Изобретение относится к геофизике конкретнее к телеуправляемым гравиметрическим измерениям.
Известен способ измерения силы тяжести телеуправляемым гравиметром, включающий принудительное инвилирование корпуса с чувствительной системой, компенсацию относительных изменений силы тяжести и измерение величины компенсирующей силы 1 .
Недостатками способа являются низкое быстродействие, обусловленное необходимостью на каждом пункте измерения точной (± 10-15) установкой корпуса с чувствительной системой в исходное положение и громоздкость системы нивилирования, затрудняющая использование в условиях ограниченных размеров, например, в,скважинных гравиметрах.
Известен также способ измерения силы тяжести телеуправляемым граниметром, включающий самонивилирование корпуса с чувствительной системой, компенсацию относительных изменений силы тяжести и измерение компенсирующей силы. Этот способ за счет самонивилирования увеличивает быстродействие измерений .
Однако недостатками способа являются низкие точность и надежность
единичного измерения из-за возмож нбсГти отклонения корпуса с чувствительной системой от исходной оси (например, вертикали). Причинами существенных погрешностей при работе гравиметра с самонивилированием являются жесткость подводящих проводников, трение, люфты, неточности в изготовлении подвеса Кардана, возможность касания корпуса с неподвижными ребрами при его расположении в жидкости высокой плотности, изменения условий работы с температурой (особенно для скважинных гравиметров) пустимые углы наклона корпуса составляют для погрешностей порядка 0,01 мГал.
Наиболее близким техническим решением к предлагаемому является способ измерения ускорения силы тяжести телеуправляемым гравиметром, содержащим корпус и чувствительную систему, включающий компенсацию относителных изменений силы тяжести и измерение компенсирующей силы, по величине которойсудят об относительном изменении ускорения, силы тяжести з.
Недостатком известного способа являются низкие точность и надежность измерений из-завозможности отклонения корпуса с чувствительной системой от исходной оси (например, вертикали),
Цель изобретения - повышение точности измерений.
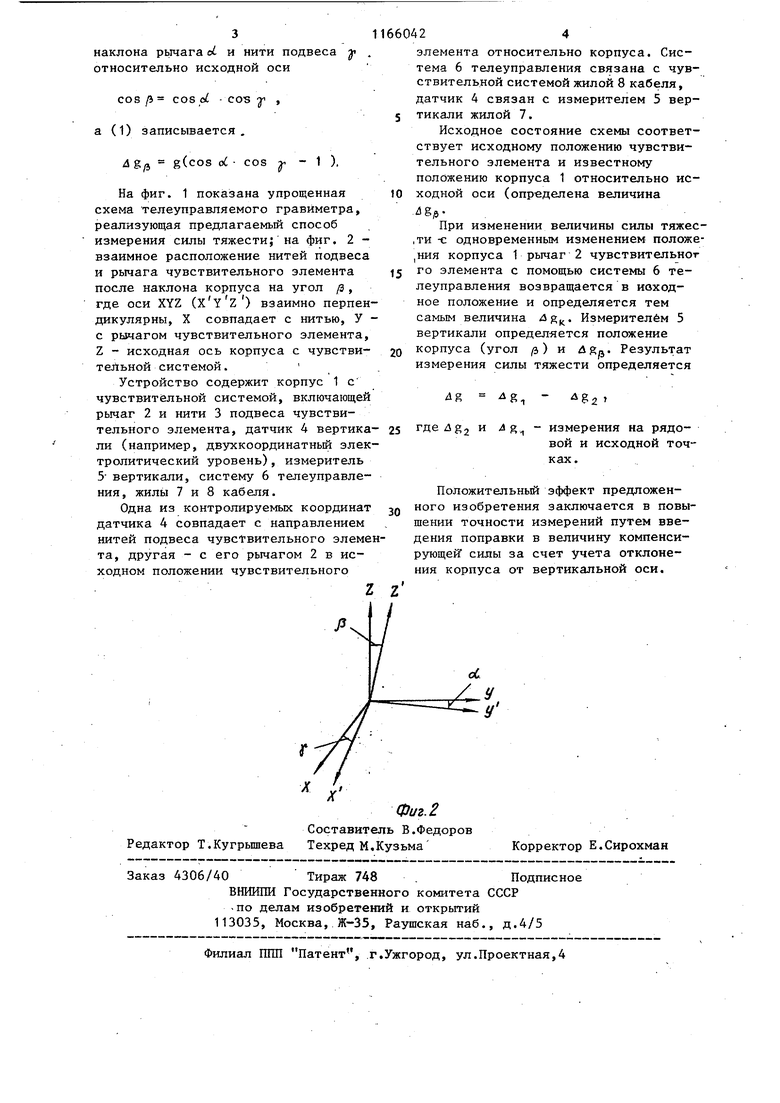
Цель достигается тем, что согласно способу измерения ускорения силы тяжести .телеуправляемым гравиметром, содержащим корпус и чувствительную систему, включающему компенсацию относительных изменений силы тяжести и измерение компенсирующей силы, по величине которой судят об относительном изменении ускорения силы тяжести, в исходном положении чувствительного элемента не менее двух раз дополнительно измеряют угол наклона корпуса с чувствительной системой и по результатам измерений рассчитывают поправку, которую вводят в величину компенсирующей силы.
При наклоне чувствительной системы на угол /3 в произвольном направлении изменение силы тяжести составит
4g/5 g(cos ;3 - 1) (1) Определяя на каждой точке величину
/4Й g
можно устранить ошибки из-за наклонов корпуса с чувствительной системой. Здесь dg - изменение компенсирующей силы. Определение угла /3 возможно непосредственным измерением угла наклона корпуса подходящими средствами. Угол /j может быть также определен измерением углов наклона рычага чувствительного элемента и его нити подвеса в исходном положении чувствительного элемента (два взаимно перпендикулярных направления при (5 0 перпендикулярны исходной оси корпуса с чувствительной системой, например, вертикали) при помощи двзтскоординатного электролитического уровня. Так как исходное положение чувствительного элемента всегда определяется относително корпуса с чувствительной системо предварительно установив нуль двухкоординатного уровня при совпадении оси корпуса с исходной осью, можно легко определить угол jb через углы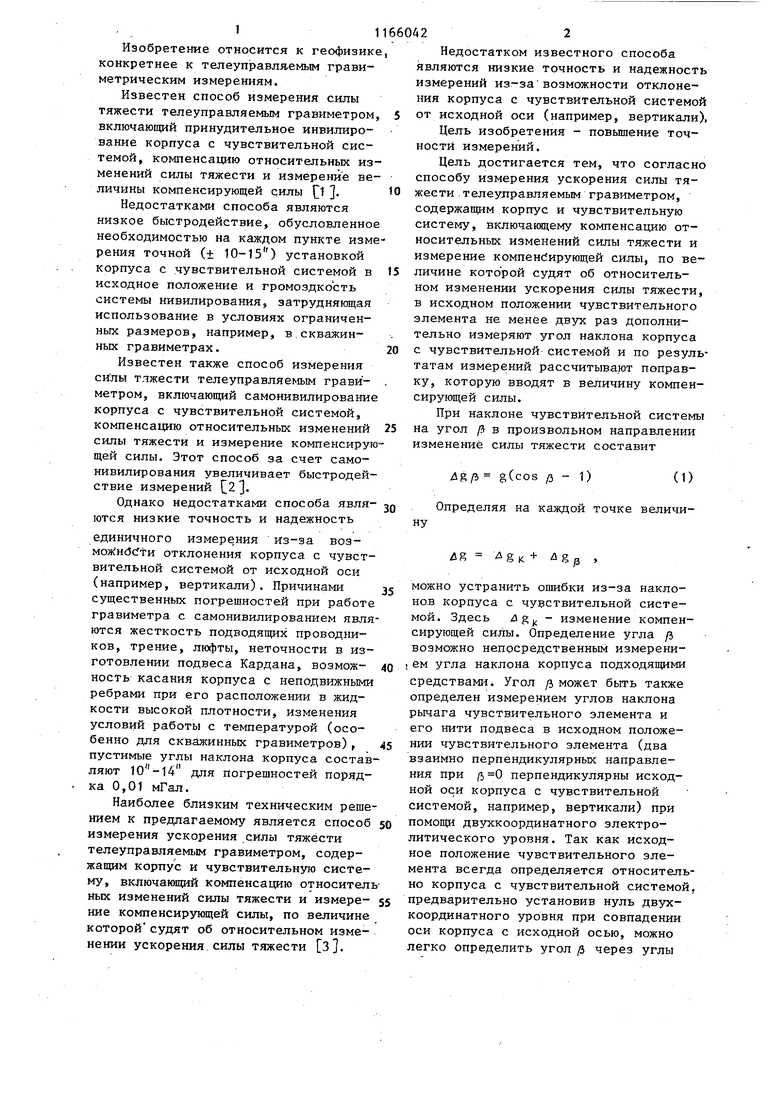
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| Электромеханический привод гравиметра в вертикаль | 1976 |
|
SU1144070A1 |
| ГРАВИМЕТР | 2008 |
|
RU2370794C1 |
| Стационарный гравиметр | 1976 |
|
SU661478A1 |
| Скважинный гравиметр | 1983 |
|
SU1163298A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ БИФИЛЯРНОГО ГРАВИМЕТРА | 1986 |
|
SU1484121A1 |
| Гиростабилизированный гравиметр | 1982 |
|
SU1123003A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВКИ ЗА ВЛИЯНИЕ ГОРИЗОНТАЛЬНЫХ УСКОРЕНИЙ И НАКЛОНОВ | 1968 |
|
SU219810A1 |
| Способ калибровки сканеров гравитационного поля | 2016 |
|
RU2663273C2 |
СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ ТЕЛЕУПРАВЛЯЕМЫМ ГРАВИМЕТРОМ, содержащим корпус и чувствительную систему, включающий компенсацию относительных, изменений силы тяжести и измерение компенсирующей силы, по величине которой судят об .относительном изменении ускорения силы тяжести, отличающийс я тем, что, с целью повьшения точности измерений, в исходном положении чувствительного элемента не менее двух раз дополнительно измеряют угол наклона корпуса с чувствительной системой и по результатам измерений рассчитывают поправку, которую вводят в величину компенсирующей силы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юзефович А.П.,Огородова Л;В | |||
| Гравиметрия | |||
| М., Недра, 1980 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СКВАЖИННЬШ ГРАВИМЕТР | 0 |
|
SU197205A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
