Известные электронные стенды, имитирующие управляемость продольного и бокового движения самолета, включающие в себя кабину, оборудование самолета, а также моделирующие устройства, имитирующие воздействие внешней среды и задаваемых параметров на приборы и органы управления, не обеспечивают визуализации относительного положения неба и земли при выполнении неограниченных маневров и при воздействии любых порывов и струйных течений.
Предложенный стенд устраняет эти недостатки.
Сущность изобретения заключается в том, что электронная модель соединена с трехкомпонентным исполнительным механизмом, снабженным двумя взаимно-перпендикулярными каретками, несущими на себе диапозитив, изображение которого проектируется на экран, установленный перед летчиком, а преобразование координат, обеспечивающее горизонтальность перемещения диапозитива при рыскании и вертикальность при изображении тангажа, независимо от величины крена, достигается двумя синусно-косинусными потенциометрами, из которых на один подается напряжение тангажа, а на другой напряжение, соответствующее рысканию.
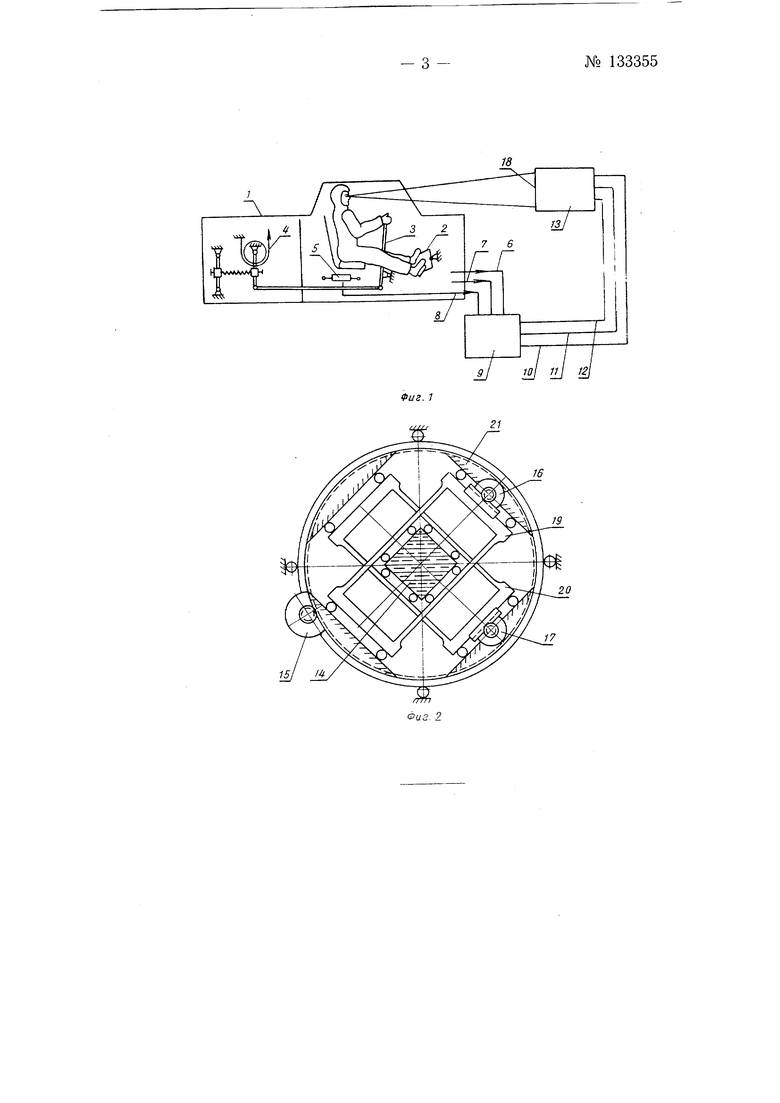
На фиг. 1 изображена блок-схема стенда; на фиг. 2-кинематическая схема трехкомпонентного исполнительного механизма.
В кабине / расположены органы управления, включающие в себя педали 2 и ручку 3, связанные с механизмами 4 загрузки, воспроизводящими величину и градиент усилия на рычагах управления. Датчики 5, установленные во всех каналах управления, выдают напряжения 6, 1 и 8, пропорциональные отклонению соответствующих рулей. Эти сигналы в виде напряжений 6, 7 к 8 поступают в электронную модель 9, на которой набраны характеристики самолета и режимы полета.
№ 133355- 2 Выходные напряжения 10, 11 и 12 электронной модели 9, представляющей собой интегратор, воспроизводят углы тангажа, рыскания и крена в зависимости от набранной задачи. Выходные напряжения 10, 11 и 12 подаются на расположенный в проекторе 13 трехкомпонентный исполнительный механизм, состоящий из диапозитива 14, совершающего плоское трехкомпонентное движение, трех следящих систем, электродвигатели 15, 16 и П которых отрабатывают в виде перемещений напряжений 10, 11 и 12 интегратора, соответствующих тангажу, рысканию и крену. Движения от валов двигателей 15, 16 и 17 с помощью редукторов передаются диапозитиву 14, изображение которого проектируется на экран 18, стоящий перед летчиком. Крен моделируемого самолета имитируется в натуральном масштабе поворотом кареток 19 и 20 с диапозитивом 14, смонтированных на поворотной платформе 21, вокруг оси перпендикулярной плоскости диапозитива. Тангаж и рыскание воспроизводятся одновременным поступательным перемещением диапозитива 14 на каретках 19 -я 20 ъ двух взаимно-перпендикулярных направлениях. Горизонтальность перемещения диапозитива 14 при рыскании и вертикальность при изображении тангажа независимо от величины крена осуществляется преобразованием координат при переходе от напряжений модели к перемещениям диапозитива 14 при помощи двух синуснокосинусных потенциометров (на чертеже не показаны), соединенных с платформой 21 редуктором и раскладывающих напряжения модели // и 12, соответствующие тангажу и рысканию, на горизонтальную и вертикальную составляющие при данной величине крена.
Предмет изобретения
. Стенд для имитирования управляемости продольного и бокового движеЕи я самолета, например, при исследовании динамики последнего, включающий в себя электронную модель, трехкомпонентную следящую систему, взаимодействующую с исполнительным механизмом, отличающийся тем, что, с целью обеспечения визуализации относительно положения земли и неба при выполнении неограниченных маневров, а также при воздействии любых порывов и струйных течений, трехкомпонентный исполнительный механизм снабжен двумя взаимно-перпендикулярными каретками, несущими на себе диапозитив, изображение которого проектируется на экран, установленный перед летчиком.
2. Стенд по п. 1, отличающийся тем, что, с целью преобразования коордипат, обеспечиваюндего горизонтальность перемещения диапозитива при рыскании и вертикальность при изображении тангажа независимо от величины крена, он снабжен двумя синусно-косинусными потенциометрами, из которых на один подается напряжение тангажа, а на другой напряжение, соответствующее рысканию.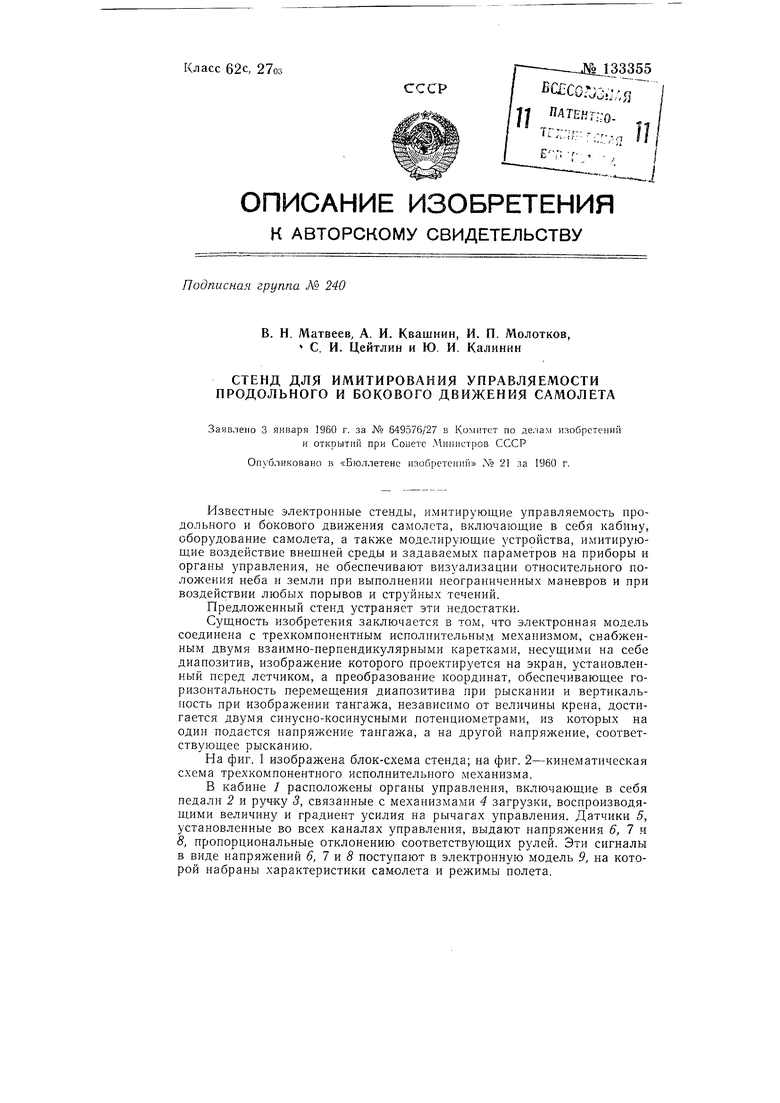
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для моделирования визуальной ориентировки летчика при взлете и посадке самолетов | 1961 |
|
SU150017A1 |
| Устройство для имитации видимости в сложных метеусловиях | 1972 |
|
SU501408A1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| ВЕРТОЛЕТ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ | 2003 |
|
RU2265555C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |