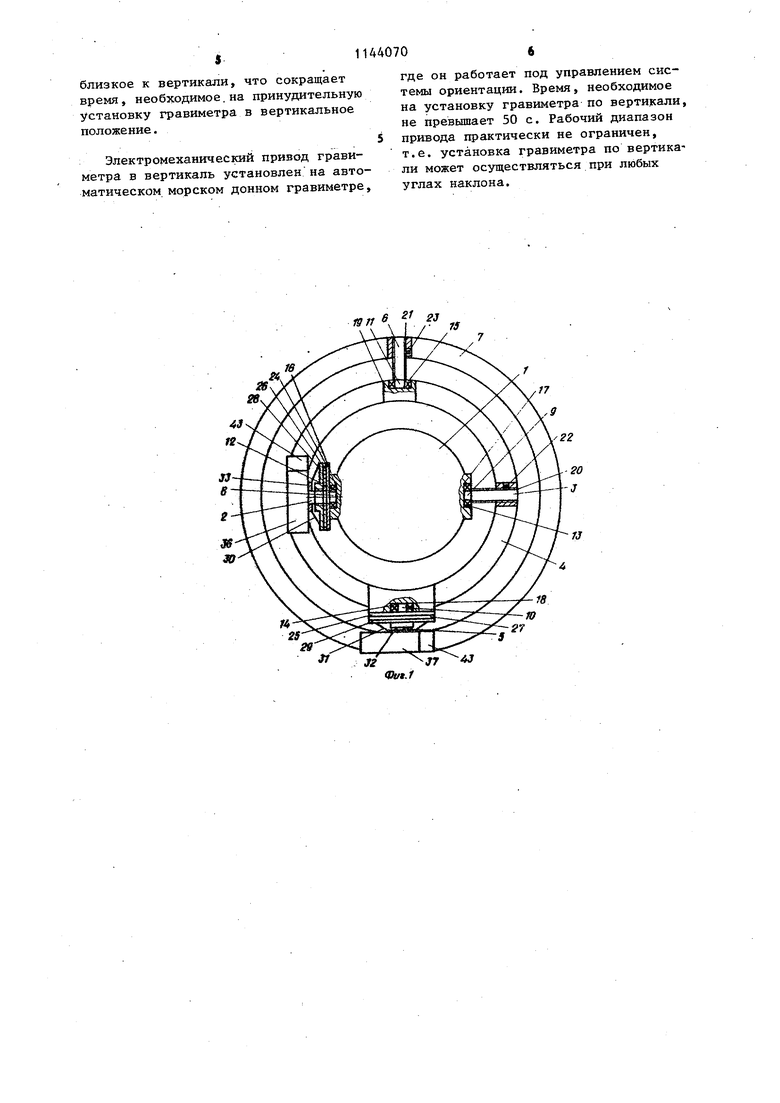
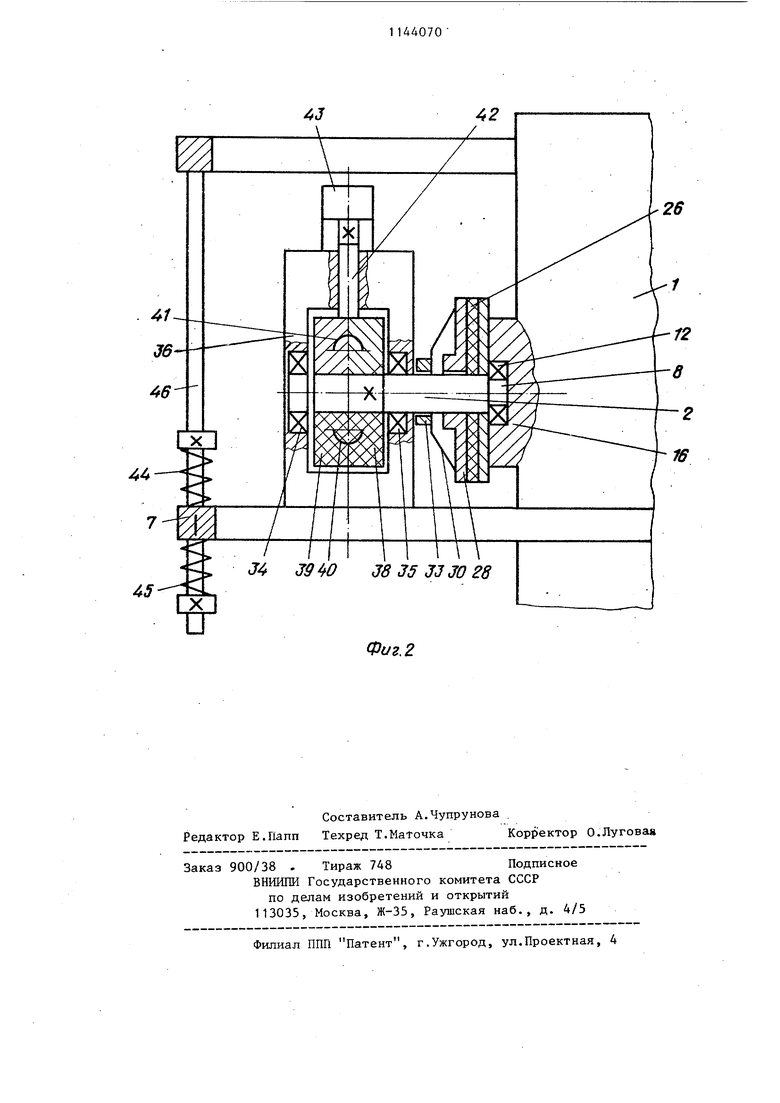
1 Изобретение относится к конструи рованию гравиметрической аппаратуры а более конкретно - к автоматизации процесса ориентации гравиметра по вертикали или телеуправлению этим процессом. Известен донный гравиметр, установка которого по вертикали произво дится в подвесе Кардано без принуди тельного привода и телеметрического контроля. Для обеспечения неуправляе мой автономной установки гравиметра на каждом пункте в вертикальное поло жение предварительно производят в лабораторных условиях юстировку гравиметра в подвесе Кардано по уровням с последующей тщательной проверкой его независимой установки при различ ных положениях скафандра lj . Основным недостатком такого приво да гравиметра в вертикаль является неконтролируемая и занимающая много времени на раскачивание в подвесе (6-8 мин) с постепенным затуханием самоориентация прибора по вертикали Как правило, после протаскивания ска фандра по дну, сильных толчков при спуске и подъеме, или после шторма установка гравиметра по уровням нару шается и требуется заход в порт и HO вые регулировочные работы. Известно арретирующее устройство, применяемое в телеуправляемом гравиметре, устанавливаемом в подвесе Кар дано с целью повышения производитель ности гравиметрической съемки. Элект ромеханический фрикционный арретир представляет собой механизм, состоящий из сферической чашки с мягким тормозящим слоем на дне, цилиндричес кого редуктора с электродвигателем, схемы управления и источника питания 2 . Недостатком такого привода, совме щающего в себе подвес Кардано и электромеханический арретир, является то, что он не гарантирует точную установку гравиметра, а происходит то же самоустанавливание прибора по вертикали, но со значительно меньшим периодом колебаний. Известен донный гравиметр с телевизионной системой наблюдения, в котором применены система принудительного привода гравиметра в вертикаль (горизонтирование чувствительного элемента) вместо самоустанавливающегося подвеса Кардано (гравиметр жест 70 ко связан с массивным донным снарядом) , и телевизионная система зместо используемых в донных гравиметрах телеметрических систем индикации нулевого положения маятника чувствительной системы, а также применено термостатирование чувствительного элемента (пружинных весов) гравиметра. Установка прибора в вертикаль (горизонтирование) производится с помощью электродвигателей, жестко связанных через цилиндрический и червячный редукторы с соответствующим кольцом подвеса Кардано, при этом угол возможной установки ограничен 12-15 з. Основным недостатком принудительного привода в вертикаль является 1жесткая связь привода с корпусом прибора через подвес Кардана. В этом случае каждый раз при толчках во время ли посадки на дно или на палубу, при раскачивании контейнера на спуске и подъеме и, тем более, при возможных протаскиваниях контейнера по дну на оси привода, жестко связанные с кольцами подвеса Кардано, а через них и на весь привод, действует момент силы, пропорциональный массе, сосредоточенной в центре тяжести прибора, расстоянию от оси до центра тяжести и действующему ускорению. Эти нагрузки должны приводить к большим люфтам в приводе и быстрому его износу.Поскольку же люфты в этом случае неизбежны, точная установка гравиметра в вертикаль невозможна. Вторым существенным недостатком привода является весьма ограниченный рабочий угол (12-15 ), позволяющий вести наблюдения только на сравнительно ровном морском дне, которое является редким исключением. Чаще всего приходится неоднократно устанавливать контейнер на дне с выбором соответствующего угла наклона. Последнее снижает производительность работ. . Цель изобретения - повышение точности, производительности и расширение рабочего диапазона принудительного привода гравиметра в вертикаль. Указанная цель достигается тем, что в электромеханическом приводе гравиметра в вертикаль, состоящем из двух идентичных приводов, установленных взаимно перпендикулярно соответственно на внутреннем и внешнем кольцах подвеса Кардано, каждый из которых содержит электродвигатель, цилиндрический и червячный редуктор, имеющий кинематическую связь с соответствукицей осью подвеса, в каждом приводе, дополнительно установлено разрезное червячное колесо, обе поло вины которого оттягиваются пружинами создающими момент пары сил относител но оси привода, при этом одна полови на червячного колеса насажена жестко, а другая свободно на ось, цапфа которой установлена в подшипнике, размещенном в гнезде корпуса гравиметра, а во втором приводе - в гнезде внутреннего кольца подвеса причем на верхней поверхности гнезда жестко, соосно с цапфой и свободно по отношению к ней, установлен фланец, к внутренней поверхности которого че рез свободно сидящий на оси привода фрикционный фланец, например, из фер родо, прижат с усилием, регулируемым с помощью тарельчатой пружины и гайки, сидящих на оси, второй фланец, которому обеспечена возможность пере .мещения вдоль оси на шлицах. С целью амортизации внешнее кольцо подвеса, на котором установлен привод, подвешено на пружинах, закрепленных в стойках. На фиг. 1 и 2 изображен электромеханический привод гравиметра в вер тикаль, две проекции, разрез. Гравиметр 1 подвешен на осях 2 и привода, установленного на внутреннем кольце 4 подвеса, которое подвё Щено на осях 5 и 6 привода, установленного на внешнем кольце 7. Цапфы 8-11 осей приводов установлены в подшипниках 12 - 15, размещенных в гнездах 16 и 17 корпуса гравиметра и в гнездах 18 и 19 внутреннего кол ца подвеса. Концы осей 3 и 6 вверну ты в резьбовые отверстия 20 и 21 на внутреннем и внешнем кольцах подвес и закреплены стопорами 22 и 23. На внешней поверхности гнезда 16 и гне да 18 соосно закреплены фланцы 24 и 25. На осях 2 и 5 свободно посаже ны фрикционные фланцы 26 и 27, изго товленные из ферродо, а на шлицах осей 2 и 5 посажены фланцы 28 и 29, прижимаемые тарельчатыми пружинами 30 и 31 с помощью регулировочных гаек 32 и 33 через фрикционные флан цы 26 и 27 к фланцам 24 и 25. На осях 2 и 5 приводов, установленных в подшипниках 34 и 35 червячных ре04 дукторов 36 и 37, находятся разрезные червячные колеса. Половины 38 и 39 червячного колеса оттягиваются пружинами 40 и 41, создающими момент пары сил относительно оси привода и удерживающимися в натянутом состоянии червяком 42. При этом половина 38 червячного колеса насажена на оси жестко, а половина 39 - свободно. Наружный конец червяка через цилиндрический редуктор (не показан) жестко связан с электродвигателем 43. Устройство червячного редуктора 37 аналогично. Внешнее кольцо 7 подвеса с целью амортизации толчков-подвешено на пружинах 44 и 45, закрепленных в стойках 46. Электромеханический привод гравиметра в вертикаль работает следующим образом. При посадке, контейнера с гравиметрами на дно, в общем случае под углом к горизонту, толчок о грунт самортизуется пружинами 44 .и 45. В момент толчка под действием собственного веса в результате проворачивания фланцев 24 и 25 относительно фрикционных фланцев 26 и 27 и частичного проворачивания -последних относительно фланцев 28 и 29, зажим которых соответственно отрегулирован с помощью тарельчатых пружин 30 и 31 ,гайками 32 и 33, гравиметр 1 устанавливается в положение, близкое к вертикали. После включения электродвигателя 43 вращение через цилиндрический ре- . дуктор передается на червяк 42, а с него на ось 2 привода без люфта, так к:к наличие последнего исключается действием стягивающих пружин 40 и 41 на обе половины 38 и 39 червячного колеса. Таким образом, вращение с червячного редуктора 36 передается с оси 2 на сидящий на шлицах фланец 28 и с него через фрикционньй фланец 26 на фланец 24, жестко закрепленный на внешней поверхности гнезда 16 гравиметра. В результате этого 1равиметр устанавливается в вертикаль, при этом исключается опасность поломки привода при толчках и ударах за счет проворачивания фланцев относительно один другого. Кроме того, зажатие фрикционного фланца может быть так отрегулировано, что гравиметр во всех случаях стремится занять положение.
близкое к вертикали, что сокращает время, необходимое.на принудительную установку гравиметра в вертикальное положение.
Электромеханический привод гравиметра в вертикаль установлен на автоматическом морском донном гравиметре,
где он работает под управлением системы ориентации. Время, необходимое на установку гравиметра по вертикали, не превьошает 50 с. Рабочий диапазон привода практически не ограничен, т.е. установка гравиметра по вертикали может осуществляться при любых углах наклона.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО АРРЕТИРОВАНИЯ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2564636C1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| Донная магнитовариационная станция | 1982 |
|
SU1056112A1 |
| Донный гравиметр | 1977 |
|
SU626425A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Автоматический прибор для съемки плана и профиля пройденного пути | 1933 |
|
SU42702A1 |
| АСТАТИЧЕСКИЙ ПОПЛАВКОВЫЙ ГИРОКОМПАС | 1969 |
|
SU252636A1 |
| МЕХАНИЗМ ПОВОРОТА БАШНИ | 1993 |
|
RU2068536C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ГРАВИМЕТРА В ВЕРТИКАЛЬ, состоящий из двух идентичных приводов, установленных взаимно перпендикулярносоответственно на внутреннем и внешнем кольцах подвеса Кардано, каядый из которых содержит электродвигатель, цилиндрический и червячный редуктор, имеющий кинематическую связь с соответствующей осью подвеса, о т л и чающийся тем, что, с целью повышения точности установки гравиметра в вертикаль и увеличения производительности, в каждом приводе дополнительно установлено разрезное червячное колесо, обе половины которого оттягиваются пружинами, при этом одна половина червячного колеса насажена жестко, а другая свободно на ось, цапфы которой установлена (Л в подшипнике, размещенном в гнезде корпуса гравиметра, а во втором приводе - в гнезде внутреннего кольца подвеса, причем на верхней поверхности гнезда жестко установлен фланец, к внутренней поверхности которого через свободно сидящий на оси привода фрикционный фланец прикреплен 4: фланец на шлицах, прижатый тарельча4 той пружиной с гайкой.
2S
29
Л
в 23
7S
а
п
ю
SV
зг jr -w
Фи.1
8 35 33 JO 28
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и Сагитов М.У | |||
| Гравиметрическая разведка | |||
| М., Недра, 1968, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и Демченко В.Ф | |||
| Пути повышения точности и производительности морской гравиметрической съемки с донными гравиметрами | |||
| -В сб | |||
| Прикладная геофизика, вып | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| -В сб.: Прикладная геофизика, вып | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Ветряный много клапанный двигатель | 1921 |
|
SU220A1 |
