Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для внесения удобрений.
Цель изобретения - повышение поперечной динамической устойчивости разбрасывателя при разворотах и работе на склонах.
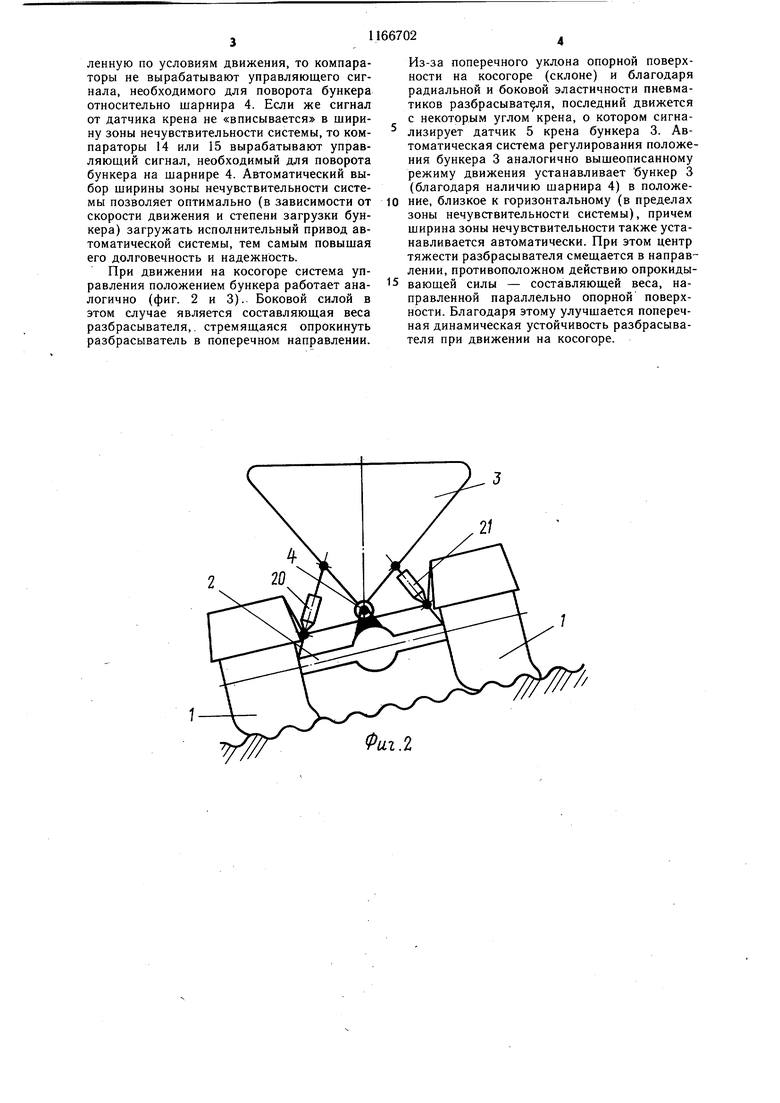
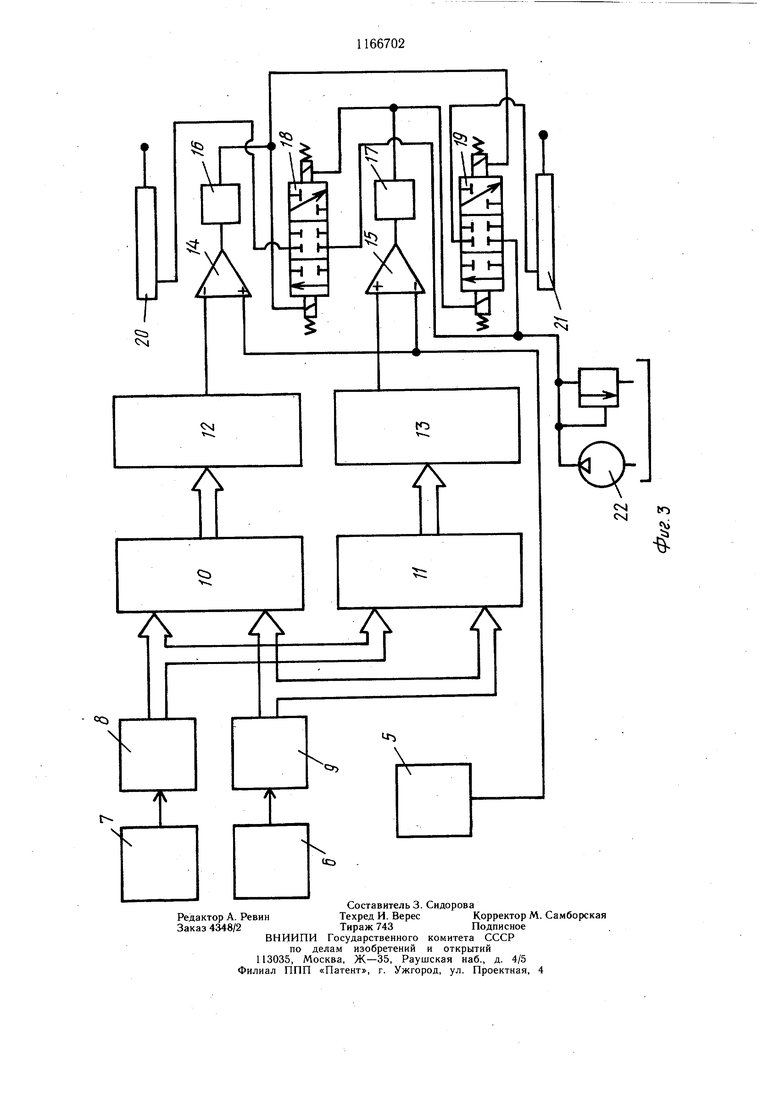
На фиг. 1 изображен самоходный разбрасыватель при движении на повороте; на фиг. 2 - то же, при движении на склоне; на фиг. 3 - блок-схема автоматической системы регулирования положения бункера.
Самоходный разбрасыватель содер кит шасси 1, остов 2, бункер 3, нижняя часть которого связана с остовом 1 посредством горизонтально-продольного шарнира 4, ось вращения которого лежит в продольной плоскости симметрии разбрасывателя, и разбрасывающий рабочий орган (не показан).
Автоматическая система регулирования положения бункера разбрасывателя включает в свой состав датчик 5 крена бункера, датчик 6 скорости движения разбрасывателя, датчик 7 загрузки бункера, аналогоцифровые преобразователи 8 и 9.
В состав системы разбрасывателя входят также запоминающие устройства 10 и 11. Постоянное запоминающее устройство (ПЗУ) Ю предназначено для задания цифрового кода верхнего порога зоны нечувствительности и реализует функцию двух переменных (загрузка бункера и скорость движения разбрасывателя). Постоянное запоминающее устройство 11 предназначено для задания цифрового кода нижнего порога зоны нечувствительности и также реализует функцию двух переменных (загрузка бункера и скорость движения). Выходы постоянных запоминающих устройств связаны со входами цифроаналоговых преобразователей 12 и 13, которые преобразуют сигналы, поступающие от ПЗУ Ю и 11, из цифровой в аналоговую форму, причем выход цифроаналогового преобразователя (ЦАП) 12 связан с инвертирующим входом компаратора 14, а выход ЦАП 13 связан с неинвертирующим входом компаратора 15. Аналоговый сигнал от датчика 5 крена непосредственно поступает в инвертирующий вход компаратора 15 и неинвертирующий вход компаратора 14. Компараторы 14 или 15 электрически связаны через усилители 16 или 17 мощности с исполнительным механизмом, содержащим электромагнитные клапаны 18 и 19 привода, включающего гидроцилиндры 20 и 21 и насос 22, повышающими надежность и долговечность исполнительного привода путем автоматического выбора ширины зоны нечувствительности системы. В состав разбрасывателя входят также шины 21.
Самоходный разбрасыватель работает следующим образом.
Рассмотрим движение разбрасывателя по горизонтальной поверхности поля во время поворота влево. При этом возникает центробежная сила инерции, действующая на разбрасыватель от центра поворота и.
стремящаяся опрокинуть разбрасыватель относительно опор борта, наружного по отношению к центру поворота (фиг. 1). Благодаря радиальной эластичности и отчасти - боковой эластичности пневматиков ходовой части шасси происходит поперечный крен разбрасывателя, а вместе с ним и бункера 3 с которым связан датчик 5 крена, сигнализирующий об отклонении положения бункера 3 от горизонтального положения и
0 вырабатывающий сигнал, поступающий в инвертирующий вход компаратора 15 и неинвертирующий вход компаратора 14. Компаратор 14 вырабатывает управляющий сигнал, поступающий через усилитель 16 на электромагниты электромагнитных клапанов 18 и 19, причем рабочая жидкость поступает в рабочую полость одного из гидроцилиндров 20 или 21, а из рабочей полости другого гидроцилиндра поступает на слив (в случае поворота бункера влево
0 по ходу движения, как в рассматриваемом случае). При повороте разбрасывателя направо компаратор 15 вырабатывает управляющий сигнал, поступающий через усилитель 17 на противоположные электромагниты электромагнитных клапанов 18 и 19.
5 При этом роли гидроцилиндров меняются, и тот из них, который своей рабочей полостью был соединен со сливной магистралью, соединяется теперь с напорной магистралью, а рабочая полость второго гидроцилиндра соединяется со сливом. При этом
бункер 3 поворачивается в направлении центра поворота на величину, достаточную для того, чтобы бункер 3 снова занял положение, близкое к горизонтальному, т. е. такое положение, при котором сигнал от датчика крена попал бы в зону нечувствительности системы. Поворот бункера в направлении центра поворота позволяет сместить центр тяжести разбрасывателя в направлении, противоположном действию центробежной силы инерции, стремящейся опрокинуть разбрасыватель в поперечном направлении, и тем самым способствует повышению поперечной динамической устойчивости разбрасывателя сыпучих сельскохозяйственных химикатов. При этом ширина зоны нечувствительности системы выбирается автоматически в зависимости от двух переменных параметров: сигнала от датчика 7 загрузки бункера 3 и сигнала от датчика 6 скорости разбрасывателя, в соответствии с алгоритмом, заложенным в память постоянных запоминающих устройств 10 и 11, причем ПЗУ 10 задает цифровой код верхнего порога зоны нечувствительности, а ПЗУ 11 задает цифровой код нижнего порога зоны нечувствительности. В соответствии с заданной ПЗУ 10 и 11 шириной зоны нечув
5 ствительности, компараторы 14 и 15 реагируют на непрерывно поступающий на их входы сигнал от датчика крена 5 бункера 3. Если, например, сигнал от датчика крена попадает в зону нечувствительности, установленную по условиям движения, то компараторы не вырабатывают управляющего сигнала, необходимого для поворота бункера относительно шарнира 4. Если же сигнал от датчика крена не «вписывается в ширину зоны нечувствительности системы, то компараторы 14 или 15 вырабатывают управляющий сигнал, необходимый для поворота бункера на шарнире 4. Автоматический выбор ширины зоны нечувствительности системы позволяет оптимально (в зависимости от скорости движения и степени загрузки бункера) загружать исполнительный привод автоматической системы, тем самым повышая его долговечность и надежность.
При движении на косогоре система управления положением бункера работает аналогично (фиг. 2 и 3). Боковой силой в этом случае является составляющая веса разбрасывателя,. стремящаяся опрокинуть разбрасыватель в поперечном направлении.
Из-за поперечного уклона опорной поверхности на косогоре (склоне) и благодаря радиальной и боковой эластичности пневматиков разбрасыват я, последний движется с некоторым углом крена, о котором сигнализирует датчик 5 крена бункера 3. Автоматическая система регулирования положения бункера 3 аналогично вышеописанному режиму движения устанавливает бункер 3 (благодаря наличию шарнира 4) в положение, близкое к горизонтальному (в пределах зоны нечувствительности системы), причем ширина зоны нечувствительности также устанавливается автоматически. При этом центр тяжести разбрасывателя смещается в направлении, противоположном действию опрокидывающей силы - составляющей веса, направленной параллельно опорной поверхности. Благодаря этому улучшается поперечная динамическая устойчивость разбрасывателя при движении на косогоре.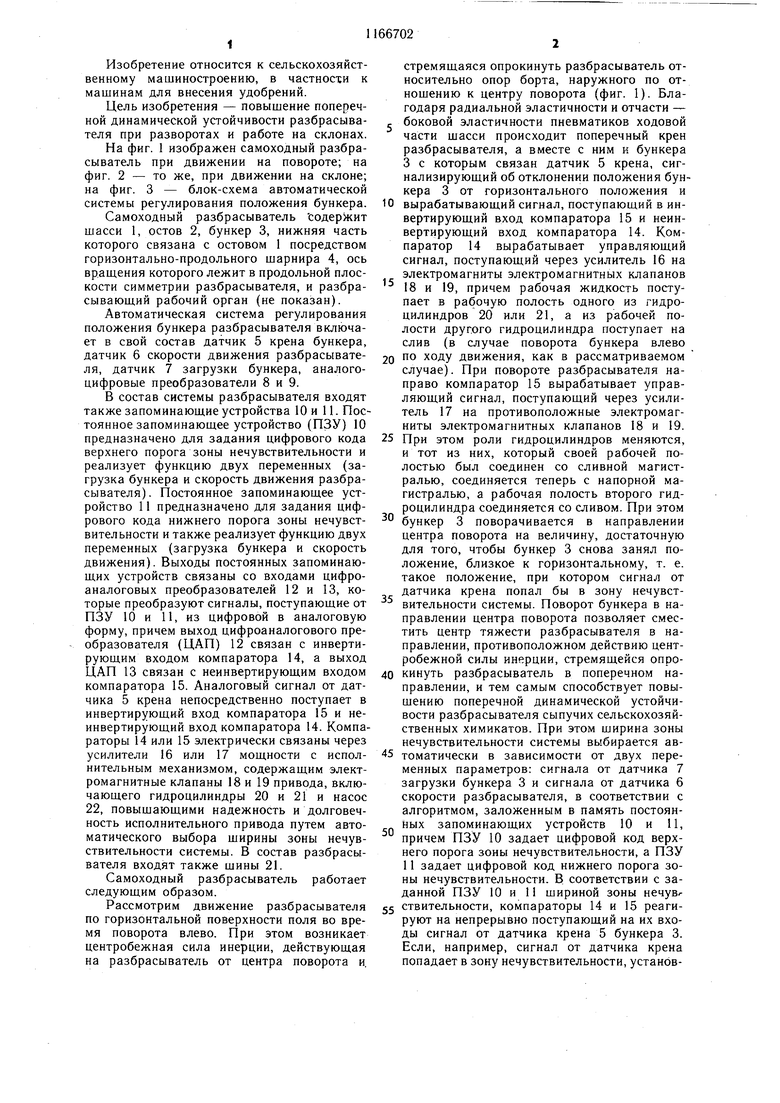
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации курса сельскохозяйственного агрегата | 1983 |
|
SU1160957A1 |
| Механизм управления дифференциалом ведущего моста колесной машины | 1987 |
|
SU1523411A1 |
| Автоматическая система регулирования давления воздуха в шинах транспортного средства | 1987 |
|
SU1472287A1 |
| Механизм блокировки дифференциала ведущего моста колесной машины | 1983 |
|
SU1115928A1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| АНАЛОГО-ЦИФРОВАЯ МНОГОПРОЦЕССОРНАЯ СИСТЕМА | 2006 |
|
RU2333533C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| МНОГОКАНАЛЬНАЯ АКУСТИКО-ЭМИССИОННАЯ СИСТЕМА ДИАГНОСТИКИ КОНСТРУКЦИЙ | 2001 |
|
RU2217741C2 |
| Функциональный аналого-цифровой преобразователь | 1986 |
|
SU1310855A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ МОСТОВЫХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2391655C2 |
САМОХОДНЫЙ РАЗБРАСЫВАТЕЛБ МИНЕРАЛЬНЫХ УДОБРЕНИЙ, содержащий шасси, остов, бункер для удобрений и разбрасываюш,ий рабочий орган, отличающийся тем, что, с целью повышения поперечной динамической устойчивости разбрасывателя при разворотах и работе на склонах, он снабжен автоматической системой регулирования положения бункера, включающей датчик скорости, датчики загрузки и крена бункера, два аналого-цифровых преобразователя, дна постоянно-запоминающих устройства и цифроаналоговых преобразователя, а также два компаратора и усилителя мощности, бункер в нижней части связан с остовом горизонтальным продольным шарниром, ось вращения которого расположена в плоскости симметрии разбрасывателя, и снабжен приводом с исполнительным механизмом, при этом выходы датчиков скорости и загрузки бункера через аналого-цифровые преобразователи и постоянные запоминающие устройства соединены с цифроаналоговыми преобразователями, выход одного из которых подключен к инвертирующему входу первого компаратора, выход другого - к неинвертирующему входу второго компаратора, причем выход датчика 9 крена соединен с неинвертирующнм входом первого компаратора и инвертирующим вхосл дом второго компаратора, выходы которых через усилители мощности электрически связаны с исполнительным механизмом привода бункера. О5 О5 о ю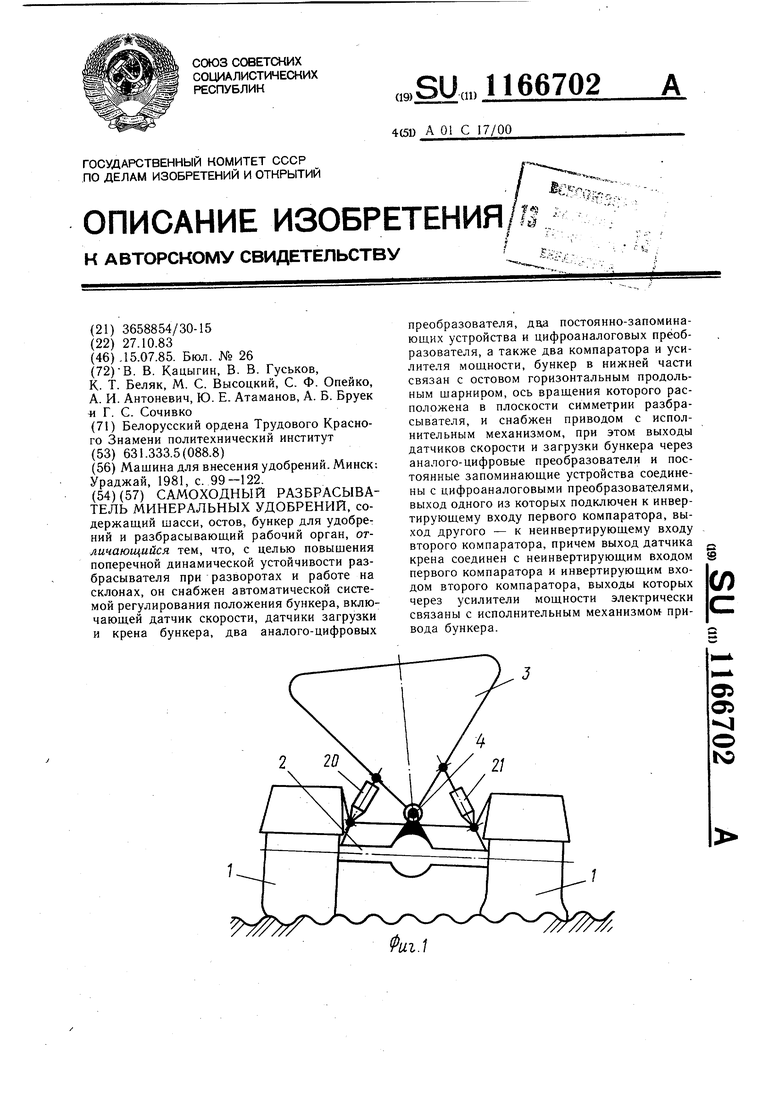
| Машина для внесения удобрений | |||
| Минск: Ураджай, 1981, с | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
