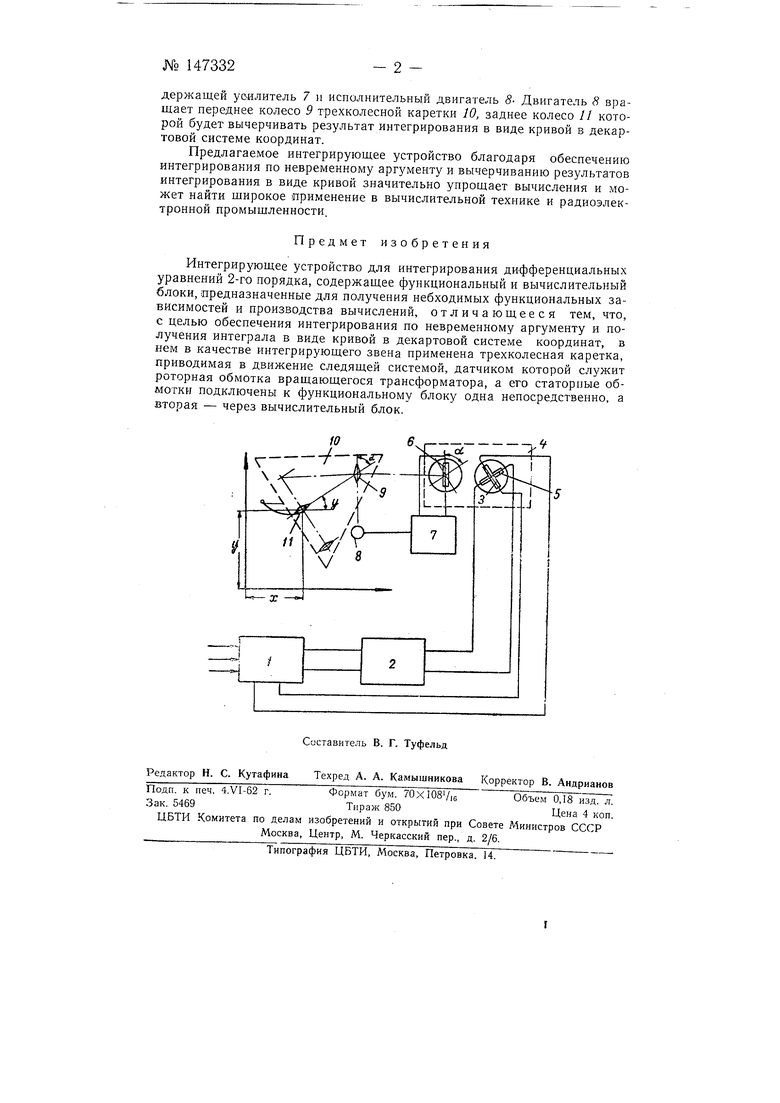
На чертеже изображена принципиальная схема предлагаемого ин тегрирующего устройства.
Величины л;, i/ и , вводятся в функциональный блок 7, на выходе
которого получаем напряжение в виде некоторой функции от этих величин, например, fi (х, у, .г-}. Это напряжение подается в вычислительный блок 2, куда также вводится текущая величина ф - угла, образованного между касательной к кривой /2 у(-) и положительным направлением оси абсцисс- Выходное напряжение с вычислительного блока / в виде некоторой функции fs подается на косинусную обмотку вращающегося трансформатора 4, на синусную обмотку 5 которого подается напряжение непосредственно с функционального блока /.
В зависимости от напряжений, поданных на обмотки 5 и 5 вращающегося трансформатора 4, будет изменяться угол а - угол поворота роторной обмотки 6, которая служит датчиком следящей системы, содержащей усилитель 7 и исполнительный двигатель 5- Двигатель 8 вращает переднее колесо 9 трехколесной каретки 10, заднее колесо // которой будет вычерчивать результат интегрирования в виде кривой в декартовой системе координат.
Предлагаемое интегрирующее устройство благодаря обеспечению интегрирования по невременному аргументу и вычерчиванию результатов интегрирования в виде кривой значительно упрощает вычисления и может найти щирокое применение в вычислительной технике и радиоэлектронной промыщленности.
Предмет изобретения
Интегрирующее устройство для интегрирования дифференциальных уравнений 2-го порядка, содержащее функциональный и вычислительный блоки, предназначенные для получения небходимых функциональных зависимостей и производства вычислений, отличающееся тем, что, с целью обеспечения интегрирования по невременному аргументу и получения интеграла в виде кривой в декартовой системе координат, в нем в качестве интегрирующего звена применена трехколесная каретка, приводимая в движение следящей системой, датчиком которой служит роторная обмотка вращающегося трансформатора, а его статорные обмотки подключены к функциональному блоку одна непосредственно, а вторая - через вычислительный блок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для автоматического построения траекторий движения заряженных частиц в электрических и магнитных полях | 1956 |
|
SU116444A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ ТРАЕКТОРИЙ | 1973 |
|
SU397929A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Устройство для формирования дозных полей | 1974 |
|
SU576684A1 |
| Устройство для вычисления двойного интеграла | 1975 |
|
SU545993A1 |
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
| Цифро-аналоговая следящая система | 1981 |
|
SU1029143A1 |
| Прибор для автоматического построения траекторий движения заряженных частиц в электрических полях | 1956 |
|
SU113407A1 |
| Устройство для интегрирования | 1983 |
|
SU1108470A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
