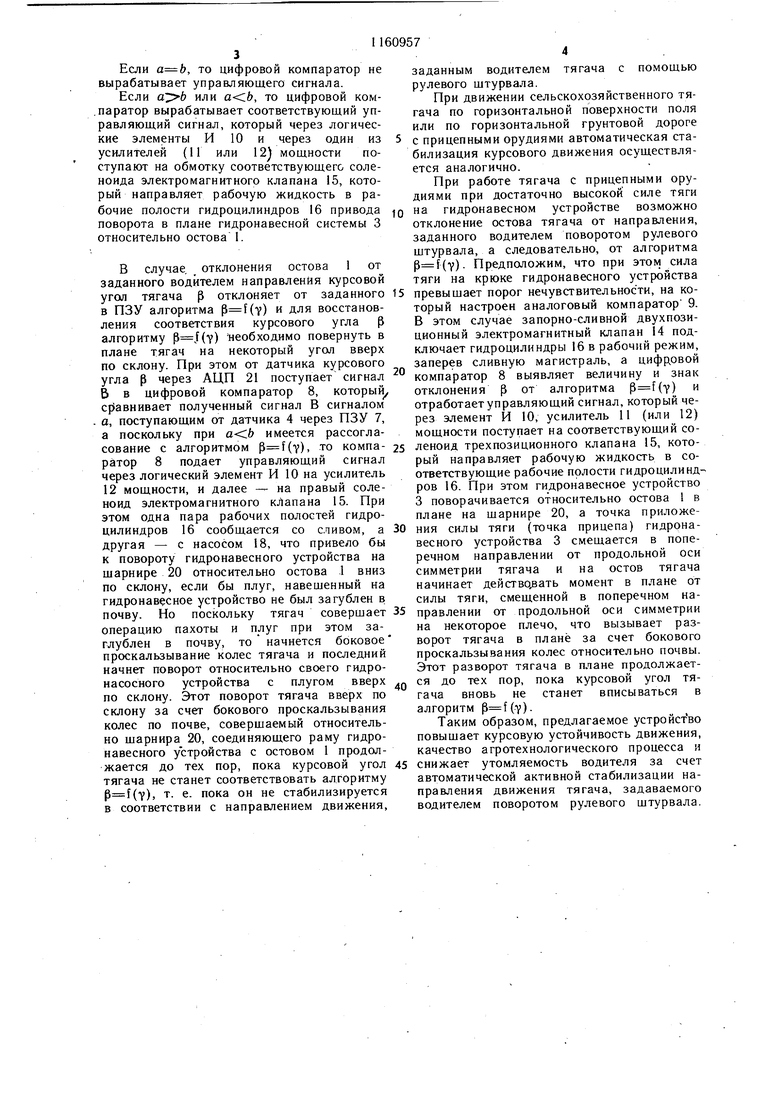
Изобретение относится к сельскому хозяйству, а именно к сельскохозяйственным агрегатам, работающим на крутых склонах. Известен крутосклонный трактор со стабилизацией ведущего моста и механизмом выравнивания остова при работе на склонах крутизной до 20° 1. Недостатком известного трактора является отсутствие механизма сохранения заданного водителем направления движения независимо от крутизны склона и величины направления силы тяги на гидронавеснои системе. Наиболее близким к предлагаемому является устройство, содержащее гидронао..п .„v...,,j, «с..-.г.„г. .jp... .. .. весную систему, датчики курса и положения направляющих колес тягача и электронный блок управления 2.. Недостаток данного устройства - недостаточная курсовая устойчивость при изменениях направления и величины силы тяги. Цель изобретения - повыщение курсовой устоичивости агрегата при изменениях направления и величины силы тяги. Поставленная цель достигается тем, что в устройстве для стабилизации курса сельскохозяйственного агрегата, состоящего из тягача и навесного орудия, содержащем гидронавесную систему, датчики курса и положения направляющих колес тягача и электронный блок управления, гидронавесная система снабжена датчиком силы тяги и гидроприводом поворота в плане, имеющим включенные параллельно трехпозиционный и двухпозиционный электромагнитные клапаны, а электронный блок управления содержит постоянное запоминающее устройство, цифровой и аналоговый компараторы, первую и вторую схемы И, аналогоцифровой преобразователь и три усилителя мощности, при этом датчик положения направляющих колес имеет цифровой выход, который связан с входом постоянного запоминающего устройства, выход которого соединен с первым входом цифрового компаратора, к второму входу которого через аналого-цифровой преобразователь подключен датчик курса, причем первый и второй выходы цифрового компаратора соединены с первыми входами соответственной первой и второй схем И, вторые входы которых объединены и подключены к выходу аналогового компаратора, на неинвертирующий вход которого подключен датчик силы тяги; а на инвертирующий подключено опорное напряжение, выходы первой и второй схем И через первый и второй усилители мощности связаны с электромагнитами трехпозиционного клапана, а электромагнит двухпозиционного клапана через третий усилитель мощности подключен к выходу аналогового компаратора. На фиг. 1 изображен сельскохозяйственный агрегат в плане; на фиг. 2 - схема соединения агрегата с орудием в вертикальной плоскости; на фиг. 3 - схема устройства для стабилизации курса. Устройство для стабилизации курса сельскохозяйственного агрегата содержит сельскохозяйственный тягач, состоящий из остова 1, ходовой части 2 гидронавесного устройства 3 с системой автоматического регулирования, которая содержит цифровой датчик 4 угла поворота направляющих колес, датчик 5 силы тяги (например, тензозвено), датчик 6 курсового угла (например, гирополукомпас), постоянное запоминающее устройство (ПЗУ) 7, цифровой компаратор 8, аналоговый компаратор 9, два логических элемента И 10, три усилителя 11-13 мощности, двухпозицион« и электромагнитный клапан 14, трехпозиционный электромагнитный клапан 15, .гидроцилиндры 16 с возвратными пружинами 17, насос 18, предохранительный клапан 19,.вертикальный центральный щар которым связана рама гидронавес устройства 3с остовом 1 . тяного устройства 6 с гача, аналого-цифровой преобразователь (АЦП) 21. Устройство работает следующим обраПри наличии силы тяги, величина которой превышает нижнее пороговое значение зоны нечувствительности, сигнал от датчика 5 силы тяги поступает в аналоговый компаратор 9, в котором сравнивается опорное напряжение Uon, соответствующее ниж.нему порогу зоны нечувствительности с напряжением, поступающим от датчика силы тяги. Поскольку второе напряжение оказывается большим, то компаратор 9 вырабатывает управляющий сигнал, который подается на усилитель 13 мощности, а затем на обмотку соленоида двухпозиционного электромагнитного (запорно-сливного) клапана 14, который при этом переводится в запорное положение. При этом автоматическая система включается в работу благодаря тому, что включаются в работу гидроцилиндры 16, причем порщневая полость одного из них соединена со щтоковой полостью другого. Водитель, двигаясь на тягаче по поперечному склону, поворачивает рулевой штурвал на некоторый угол, неюбходимый по условиям движения или выполнения агротехнического процесса. При этом сигнал от цифрового датчика положения направляющих колес поступает в ПЗУ, которое вырабатывает цифровой сигнал в соответствии с заложенным в его память алгоритмом вида (Y). Этот цифровой сигнал а поступает на вход цифрового компаратора 8, который сравнивает сигнал а с сигналом Ь, поступающим от датчика курсового угла Р через аналого-цифровой преобразователь 21 При этом возможны три случая; , а Ь, . Если , то цифровой компаратор не вырабатывает управляющего сигнала. Если или , то цифровой ком.паратор вырабатывает соответствующий управляющий сигнал, который через логические элементы И 10 и через один из усилителей (11 или 12) мощности поступают на обмотку соответствующего соленоида электромагнитного клапана 15, который направляет рабочую жидкость в рабочие полости гидроцилиндров 16 привода поворота в плане гидронавесной системы 3 относительно остова 1. В случае, отклонения остова 1 от заданного водителем направления курсовой угол тягача р отклоняет от заданного в ПЗУ алгоритма (Y) и для восстановления соответствия курсового угла р алгоритму P,f(v) необходимо повернуть в плане тягач на некоторый угол вверх по склону. При этом от датчика курсового угла р через АЦП 21 поступает сигнал В в цифровой компаратор 8, который сравнивает полученный сигнал В сигналом . а, поступающим от датчика 4 через ПЗУ 7, а поскольку при имеется рассогласование с алгоритмом (v), то компаратор 8 подает управляющий сигнал через логический элемент И 10 на усилитель 12 мощности, и далее - на правый соленоид электромагнитного кЛапана 15. При этом одна пара рабочих полостей гидроцилиндров 16 сообщается со сливом, а другая - с насосом 18, что привело бы к повороту гидронавесного устройства на щарнире 20 относительно остова .1 вниз по склону, если бы плуг, навещенный на гидронав сное устройство не был загублен в почву. Но поскольку тягач совершает операцию пахоты и плуг при этом заглублен в почву, то начнется боковое проскальзывание колес тягача и последний начнет поворот относительно своего гидронасосного устройства с плугом вверх по склону. Этот поворот тягача вверх по склону за счет бокового проскальзывания колес по почве, совершаемый относительно шарнира 20, соединяющего раму гидронавесного устройства с остовом 1 продолжается до тех пор, пока курсовой угол тягача не станет соответствовать алгоритму (V), т. е. пока он не стабилизируется в соответствии с направлением движения, заданным водителем тягача с помощью рулевого штурвала. При движении сельскохозяйственного тягача по горизонтальной поверхности поля или по горизонтальной грунтовой дороге с прицепными орудиями автоматическая стабилизация курсового движения осуществляется аналогично. При работе тягача с прицепными орудиями при достаточно высокой силе тяги на гидронавесном устройстве возможно отклонение остова тягача от направления, заданного водителем поворотом рулевого щтурвала, а следовательно, от алгоритма (Y). Предположим, что при этом сила тяги на крюке гидронавесного устройства превышает порог нечувствительности, на который настроен аналоговый компаратор 9. В этом случае запорно-сливной двухпозиционный электромагнитный клапан 14 подключает гидроцилиндры 16 в рабочий режим, заперев сливную магистраль, а цифровой компаратор 8 выявляет величину и знак отклонения р от алгоритма (Y) и отработает управляющий сигнал, который через элемент И 10, усилитель 11 (или 12) мощности поступает на соответствующий соленоид трехпозиционного клапана 15, который направляет рабочую жидкость в соответствующие рабочие полости гидроцилиндров 16. При этом гидронавесное устройство 3 поворачивается относительно остова 1 в плане на шарнире 20, а точка приложения силы тяги (точка прицепа) гидррнавесного устройства 3 смещается в поперечном направлении от продольной оси симметрии тягача и на остов тягача начинает действо,вать момент в плане от силы тяги, смещенной в поперечном направлении от продольной оси симметрии на некоторое плечо, что вызывает разворот тягача в плане за счет бокового проскальзывания колес относительно почвы. Этот разворот тягача в плане продолжается до тех пор, пока курсовой угол тягача вновь не станет вписываться в алгоритм (.-y). Таким образом, предлагаемое устройство повыщает курсовую устойчивость движения, качество агротехнологического процесса и снижает утомляемость водителя за счет автоматической активной стабилизации направления движения тягача, задаваемого водителем поворотом рулевого щтурвала.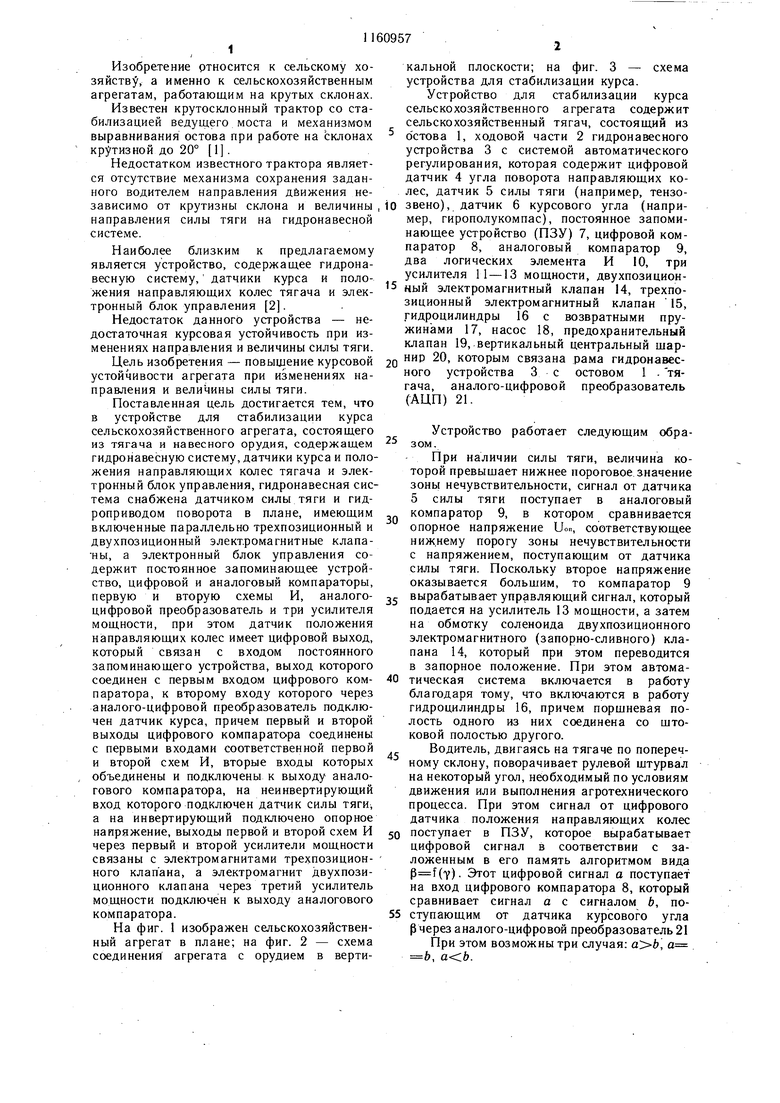
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2018453C1 |
| Колесное транспортное средство для работы на склонах | 1987 |
|
SU1463523A1 |
| Сельскохозяйственный агрегат | 1986 |
|
SU1461381A1 |
| Машинно-тракторный агрегат | 1979 |
|
SU770902A1 |
| Самоходный разбрасыватель минеральных удобрений | 1983 |
|
SU1166702A1 |
| Мобильное энергетическое средство | 1988 |
|
SU1504148A1 |
| Тормозное управление автопоезда | 1987 |
|
SU1423443A1 |
| Тягач для почвообработки | 1984 |
|
SU1310247A1 |
| Стабилизирующее устройство для сельскохозяйственных агрегатов,работающих на склонах | 1983 |
|
SU1101187A1 |
| Трактор для работы на склоне | 1989 |
|
SU1726289A1 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КУРСА СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА, состоящего из тягача и навесного орудия, содержащее гидронавесную систему, датчики курса и положения направляющих колес тягача и электронный блок управления, отличающееся тем, что, с целью повышения курсовой устойчивости при изменениях направления и величины силы тяги, гидронавесная система снабжена датчиком силы тяги и гидроприводом поворота в плане, имеющим включенные параллельно трехпозиционный и двухпозиционный электромагнитные клапаны, а электронный блок управления содержит постоянное запоминающее устройство, цифровой и аналоговый компараторы, первую и вторую схемы И, аналого-цифровой преобразователь и три усилителя мощности, при этом датчик положения направляющих колес имеет цифровой выход, который связан с входом постоянного запоминающего устройства, выход которого соединен с первым входом цифрового компаратора, к второму входу которого через аналого-цифровой преобразователь подключен датчик курса, причем первый и второй выходы цифрового компаратора соединены с первыми входами соответственно первой и второй схем И, вторые входы которых объединены и подI ключены к выходу аналогового компаратора, на неинвертирующий которого (Л подключен датчик силы тяги, а на инвертирующий подключено опорное напряжение, выходы первой и второй схем И через первый и второй усилители мощности связаны с электромагнитами трехпозиционного клапана, а электромагнит двухпозиционного клапана через третий усилитель мощности подключен к выходу аналогового компаратора. со ел 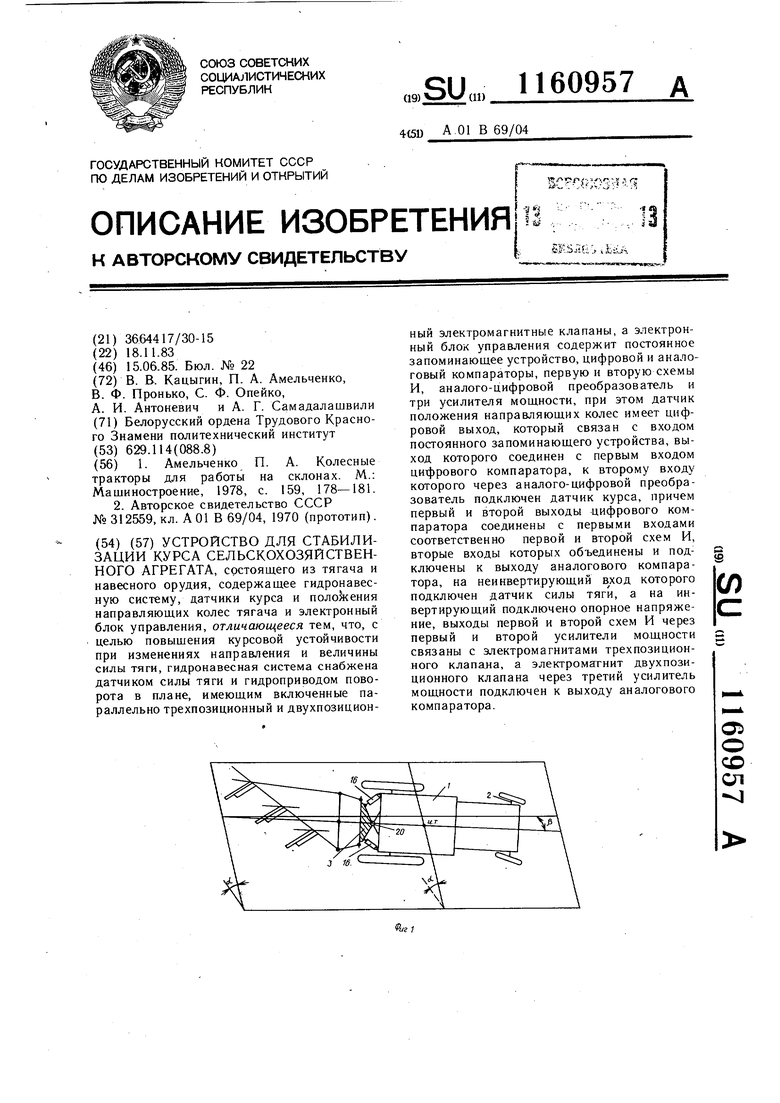
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Амельченко П | |||
| А | |||
| Колесные тракторы для работы на склонах | |||
| М.: Машиностроение, 1978, с | |||
| Катодное реле | 1918 |
|
SU159A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 0 |
|
SU312559A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
