Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам моментной защиты стреловых кранов.
В известных в мировой практике системах автоматической защиты кранов с телескопической стрелой используется способ защиты от опрокидывания по грузовым характеристикам или их приведенным к узлу силоизмерителя значениям, суть которого излагается ниже.
В соответствии с “Правилами безопасной эксплуатации грузоподъемных кранов” Госгортехнадзора РФ или национальными “Предписаниями” зарубежных стран грузовая устойчивость свободно стоящего крана рассчитывается на основе кинетостатического уравнения опрокидывающих и восстанавливающих моментов [1]. Завод-изготовитель стрелового крана гарантирует его безопасную эксплуатацию, если перемещаемый телескопической стрелой груз не превышает предельно допустимых его значений на данном вылете стрелы заданной длины по паспортным грузовым характеристикам крана, рассчитанным разработчиками крана по методике “Правил...”.
Паспортные грузовые характеристики крана, и их приведенные к толкателю стрелы значения изображены на фиг.1. Здесь обозначены: длина телескопической стрелы 1 - минимальная, 2 - средняя, 3 - полная; L - вылет; G - масса груза; S - усилие в толкателе.
Для безопасной эксплуатации крана он оснащается системой автоматической защиты, следящей за нагрузкой и выключающей привода крана при равенстве груза его допустимому значению на данном вылете, заданному программой - грузовыми характеристиками. Этот способ защиты положен в основу работы всех известных приборов. Примером реализации этого способа могут служить устройства PAT DS350, EKS 83 (ФРГ), ОГБ3, ОГБ4, АЗК1 (РФ) и др., в рамках общего способа отличающиеся отдельными техническими решениями. В них используются следующие датчики: угла и длины стрелы, массы груза, усилия в штоке толкателя стрелы [2].
Принцип работы современной системы защиты.
В постоянное запоминающее устройство (ПЗУ) прибора защиты по адресам, соответствующим заданным вылетам и длине стрелы записываются, например, приведенные к штоку толкателя стрелы грузовые характеристики крана. При работе системы защиты по сигналам датчиков угла и длины стрелы вычисляется вылет. Коды сигналов вылета и длины стрелы поступают на адресные входы ПЗУ и считывают из него соответствующий код допустимого усилия. Коды сигналов датчика усилия в штоке и соответствующие данному вылету и длины стрелы допустимые значения усилия с выхода ПЗУ сравниваются компаратором. При равенстве сигналов на входах последнего он выдает сигнал отключения приводов. Недостатки известных систем защиты проистекают от способа, положенного в основу их работы [3, 4].
На фиг.1 приведены: грузовые характеристики крана (фиг.1а), и приведенные к усилию S в штоке толкателя стрелы их значения (фиг.1б); статические моментные характеристики крана с телескопической стрелой в функции вылета L и длины стрелы 1 приведены на фиг.2. Графики прямой и обратных функций угла ϕ наклона стрелы плеча h(ϕ ) момента усилия S на шток толкателя стрелы относительно шарнира ее поворота приведены на фиг.3.
Суждение об опрокидывающем моменте, линейного возрастающем с увеличением вылета (фиг.2), по гиперболически убывающему при этом допустимому грузу (фиг.1а) или изменяющемуся по более сложному закону усилию в штоке толкателя стрелы с максимальными значениями на малых и больших вылетах и минимальными изменениями на средних вылетах (фиг.1б) весьма условно. Кроме того, сравнение между собой двух переменных величин с существенно нелинейным характером функций S=S(l, L) и Sд=Sд(l, L) даже при малых погрешностях в отработке вылета Δ L, например, из-за реальной погрешности датчиков, приводят к большим погрешностям Δ S срабатывания защиты не говоря о других погрешностях [3]. Повышение точности и улучшение динамических и эксплуатационных характеристик крана возможно за счет предлагаемого, потенциально точного способа защиты.
Один из вариантов способа был реализован нами в приборе защиты по [6] и успешно прошел испытания.
Суть способа в следующем.
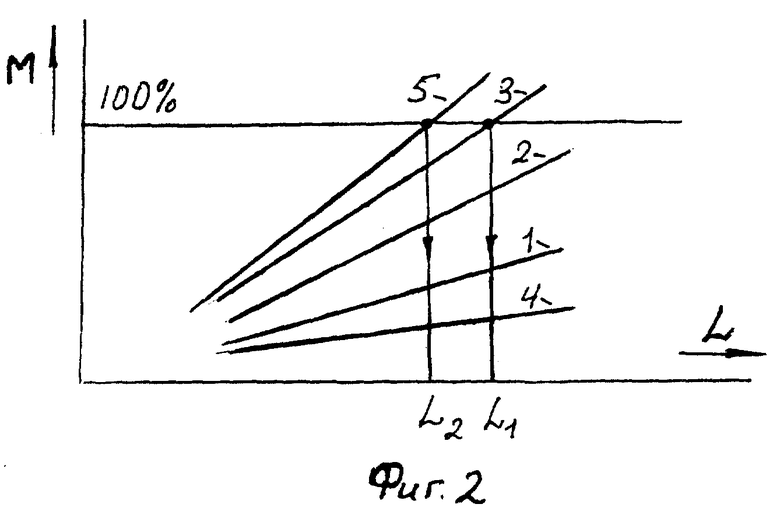
Записав уравнение моментов по “Правилам... ” с учетом их функциональных связей с переменными параметрами стрелы и приведя его к постоянной правой части, получим уравнение моментов. При этом постоянные в процессе движений стрелы с грузом моменты относительно ребра опрокидывания с учетом коэффициента запаса устойчивости представляют собой правую часть уравнения, а в левой части - все переменные моменты относительно того же ребра опрокидывания. Это уравнение является исходным в предлагаемом способе моментной защиты, принцип работы которой иллюстрируется на фиг.2.
Здесь функции переменных моментов обозначены:
1. - момент груза Q1 - Mгр1, 2. - момент масс стрелы - Мст; 3. - суммарный момент Mc1=Mгр1+Мст; 4. - момент груза Q2 - Мгр2; 5. - суммарный момент Мс2=Мгр2+Мст.
Горизонтальная прямая определяет правую часть уравнения и задает уровень ограничения по максимальному опрокидывающему моменту. Защита срабатывает на вылете, соответствующем точке пересечения функции суммарного момента с заданной горизонтальной прямой. Так грузу G1 соответствует суммарный момент - Mc1 прямая З и вылет L1 - срабатывания защиты, а грузу G2>G1 - момент Мс2 - прямая 5 и вылет L2 - срабатывания защиты. L2<L1, т.к. G2>G1, что соответствует вылетам для указанных грузов по паспортным грузовым характеристикам крана.
Таким образом, опрокидывающий момент приводится к одному “окну”, высота которого задается уровнем восстанавливающего момента. Поэтому с увеличением размеров опорного контура или массы противовеса высота “окна”, определяющая максимум опрокидывающего момента и срабатывания защиты, увеличивается.
В соответствии с “Правилами... ” грузовая устойчивость крана определяется для плоскости минимальной устойчивости крана, а в плане характеристики принимаются круговыми [1]. В связи с изложенным функциональное уравнение моментов имеет вид.

где Qгр, Qог, Gпр, GH, Gi - соответственно массы: груза, головки стрелы, противовеса и поворотной платформы, неподвижной части крана и i-той секции стрелы; li, Xi - соответственно длина и расстояние i-той секции стрелы от корня стрелы; R+a/2 - соответственно расстояние противовеса и приведенной к нему массы поворотной платформы от ребра опрокидывания, а/2 - расстояние от оси поворотной платформы от ребра опрокидывания; а - размер опорного контура; ϕ - угол наклона стрелы к горизонту; Кзу - коэффициент запаса устойчивости; Х - величина полного удлинения телескопической стрелы; lкор - величина увеличения вылета из-за отклонения оси стрелы от прямолинейной; r - расстояние коренного шарнира стрелы относительно оси поворотной платформы.
Определим функциональную связь сигнала датчика усилия в штоке толкателя стрелы S с переменными параметрами стрелы [4]. Составим уравнение моментов относительно шарнира корня стрелы и разрешим его относительно S, тогда получим:

где d - расстояние грузового каната от шарнира стрелы, Un, η n - соответственно кратность и к.п.д. полиспаста,

где h(ϕ ) - функция плеча момента усилия S относительно шарнира стрелы,
θ =ϕ +β -γ ; А, N, β , γ - постоянные параметры.
На фиг 3. приведены графики прямой и обратной функции h(ϕ ) для кранов КС 4571-16т, КС 5573-25 т, характер которых отличается незначительно.
Сравнивая левую часть выражения (1) и (2) заключаем, что (2) содержит полезную информацию об опрокидывающем моменте, задача в том как ее выделить?
Для того чтобы освободится от второго сомножителя в (2) умножим обе части этого уравнения на функцию h(ϕ ), обратную этому сомножителю, тогда получим уравнение моментов относительно шарнира стрелы:

Выражения в фигурных скобках (1) и (4) отличаются слагаемыми Qгрd/Unη n=-G1d;

где G1 - усилие в канате грузового барабана, d - расстояние каната от оси стрелы.
Прибавив к правой части (4) выражение первого слагаемого и вычитая второе получим полное его соответствие выражению в фигурных скобках (1).
Далее вычитая из откорректированного выражения (4) слагаемое Qгрa/2 получим синтезированное уравнение полностью соответствующее левой части (1).
Для этого используются: сигнал датчика усилия в штоке толкателя стрелы, функциональный преобразователь h(ϕ ), управляемый сигналом датчика угла стрелы; отработка слагаемых, содержащих переменную Qгр, производится по сигналу датчика массы груза или по результату его вычисления из грузового момента, равного

где Моп - общий опрокидывающий момент; Мcт - вычисленный устройством защиты момент масс стрелы.
Поделив Мгр на выражение [(l1+X)cosϕ +lкop], представляющее собой плечо момента груза относительно шарнира стрелы, вычисленное устройством защиты по сигналам датчика угла и длины стрелы получим расчетное значение массы груза.
Для реализации предлагаемого способа используется тот же набор датчиков, что и в известных устройствах, работающих по заданной программе, но в отличие от последних он позволяет создать адаптивные следящие системы, непрерывно вычисляющие значение фактического опрокидывающего момента.
Предлагаемый способ защиты может быть реализован чисто аппаратно или программно, но наш взгляд оптимальным является аппаратно-программный подход.
Следует отметить, что используя сигнал функционального преобразователя h(ϕ ) в качестве регулирующего скорость перемещения штока толкателя стрелы, можно исключить угловое ускорение телескопической стрелы при ее “подъеме - опускании” - один из источников ее колебаний, связанный с нелинейностью передаточной функции: скорость толкателя - скорость стрелы.
В свою очередь превышение сигнала опрокидывающего момента его произвольно установленного значения, меньшего допустимому, можно использовать для замедления скорости приводов в функции опрокидывающего момента, начиная с установленного значения до полной остановки по достижении моментом максимального значения.
Кроме того, используя отрицательно-обратную связь по скорости изменения опрокидывающего момента, можно осуществить активное демпфирование колебаний крана, а сравнивая между собой вычисленное из грузового момента значение массы груза с сигналом датчика массы груза можно по их разности контролировать точность работы системы защиты в целом (вместе с датчиками).
УСТРОЙСТВО МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ
Среди многообразия частных решений известен, например, ограничитель грузоподъемности для кранов с телескопической стрелой [5]. Он содержит: узел преобразования угла наклона и длины стрелы, сумматор, множительное устройство, вычислительный узел, схему сравнения. Устройство не обладает адаптивностью к моментным нагрузкам в связи с чем надежность его низка и ограничены функциональные возможности. Известно также устройство защиты стрелового крана, управляющее скоростью опускания стрелы с грузом [4], состоящее из программного ограничителя грузоподъемности крана с телескопической стрелой, потенциометра со скользящим контактом, вращаемым мотор-редуктором, питаемым сигналом ограничителя грузоподъемности, равным разности напряжений силоизмерителя и программатора допустимых значений. По мере опускания стрелы с грузом уменьшается вышеназванное разностное напряжение, и замедляются обороты двигателя до полной остановки по достижении предельных значений. Для управления скоростью опускания стрелы используется электрически управляемый дроссель, включенный в ответвление напорного трубопровода. Регулирование скорости привода осуществляется за счет перераспределения потоков жидкости гидроцилиндра и дросселя, жидкость с выхода которого сливается в бак. По мере уменьшения разности сигналов на выходе ограничителя грузоподъемности (ОГ) увеличивается проходное отверстие дросселя и уменьшается подача жидкости в гидроцилиндр и скорость привода замедляется до полной остановки, при напряжении на выходе ОГ, равном нулю. Недостатки этого устройства связаны со способом отработки напряжения, управляющего скоростью привода стрелы, которое обусловлено программным характером работы ограничителя момента. Наиболее близким техническим решением к изобретению является устройство по [6], содержащее узлы: преобразования механических усилий в электрический сигнал; преобразования угла наклона и длины стрелы, включающий вычислительный узел с множительным устройством и аппроксиматор, подключенный своим входом к преобразователю угла наклона, а выходом через множительное устройство и сумматор вычислительного узла - к схеме сравнения...
Однако в этом устройстве не реализованы все возможности и преимущества беспрограммной моментной защиты как-то: выработка сигналов управления скоростями приводов, активного демпфирования колебаний крана, а также автоконтроль точности работы самой системы защиты в целом (вместе с датчиками).
В известных устройствах защиты с целью слежения за их работой конролируются: обрыв в цепи питания датчиков, отклонение напряжений питания устройств защиты, погрешность работы аналого-цифрового преобразователя.
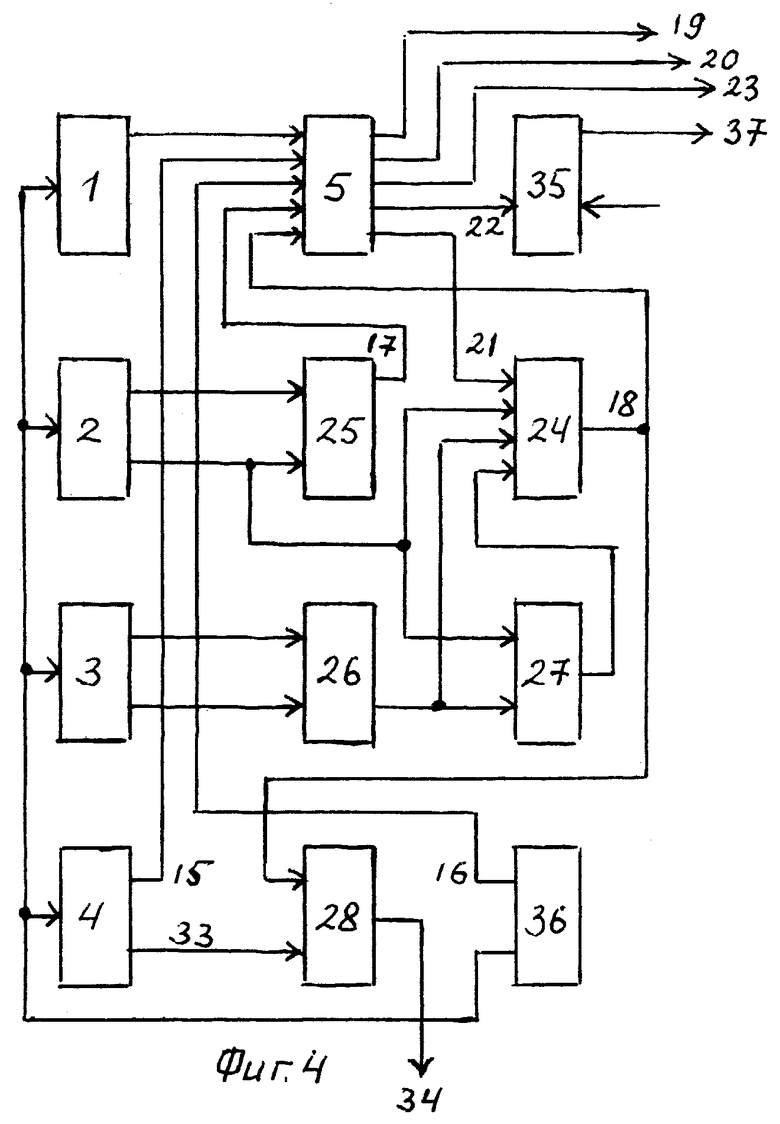
На фиг.4 приведена структурная схема одного из вариантов реализации моментной защиты крана с телескопической стрелой.
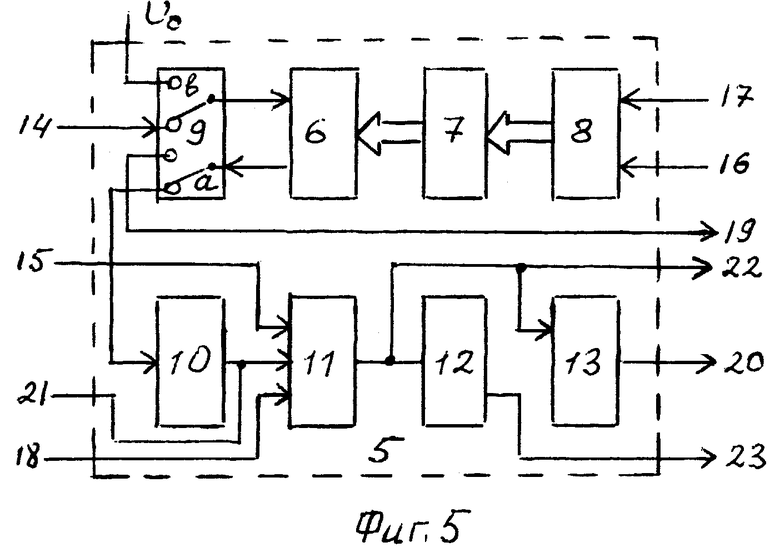
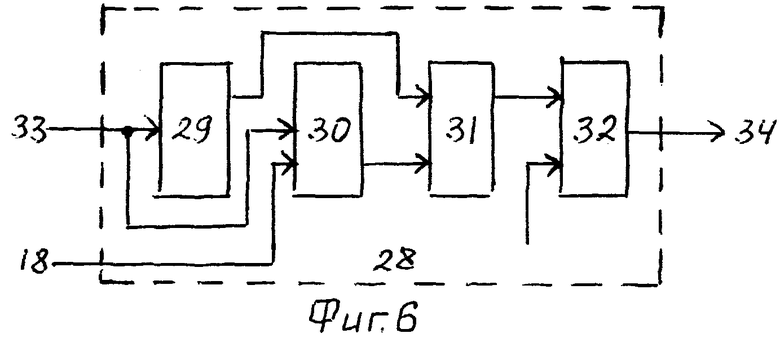
Устройство содержит: первичные преобразователи: усилия в штоке толкателя стрелы 1; угла наклона 2 и длины 3 стрелы, в качестве которых используются синусно-косинусные поворотные трансформаторы (СКВТ); массы груза 4; Узлы: 5 синтезирования опрокидывающего момента; 24 вычисления массы груза; 25, 26 преобразования угла в длительность импульсов ШИМа; 27 перемножения по схеме ШИМ-АИМ; 28 автоконтроля точности работы устройства защиты. Компаратор опрокидывающего момента 35, и генератор счетных импульсов, и питания датчиков 36. На фиг.5 приведена структурная схема узла 5 синтезирования опрокидывающего момента, состоящая: из последовательно включенных кодера 8 длительности импульсов угла наклона стрелы в двоичный код, постоянного запоминающего устройства (ППЗУ) 7 и множительного цифроаналогового преобразователя (МЦАП) 6, аналоговые вход и выход которого связаны с электронным переключателем 9; последовательно включенными фильтром НЧ 10, сумматором 11, выходом, связанным с входами схемы “зона нечувствительности” 12 и дифференциатора 13. На фиг.6 приведена структурная схема узла 28 автоконтроля точности работы системы защиты, состоящая из последовательно включенных: вычитателя 30 измеренной и вычисленной массы груза, перемножителя 31 и компоратора 32 точности работы системы защиты. При этом вычитатель 30 входами связан с выходами 18 и 33 вычислителя массы груза 24 и ее измерителя 4, связанного также со входом преобразователя с нелинейно падающей характеристикой 29, выходом связанного со вторым входом перемножителя 32.
Принцип работы. Устройство моментной защиты крана с телескопической стрелой (фиг.4) работает в соответствии с уравнением (1), синтез которого осуществляется узлом опрокидывающего момента 5, вход которого связан с выходом 14 преобразователя усилия 1 в штоке толкателя стрелы (фиг.5), сигнал датчика 1, описываемый уравнением (2), через электронный переключатель 9 (положение “а”) поступает на аналоговый вход цифроаналогового преобразователя 6, цифровыми входами связанного с выходами ППЗУ7, в котором по адресам, соответствующим кодам угла наклона стрелы, записаны дискретные значения функции h(ϕ ), обратной второму сомножителю выражения (2). Входы ППЗУ7 связаны с выходами кодера 8, входами связанного с выходом 16 счетных импульсов генератора 36 и выходом 17 преобразователя угла в длительность импульсов 25. В последнем происходит двойное преобразование: сигналы датчика 2 преобразуются в угол, а угол - в длительность импульсов ШИМа. Датчик 2 используется одновременно для отработки угла и его синусно-косинусных функций, используемых в вычислительном узле 24, а сочетание импульсов ШИМа с амплитудно-импульсным модулятором (АИМ) 27 образуют перемножитель по схеме ШИМ-АИМ. При “подъеме-опускании” стрелы изменяются коды угла ее наклона на выходе 8 и из ПЗУ 7 считываются соответствующие дискретные значения функции h(ϕ ), которые в МЦАП6 перемножаются с сигналом датчика 1. Аналоговый выходной сигнал 6, представляющий собой функцию (4) через контакт “а” переключателя 9 и фильтр НЧ 10 поступает на вход сумматора 11, к которому прибавляется сигнал усилия в канате грузового барабана с выхода 15 датчика 4, и вычитается сигнал с выхода 18 вычислительного узла 24 с соответствующими коэффициентами слагаемых. Сигнал с выхода 22 сумматора 11, соответствующий опрокидывающему моменту, - левая часть уравнения (1) поступает на вход компаратора 35, в котором сравниваются с постоянным восстанавливающим моментом - правая часть уравнения (1), и входы схемы “зона нечувствительности” 12 и дифференциатора 13. Выходные сигналы компаратора 35, схемы “зона нечувствительности” 12 и дифференциатора 13 соответственно на выходах 37, 23, 20 используются соответственно для отключения приводов при максимуме опрокидывающего момента, замедления скоростей приводов, начиная с установленного значения, и для активного демпфирования колебаний крана с помощью отрицательно-обратной связи по скорости изменения опрокидывающего момента.
Кроме того, к выходам 22 и 33 подключаются индикаторы момента и массы груза.
При положении “в” переключателя 9 сигнал на выходе МЦАП6 соответствует функции h(ϕ ). Последний с выхода 19 переключателя 9 поступает на вход схемы программного управления скоростью привода “подъема-опускания” стрелы благодаря чему скорость стрелы стабилизируется с целью исключения ее углового ускорения. В процессе работы предлагаемого устройства защиты непрерывно осуществляется контроль точности его работы, сравнивая отклонение массы груза, определенной двумя независимыми методами, например, измеренным непосредственно датчиком массы груза и вычисленным его значением через грузовой момент. При этом учитывая большой возможный динамический диапазон изменения массы груза разность масс груза приводится к постоянной величине допустимого отклонения во всем диапазоне.
На фиг.6 изображен узел автоконтроля погрешности работы системы защиты в целом вместе с датчиками. Он содержит: преобразователь, отрабатывающий гиперболически убывающую функцию массы груза 29, сумматор 30, перемножитель 31, компаратор допустимого отклонения напряжения. Он работает следующим образом. Вычисленные узлом 24 и измеренные датчиком 4 сигналы через выходы 18 и 33 поступают на входы вычитателя 30, выходом связанного со входом перемножителя 31, вторым входом связанного с выходом преобразователя с нелинейно падающей характеристикой 29, входом связанного с выходом 33 датчика 4. Для приведения разности абсолютных погрешностей к постоянной величине в диапазоне изменения массы груза модуль разности погрешностей в 31 умножается, например, на гиперболически убывающее напряжение массы груза на выходе 29. Выходной сигнал 31 сравнивается с заданной постоянной величиной. При превышении сигнала 31 заданной величины компаратор 32 срабатывает и запрещает работу крана.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Вайнсон А.А. Подъемно-транспортные машины - М.: Машиностроение, 1989.
2. Патент 4.133032 (США). Опубл. 02.01.79.
3. Мамаев К.М. Принципы построения ограничителей грузоподъемности гидравлических кранов. - Известия Северо-Кавказкого центра высшей школы - Ростов н/Д, 1986, №1, с.90... 92.
4. Мамаев К.М. О функциональных связях нагрузок с сигналами силоизмерителей в системах защиты автокранов. РАН - Вестник Дагестанского научного центра, г. Махачкала, 2000, №7, с.49... 57.
5. Мамаев К.М. и др. Авт. свидетельство СССР №565007. Опубл. 14.03.1975.
6. Мамаев К.М. и др. Авт. свидетельство СССР №732200. Опубл. 28.03.1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ЗАЩИТЫ АВТОКРАНА ОТ ОПРОКИДЫВАНИЯ И ПЕРЕГРУЗОК С УПРАВЛЕНИЕМ СКОРОСТЯМИ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500608C2 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1975 |
|
SU565007A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| Предохранительное устройство стрелового крана | 1982 |
|
SU1101402A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737353A2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737352A2 |
| Ограничитель грузоподъемности стрелового крана | 1988 |
|
SU1527137A1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА СТРЕЛОВОГО ТИПА С МАНЕВРОВОЙ СТРЕЛОЙ | 2006 |
|
RU2319656C1 |


Группа изобретений относится к области подъемно-транспортного оборудования. Вместо программного способа защиты по грузовым характеристикам предложен беспрограммный способ моментной защиты, осуществляемый в полном соответствии с уравнением моментов, функционально связывающим нагрузки на кран с переменными параметрами стрелы. Фактический опрокидывающий момент рассчитывается и синтезируется устройством защиты по сигналам датчиков и приводится к одному “окну”, верхняя граница которого соответствует максимуму опрокидывающего момента и срабатыванию защиты и определяется постоянной частью восстанавливающего момента, зависящего от размеров опорного контура и массы противовеса. Указанное уравнение является адаптивным к моментным нагрузкам и учитывает их изменения автоматически. Группа изобретений позволяет создать защиту с повышенными надежностью и точностью, что улучшает эксплутационные и динамические характеристики крана. 2 н. и 4 з.п. ф-лы, 6 ил.
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| US 4133032 А, 02.01.1979 | |||
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1975 |
|
SU565007A1 |
| RU 94011378 А1, 27.11.1996. | |||

