Изобретение относится к геофизике, в частности к устройствам для измерения силы тяжести и способам его калибровки.
Известно устройство для измерения силы тяжести (патент РФ №2198414, МПК G01V 7/00, G01V 7/02, дата приоритета 03.04.2002 г., дата публикации 02.10.2002 г.), содержащее корпус, заполненный демпфирующей жидкостью, двойную кварцевую упругую систему крутильного типа с горизонтальными маятниками и укрепленными на них зеркалами и фотоэлектрический преобразователь, включающий в себя источник излучения, объектив, автоколлимационную марку, установленную в фокальной плоскости объектива, и фотоэлектрический приемник, который выполнен в виде двух приборов с зарядовой связью (ПЗС) линейного типа, развернутых друг относительно друга на 180°. Управляющие входы ПЗС подключены к единому формирователю управляющих сигналов, а выходные регистры через видеотракт подключены к аналого-цифровым преобразователям, соединенным с блоками вычислений, выходы которых через устройство интерфейса и оптронную развязку подключены к передатчику последовательного канала, при этом измерение силы тяжести, основанное на измерении угла поворота маятников, осуществляется в импульсном режиме по приходу синхроимпульса от внешнего источника. Недостатком известного устройства является достижение высокой точности только при незначительном изменении температуры окружающей среды в пределах ±0,5°C. Такие стабильные внешние условия трудно обеспечить при выполнении аэрогравиметрической съемки с самолетов, особенно в условиях Арктики, что является в настоящее время наиболее актуальной задачей.
Известен способ эталонирования гравиметров наклоном (Романюк В.А. и др. Эталонирование гравиметров с горизонтальной крутильной нитью методом наклона. М.: Наука, 1979, гл. 2, с. 12-64), заключающийся в том, что выполняются отсчеты гравиметра при изменении момента силы тяжести путем наклона прибора в гравитационном поле Земли и вычисляются коэффициенты градуировочной характеристики гравиметра из системы алгебраических уравнений. Недостатком указанного способа является то, что он требует очень тщательной юстировки устройства для эталонирования и гравиметра на нем. При эталонировании гравиметра с двойной упругой системой крутильного типа это принципиально недостижимо, так как оси вращения двух маятников практически никогда не бывают параллельными и, следовательно, их нельзя отъюстировать необходимым образом одновременно.
Наиболее близким по технической сущности и принятым за прототип является устройство измерения силы тяжести (патент РФ №2377611, МПК G01V 7/00, дата приоритета 22.04.2008 г., опубликовано 27.12.2009 г.), содержащее двойную кварцевую упругую систему крутильного типа с горизонтальными маятниками и укрепленными на них зеркалами, которая помещена в корпус, наполненный демпфирующей жидкостью и фотоэлектрический преобразователь, включающий в себя источник излучения, объектив, автоколлимационную марку, установленную в фокальной плоскости объектива, и фотоэлектрический приемник, размещенный в сопряженной фокальной плоскости объектива, при этом в качестве фотоэлектрического приемника применяется специализированная мегапиксельная ТВ-камера на КМОП-структуре, выход которой подключен к USB-порту персональной электронно-вычислительной машины (ПЭВМ), а вход подключен к блоку синхронизации, который соединен также с источником излучения. Фотоэлектрический преобразователь закреплен на корпусе упругой системы с возможностью его поворота вокруг оптической оси. Упругая система вместе с фотоэлектрическим преобразователем помещена в корпус термостата, на боковых стенках которого прикреплены полупроводниковые модули с радиаторами, при этом модули последовательно соединены в цепь, подключенную к выходу платы управления термостатом, вход которой соединен с образцовым терморезистором, встроенным в корпус термостата, в нижней части основания термостата установлен вентилятор, в самом основании размещены полости для прокачки воздуха через радиаторы с помощью вентилятора, а корпус термостата жестко закреплен на основании через теплоизолирующую плиту и закрыт теплоизолирующим материалом. Для удержания оси чувствительности гравиметра в направлении местной вертикали при измерениях ускорения силы тяжести на борту подвижных объектов изобретение устанавливается в двухосную гироплатформу. Недостатком указанного устройства для измерения силы тяжести является отсутствие возможности автоматического контроля положения оси чувствительности гравиметра в процессе эксплуатации. При этом отклонение оси чувствительности гравиметра от вертикального положения на подвижном объекте определяется погрешностями его гироплатформы, обусловленными как инструментальными погрешностями ее чувствительных элементов - акселерометров и гироскопов, так и динамическими возмущениями, возникающими при движении носителя, и может достигать 3-5 угловых минут. Погрешность измерения ускорения силы тяжести при этом может достигать десятков миллигал (1 мГал = 10-5 м/с2).
Наиболее близким к изобретению является способ определения коэффициентов градуировочной характеристики морского гравиметра с двойной упругой системой крутильного типа путем снятия отсчетов шкалы гравиметра при изменении момента силы тяжести, действующего на упругую систему (авторское свидетельство СССР №1092456, МПК G01V 7/06, дата приоритета 27.09.83, опубликовано 15.05.84). В гравиметр устанавливают два зеркала с заданным углом между ними, выполняют отсчет этого угла на шкале гравиметра и по нему вычисляют масштабный коэффициент квадратичного члена, а масштабный коэффициент линейного члена вычисляют по отсчетам гравиметра, полученным при изменении момента силы тяжести. Кроме того, изменение момента силы тяжести осуществляют наклоном прибора, а масштабный коэффициент линейного члена для каждого из маятников вычисляют из системы алгебраических уравнений. Недостатком указанного способа калибровки гравиметра является то, что необходимо выполнять перемещения прибора по пунктам с известными значениями силы тяжести, что увеличивает продолжительность процесса калибровки.
Задачей, на решение которой направлено изобретение, является повышение точности гиростабилизированного кварцевого гравиметра и сокращение продолжительности процесса его калибровки.
Сущность изобретения заключается в том, что гиростабилизированный гравиметр содержит гравиметрический датчик в виде двойной кварцевой упругой системы крутильного типа с горизонтальными маятниками, погруженной в демпфирующую жидкость, и фотоэлектрический преобразователь. На корпусе гравиметрического датчика установлены два электронных уровня, один из которых ориентирован вдоль оси маятников, другой - вдоль оси вращения маятников, при этом выходы электронных уровней подключены к блоку регистрации показаний электронных уровней, включенному в состав ПЭВМ. Гравиметрический датчик помещен в двухосную гироплатформу с установленными на ее осях датчиками угла и моментными двигателями, которые соединены с выходами усилителей следящих систем стабилизации. На гироплатформе установлены также два гироскопа и два акселерометра. Датчики угла прецессии гироскопов через АЦП соединены с переключателями режимов работы, которые соединены с входами усилителей следящих систем стабилизации. Акселерометры через цепь коррекции гироплатформы соединены с датчиками моментов гироскопов. В цепь коррекции включен блок смещения нуля акселерометров, установленный в ПЭВМ. Ось чувствительности гравиметрического датчика перпендикулярна плоскости платформы, ось маятников упругой системы совпадает с осью бортовой качки платформы, а выход фотоэлектрического преобразователя соединен с блоком регистрации данных гравиметра, установленным в ПЭВМ. В режиме гиростабилизации датчики угла прецессии гироскопов соединены с усилителями следящих систем стабилизации и электронные уровни показывают положение оси чувствительности гравиметра. В режиме калибровки гравиметра датчики угла прецессии гироскопов отсоединяются от усилителей следящих систем стабилизации и на входы усилителей через АЦП и сумматоры подключаются датчики угла, установленные на осях гироплатформы. Вторые входы сумматоров подключены к блоку задания углов наклона гироплатформы, введенному в состав ПЭВМ.
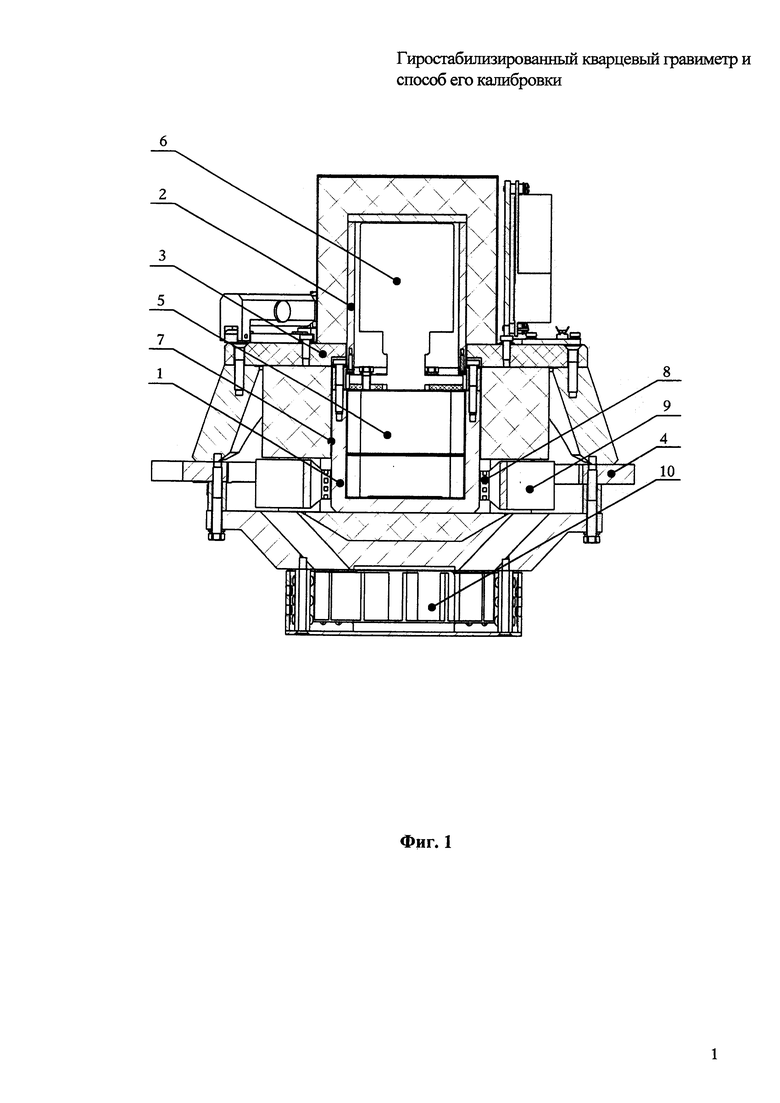
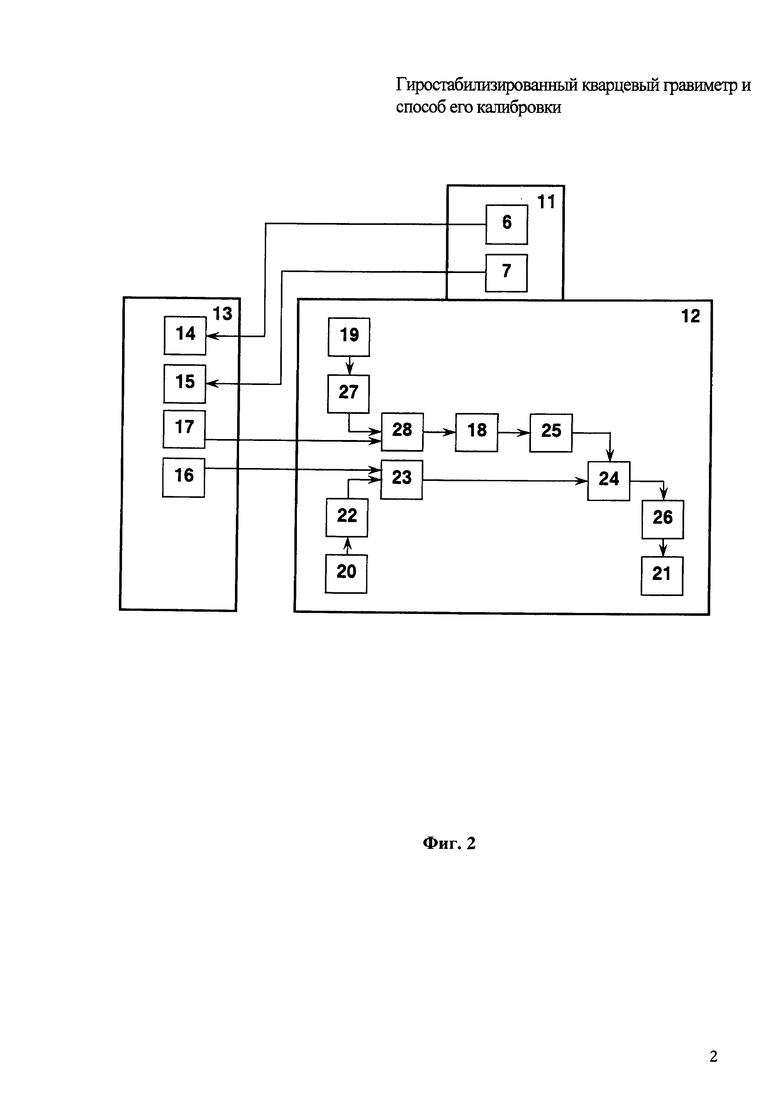
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен общий вид гравиметрического датчика в плоскости основного сечения, на фиг. 2 - структурная схема гиростабилизированного гравиметра (показана одна ось стабилизации).
Гравиметрический датчик (фиг. 1) содержит термостат, состоящий из нижнего корпуса 1 и верхнего корпуса 2, установленного через теплоизолирующее капролоновое кольцо 3 на основании 4, посредством которого гравиметрический датчик крепится в гироплатформе. В нижнем корпусе 1 установлена двойная кварцевая упругая система крутильного типа с горизонтальными маятниками, погруженными в демпфирующую жидкость 5. В верхнем корпусе 2 размещен фотоэлектрический преобразователь 6. На боковых стенках корпуса 1 установлены два электронных уровня 7, предназначенные для контроля положения оси чувствительности упругой системы в процессе эксплуатации гравиметра. На каждой из боковых стенок корпуса 1 установлено по два полупроводниковых модуля 8, работающих на эффекте Пельтье. Для отвода тепла с горячих спаев модулей служат радиаторы 9, через которые прокачивается воздух с помощью вентилятора 10, установленного в нижней части основания 4 гравиметрического датчика.
Гиростабилизированный гравиметр (фиг. 2) содержит гравиметрический датчик 11, установленный на двухосную гироплатформу 12, и ПЭВМ 13. ПЭВМ 13 содержит блок регистрации данных гравиметра 14, блок регистрации показаний электронных уровней 15, блок задания углов наклона 16 и блок задания смещения нуля акселерометра 17. На гироплатформе 12 помимо гравиметрического датчика 11 размещены два гироскопа 18 и два акселерометра 19. Ось чувствительности гравиметрического датчика 11 перпендикулярна плоскости гироплатформы 12, а ось маятников упругой системы совпадает с осью бортовой качки гироплатформы 12. Фотоэлектрический преобразователь 6 гравиметрического датчика 11 подключен к блоку регистрации данных гравиметра 14. Электронные уровни 7 подключены к блоку регистрации показаний электронных уровней 15. На каждой из осей гироплатформы 12 установлены датчики угла 20 и моментные двигатели 21. Датчик угла 20 через аналого-цифровой преобразователь 22 и сумматор 23 соединен с одним из входных контактов переключателя режимов работы 24. Другой вход сумматора 23 подключен к блоку задания углов наклона 16. Ко второму контакту переключателя режимов работы 24 через аналого-цифровой преобразователь 25 подключен датчик угла прецессии гироскопа 18. Выходной контакт переключателя режимов работы 24 соединен с усилителем 26 следящей системы стабилизации, который соединен с моментным двигателем 21. Акселерометр 19 через блок коррекции гировертикали 27 и второй сумматор 28 соединен с датчиком момента гироскопа 18. Другой вход сумматора 28 подключен к блоку задания смещения нуля акселерометра 17. В режиме гиростабилизации сигнал с датчика угла прецессии гироскопа 18 через переключатель 24 подается на усилитель 26 следящей системы, управляющей моментным двигателем 21. Сигнал с датчика угла акселерометра 19 через блок коррекции гировертикали 27 поступает на датчик момента гироскопа 18, в результате чего гироплатформа 12 устанавливается в горизонтальное положение с некоторой погрешностью, что приводит к отклонению оси чувствительности гравиметрического датчика 11 от вертикали. Величина отклонения зависит от положения нуля акселерометра 19 и определяется по показаниям электронных уровней 7. Для компенсации этого отклонения с блока задания смещения нуля акселерометра 17 при необходимости вводят поправку на смещение нуля акселерометра так, чтобы показания электронных уровней были в заданных пределах. Затем посредством переключателя 24 гироплатформу 12 переводят в режим электрического арретирования, при котором на усилитель 26 следящей системы подается сигнал от датчика угла 20 и гироплатформа 12 принимает положение, определяемое величиной этого сигнала. В исходном состоянии сигнал с датчика угла 20 соответствует горизонтальному положению гироплатформы 12. При этом фиксируется начальное показание m0, пикс, гравиметра. Затем с блока задания углов наклона 16 через сумматор 23 последовательно вводят ряд поправок в усилитель следящей системы 26 по оси бортовой качки для наклона платформы на углы θ, равные 1°50'00ʺ; 2°30'00ʺ; 3°10'00ʺ; 3°40'00ʺ; 4°10'00ʺ; 4°30'00ʺ; 4°50'00ʺ; 5°10'00ʺ, 0°00'00ʺ, минус 1°50'00ʺ; минус 2°30'00ʺ; минус 3°10'00ʺ; минус 3°40'00ʺ; минус 4°10'00ʺ; минус 4°30'00ʺ; минус 4°50'00ʺ; минус 5°10'00ʺ, соответствующие изменению ускорения силы тяжести до 4 Гал с шагом 500 мГал, фиксируя каждый раз по завершении переходного процесса гравиметрического фильтра, обусловленного вводом поправок, показания m, пикс, гравиметра, после чего вычисляют коэффициенты градуировочной характеристики гравиметра из системы уравнений вида:
b(m-m0)+a(m-m0)2=g(cosθ-1),
b - масштабный коэффициент гравиметра, мГал/пикс,
a - коэффициент при квадратичном члене градуировочной характеристики, мГал/пикс2,
g - значение силы тяжести в месте калибровки, мГал.
Проверка предложенного устройства и способа калибровки гравиметра была выполнена экспериментально. Было подтверждено, что предельная погрешность определения положения оси чувствительности гравиметра по показаниям электронных уровней не превышает 30 угловых секунд, что соответствует погрешности измерения гравиметра 0,04 мГал. Способ калибровки был проверен на 11-и образцах гравиметров. Относительная погрешность определения коэффициентов градуировочной характеристики гравиметров не превысила 0,05%, что соответствует предъявляемым требованиям. Продолжительность процесса калибровки одного гравиметра составила 8 ч, при использовании других способов продолжительность процесса калибровки составляла не менее 3 суток.
Таким образом, заявляемое изобретение дает возможность повысить точность гиростабилизированного кварцевого гравиметра и позволяет сократить продолжительность калибровки гиростабилизированного кварцевого гравиметра за счет выполнения ее полевых условиях, что исключает необходимость демонтажа гравиметра с судна и доставки его в специализированную лабораторию.
Работа выполнена при поддержке гранта Российского научного фонда (проект No14-29-00160).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2008 |
|
RU2377611C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056643C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ СУХОПУТНЫХ НОСИТЕЛЕЙ В РЕЖИМЕ КРАТКОВРЕМЕННЫХ ОСТАНОВОК | 1993 |
|
RU2056641C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056642C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2002 |
|
RU2198414C1 |
| КВАРЦЕВЫЙ ГРАВИМЕТР | 2000 |
|
RU2171481C1 |
| Амортизированный гравиметр | 2022 |
|
RU2792153C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) | 2018 |
|
RU2697474C1 |
| СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА | 1993 |
|
RU2047093C1 |
Изобретение относится к измерительной технике и может найти применение в устройствах измерения силы тяжести и способам их калибровки. Технический результат – повышение точности. Для этого гравиметр содержит гравиметрический датчик в виде двойной кварцевой упругой системы крутильного типа с горизонтальными маятниками, погруженной в демпфирующую жидкость, и фотоэлектрического преобразователя, расположенный на двухосной гироплатформе, на осях которой установлены датчики угла и моментные двигатели, при этом входы моментных двигателей соединены с выходами усилителей следящих систем стабилизации, при этом на гироплатформе установлены два гироскопа и два акселерометра, В его состав введены аналого-цифровые преобразователи, сумматоры, переключатель режима работы, блок задания углов наклона гироплатформы и блок задания смещения нуля акселерометров. На корпусе гравиметрического датчика могут быть установлены два электронных уровня, один из которых ориентирован вдоль оси маятников, другой - вдоль оси вращения маятников. Калибровка гравиметра основана на измерении показаний гравиметра при изменении угла наклона гравиметра. При этом гироплатформу переключают в режим электрического арретирования, при котором положение гироплатформы относительно горизонта задается по сигналам с датчиков угла, установленных на осях гироплатформы, в усилитель следящей системы по оси бортовой качки вводят поправки для наклона гироплатформы на углы, соответствующие изменению ускорения силы тяжести до 4 Гал с шагом 500 мГал, фиксируя каждый раз показания гравиметра, после чего вычисляют коэффициенты градуировочной характеристики гравиметра из системы уравнений вида: b(m-m0)+a(m-m0)2=g(cosθ-1), где b - масштабный коэффициент гравиметра, мГал/пикс, а - коэффициент при квадратичном члене градуировочной характеристики, мГал/пикс2, g - значение силы тяжести в месте калибровки, мГал. 2 н. и 1 з.п. ф-лы, 2 ил.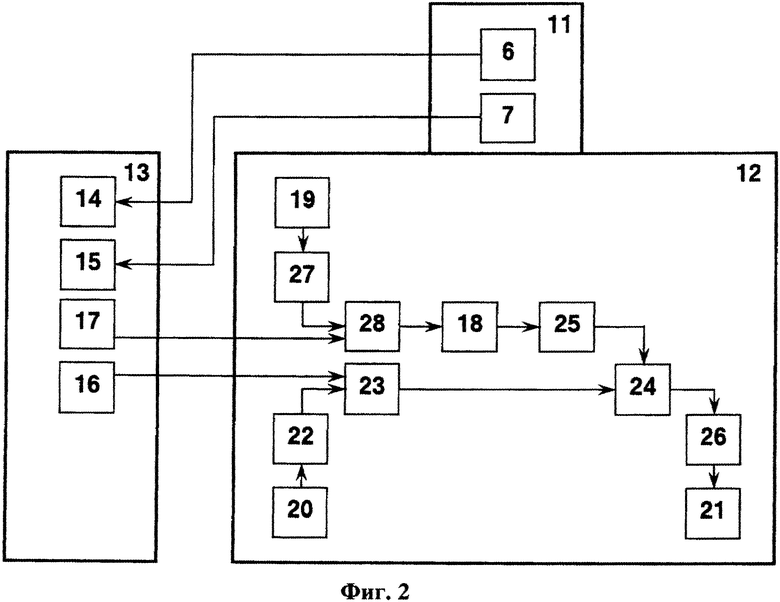
1. Гиростабилизированный кварцевый гравиметр, содержащий гравиметрический датчик в виде двойной кварцевой упругой системы крутильного типа с горизонтальными маятниками, погруженной в демпфирующую жидкость, и фотоэлектрический преобразователь, который расположен на двухосной гироплатформе, на осях которой установлены датчики угла и моментные двигатели, при этом входы моментных двигателей соединены с выходами усилителей следящих систем стабилизации, при этом на гироплатформе установлены также два гироскопа и два акселерометра, при этом ось чувствительности гравиметрического датчика перпендикулярна плоскости гироплатформы, а ось маятников упругой системы совпадает с осью бортовой качки гироплатформы, и выход фотоэлектрического преобразователя соединен с ПЭВМ через блок регистрации данных гравиметра, отличающийся тем, что введены аналого-цифровые преобразователи, два сумматора, переключатель режима работы, блок задания углов наклона гироплатформы и блок задания смещения нуля акселерометров, при этом каждый датчик угла через аналого-цифровой преобразователь и сумматор соединен с переключателем режимов работы, выходы которого соединены с входами усилителей следящих систем стабилизации, при этом вторые входы сумматоров соединены - один с блоком задания углов наклона гироплатформы, а другой с блоком задания смещения нуля акселерометров.
2. Гиростабилизированный кварцевый гравиметр по п. 1, отличающийся тем, что на корпусе гравиметрического датчика установлены два электронных уровня, один из которых ориентирован вдоль оси маятников, другой - вдоль оси вращения маятников, при этом выходы электронных уровней подключены к блоку регистрации показаний электронных уровней.
3. Способ калибровки гиростабилизированного кварцевого гравиметра, установленного в двухосной гироплатформе, основанный на измерении показаний гравиметра при изменении угла наклона гравиметра, отличающийся тем, что гироплатформу включают в режим гиростабилизации и по показаниям электронных уровней определяют положение оси чувствительности гравиметра, вводят смещение нуля акселерометров так, чтобы показания электронных уровней были в пределах ±30'', затем переключают гироплатформу в режим электрического арретирования, при котором положение гироплатформы относительно горизонта задается по сигналам с датчиков угла, установленных на осях гироплатформы, через ПЭВМ последовательно вводят поправки со значениями 1°50'00''; 2°30'00''; 3°10'00''; 3°40'00''; 4°10'00''; 4°30'00''; 4°50'00''; 5°10'00'', 0°00'00'', минус 1°50'00''; минус 2°30'00''; минус 3°10'00''; минус 3°40'00''; минус 4°10'00''; минус 4°30'00''; минус 4°50'00''; минус 5°10'00'' в усилитель следящей системы по оси бортовой качки для наклона гироплатформы на углы, соответствующие изменению ускорения силы тяжести до 4 Гал с шагом 500 мГал, фиксируя каждый раз по завершении переходного процесса гравиметра, обусловленного вводом поправок, показания гравиметра, после чего вычисляют коэффициенты: градуировочной характеристики гравиметра из системы уравнений вида:
b(m-m0)+а(m-m0)2=g (cosθ-1),
b - масштабный коэффициент гравиметра, мГал/пикс,
а - коэффициент при квадратичном члене градуировочной характеристики, мГал/пикс2,
g - значение силы тяжести в месте калибровки, мГал.
| УСТРОЙСТВО ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2008 |
|
RU2377611C1 |
| Романюк В.А | |||
| и др | |||
| Эталонирование гравиметров с горизонтальной крутильной нитью методом наклона | |||
| М | |||
| "Наука", 1979, гл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЦИФРОВОЙ ГРАВИМЕТР | 1994 |
|
RU2095829C1 |
| ВРАЩАЮЩЕЕСЯ НЕ ЗАВИСЯЩЕЕ ОТ ОРИЕНТАЦИИ ГРАВИМЕТРИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ КОРРЕКЦИИ СИСТЕМАТИЧЕСКИХ ОШИБОК | 2009 |
|
RU2515194C2 |
| Способ поверки многокомандных приборов активного контроля | 1990 |
|
SU1793190A1 |
| Способ получения кетобутанола | 1950 |
|
SU88061A1 |

