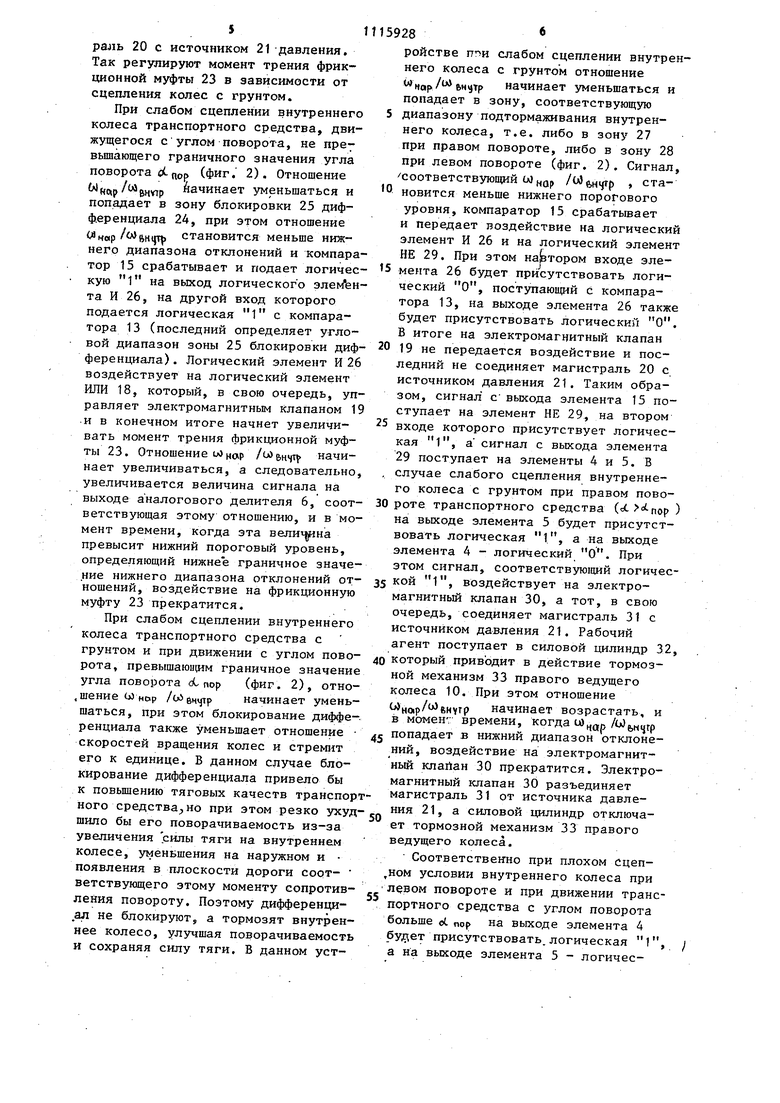
Изобретение относится к автомобильному и тракторному машиностроению и касается блокировки дифференциалов в трансмиссии транспортных средств. , . . Известен механизм блокировки дифференциала ведущего моста колесной машины, содержащий источник давления, фрикционную, муфту блокировки дифференциала с управлением от силового цилиндра, связанного с электромагнитным клапаном, два тормозных устройства, датчики скоростей вращения колес ведущего моста, аналоговый делитель, соединенный с одним из компараторов. Данное устройство определяет разность скоростей враще ния колес и сравнивает ее с пороговой величиной, которая выбирается и условия невключения блокировки дифференциала при движении транспортного средства с максимальным углом поворота и в случае превышения указанной разности над пороговой величиной, увеличивает момент трения фр ционной муфты блокировки дифференциала до тех пор,, пока эта разность не станет меньше пороговой величины В данном механизме погрешность опре деления момента времени включения блокировки дифференциала транспортн го средства определяется радиусом поворота, положением ведущих колес относительно центра поворота и скоростью движения транспортного средства 2. Однако указанная погрешность при водит к несвоевременности блокирования дифференциала и сказывается . на проходимости колесной машины. Кр ме того, устройство не обеспечивает повышение тяговых качеств при одновременном сохранении дифференциальных свойств при попадании одного из колес в плохие сцепные условия. Цель изобретения - повышение про ходимости транспортного средства и экономии топлива. Указанная цель достигается тем, что механизм блокировки дифференциала ведущего моста колесной машины, содержащий источник давления, фрикционную муфту блокировки дифференциала с управлением от силового 1Щлиндра, связанного с электромагнитным клапаном, два тормозных устройства, датчик скоростей вращения колес ведущего моста,- аналоговый дели тель, соединенный с одним из компаратор 3, снабжен датчиком поворота управляемых колес, дополнительными электромагнитными клапанами и силовыми цилиндрами включения тормозных устройств, запоминающим устройством, выходы которого связаны с цифроаналоговым преобразователем, погическими элементами ИЛИ, НЕ и И и аналоговым коммутатором, через который датчики угловых скоростей соединены с аналоговым делителем, связанным своим выходом с неинвертирующим входом одного компаратора и с инвертирующим входом другого .компаратора, выход которого соединен с одним входом логического элемента ИЛИ через один логический элемент И и связан с другим логическим элементом И, а выход первого компаратора соединен с другим входом логического элемента ИЛИ, при этом выход цифроаналогового преобразователя связан с инвертирующим входом первого компаратора и через потенциометр с неинвертирующим входом второго компаратора и с инвертирующим входом третьего компаратора, который снабжен нёинвертирующим входом для задания порогового уровня, причем выход третьего компаратора связан с BTOpbiM входом третьего логического элемента И и через логический элемент НЕ - с вторым входом последнего из логических элементов И, вьтход которого, в свою очередь, соединен с входами первых логических элементов И, а выходы последних связаны с дополнительными электромагнитными клапанами управления дополнительными силовыми цилиндрами. На фиг. 1 изображена фрикционная схема устройства, используемая для реализации предложенного способа; на фиг. 2 - зависимость отношения скоростей вращения наружного и внутреннего 1Солес от направления и угла. поворота транспортного средства. . При движении колесной машины с помощью цифрового датчика 1 определяют направление и угол поворота транспортного средства. По цифровому коду, поступаемому с датчика 1, с помощью постоянного запо инающего устройства 2 задается цифровой код требуемого отношения скоростей вращения колес, а также вьфабатывается двухбитовый управляющий код, посту3пающий на аналоговый коммутатор 3 и на логические элементы И 4 и 5. Циф ровой код отношения скоростей вращения может быть выбран с учетом дви жения транспортного средства по неровнастям. Управляющий код может принимать следующие значения: 10 при правом повороте и прямолинейном движении транспортного средства, 01 - при левом повороте. При пра,вом повороте и прямолинейном движении транспортного средства аналоговый коммутатор 3 будет подключать к одному из входов аналогового делителя 6 сигнал, поступакщий от датчика скорости вращения левого ведущего колеса 8, а к другому - сигнал, поступающий от датчика 9 скорости вращения правого ведущего колеса 10, При левом повороте к этому входу аналогового делителя 6 будет поступать сигнал от датчика 9 скорости вращения правого ведущего колеса 10, а на другой вход соответственно сигнал от датчика 7 скорости вращения левого ведущего колеса 8, тем самым Делителем 6 будет определяться анало говая величина, соответствующая отношению скорости вращения наружного колеса к скорости вращения внутреннего колеса. Цифроаналоговый преобразователь преобразует цифровой код, поступающи с постоянного запоминающего устройст ва 2 в аналоговую величину и тем самым задает верхнее граничное значение верхнего диапазона отклонений отнош ний угловых скоростей колес от значений, определяемых кинематикой поворота. Нижнее граничное значение нижнего диапазона отклонений отноше ний угловых скоростей колес задает-, ся потенциометром 12. Таким образом, верхнее граничное значение верхнего диапазона отклоне ний и ниркнее граничное значение ниж него диапазона отклонений отношений угловых скоростей колес зависят от. абсолютного угла поворота транспорт ного средства и могут быть выбраны с учетом движения транспортного сре ства по ухабам. Сигнал с цифроанало гового преобразователя 11 поступает на неинвертирующие входы компараторов 13 и 14 и через потенциометр 12 на неинвертирующий вход компа ратора 15. На неинвертирующий вход компаратора 13 подается пороговая вели 28 чина и,о/, которая заедает граничное значение угла поворота колес (фиг.2), определяющее диапазон подтормаживания внутреннего колеса. Кривая 16 представляет собой расчетную зависимость отношения скорости вращения наружного колеса к скорости вращения внутреннего колеса от направления и угла поворота транспортного средства. При движении транспортного средства, когда колеса становятся в одинаковых сцепных условиях, неличина отношения скоростей вращения наружного и внутреннего колес будет отклоняться от расчетной кривой в зависимости от характера неровностей и будет попадать либо в верхний диапазон отклонений отношений угловых скоростей, либо в нижний диапазон их отклонений. При этом дифференциал разблокировки и колеса расторможены, а на выходах компараторов 14 и 15 присутствуют логические О. При слабом,сцеплении наружного колеса с грунтом отношение скоростей вращения наружного и внутреннего колес начинает возрастать. В момент превышения- этим соотношением верхнего граничного значения верхнего диапазона отклонений отношений угловых скоростей колес (отношение скоростей вращения колес /oJgHijTp в этом случае будет находиться в зоне блокировки 17) компаратор 14 срабатывает и подает сигнал на логический элемент ИЛИ 18. Последний воздействует на электромагнитный клапан 19, который сообщает магистраль 20 с источником 21 давления, в результате чего рабочий агент поступает в силовой цилиндр 22, шток которого воздействует на фрикционную муфту 23. При этом начинает увеличиваться момент трения.фрикционной муфты 23 блокировки дифференциала 24 заднего моста до тех пор, пока отношение WHQ,,, ,. не попадет в верхний диапазон отклонений отношений угловых скоростей колес. В момент времени, когда отношение попадает в верхний диапазон отклонений, на выходе компаратора 14 появится логический О, который поступит на логический элемент 18, а последний снимет воздействие на электромагнитный клапан 19, который, н свою очередь, разъединит магистpajib 20 с источником 21 давления. Так регулируют момент трения фрикционной муфты 23 в зависимости от сцепления колес с грунтом. При слабом сцеплении внутреннего колеса транспортного средства, движущегося с углом поворота, не пре7 вышающего граничного значения угла поворота ipt. пор (фиг. 2). Отношение Kftp/ BHVTp Начинает уменьшаться и попадает в зону блокировки 25 дифференциала 24, при этом отношение С нор / ftHUTb становится меньше нижнего диапазона отклонений и компаратор 15 срабатывает и подает логическую 1 на выход логического эле1 ента И 26, на другой вход которого подается логическая 1 с компаратора 13 (последний определяет угловой диапазон зоны 25 блокировки дифференциала). Логический элемент И 26 воздействует на логический элемент ИЛИ 18, который, в свою очередь, управляет электромагнитным клапаном 19 и в конечном итоге начнет увеличивать момент трения фрикционной муфты 23. Отношение WHOP /w&HfT начинает увеличиваться, а следовательно увеличивается величина сигнала на выходе аналогового делителя 6, соответствующая этоМу отношению, и в момент времени, когда эта превысит нижний пороговый уровень, определяющий нижнее граничное значение нижнего диапазона отклонений отношений, воздействие на фрикционную муфту 23 прекратится. При слабом сцеплении внутреннего колеса транспортного средства с грунтом и при движении с углом поворота, превышающим граничное значение угла поворота ( пор (фиг. 2), отно.шениеЫнор /oifentjip начинает уменьшаться, при этом блокирование диффе- ренциала также уменьшает отношение скоростей вращения колес и стремит его к единице. В данном случае блокирование дифференциала привело бы к повьш1ению тяговых качеств транспор ного средства но при этом резко УХУД шило бы его поворачиваемость из-за увеличения силы тяги на внутреннем колесе, уменьшения на наружном и появления в плоскости дороги соответствукнцего этому моменту сопротивления повороту. Поэтому дифференци.ал не блокируют, а тормозят внутреннее колесо, ул5гчшая поворачиваемость и сохраняя силу тяги. В данном уст128 ройстве слабом сцеплении внутреннего колеса с грунтом отношение нnp/ начинает уменьшаться и попадает в зону, соответствующую диапазону подтормаживания внутреннего колеса, т.е. либо в зону 27 при правом повороте, либо в зону 28 при левом повороте (фиг. 2). Сигнал, соответствующий WHQ|) становится меньше нижнего порогового уровня, компаратор 15 срабатывает и передает воздействие на логический элемент И 26 и на логический элемент НЕ 29. При этом на тором входе элемента 26 будет присутствовать логический О, поступающий с компаратора 13, на выходе элемента 26 также будет присутствовать логический О. В итоге на электромагнитный клапан 19 не передается воздействие и последний не соединяет магистраль 20 с источником давления 21. Таким образом, сигнал С выхода элемента 15 поступает на элемент НЕ 29, на втором входе которого присутствует логическая 1, а сигнал с выхода элемента 29 поступает на элементы 4 и 5. В случае слабого сцепления внутреннего колеса с грунтом при правом повороте транспортного средства ( ) на выходе элемента 5 будет присутствовать логическая 1, а на выходе элемента 4 - логический О. При этом сигнал, соответствующий логической 1, воздействует на электромагнитный клапан 30, а тот, в свою очередь, соединяет магистраль 31 с источником давления 21. Рабочий агент поступает в силовой цилиндр 32, который приводит в действие тормозной механизм 33 правого ведущего колеса 10. При этом отношение О}но,р/(л)биугр начинает возрастать, в момен времени, когда и) попадает в нижний диапазон отклонений, воздействие на электромагнитный клапан 30 прекратится. Электромагнитный клапан 30 разъединяет магистраль 31 от источника давления 21, а силовой цилиндр отключает тормозной механизм 33 правого ведущего колеса. Соответственно при плохом сцеп,ном условии внутреннего колеса при левом повороте и при движении транспортного средства с углом поворота больше ct пор на выходе элемента 4 будет присутствовать, логическая 1, ; а на выходе элемента 5 - логичес71
кий о, Сигнал с выхода элемента 4 приведет действие электромагнитный клапан 34, который соединит источник давления 21 с магистралью 35. Рабочий агент воздействует на сило:вой цилиндр 36 и последний включит тормозной механизм 37. Отношение начнет уменьшаться и в момент времени, когда отношение попадет в нижний диапазон отклонений, электромагнитный клапан разъединяет магистраль 35 от источника давления 21. Силовой цилиндр 36 отключит тормозной механизм 37.
15928 . 8
Таким образом, данное устройство позволяет регулировать моменты трения фрикционной муфты 23 блокировки дифференциала и фрикционных эле5 ментов тормозных элементов 33 и 37. Крутящий момент передается на оба ведущих колеса пропорциональ но силам сцепления -каждого из иих с опорной поверхностью. Дан0 .ное устройство позволяет улучшить поворачиваемость транспортного средства при одновременном повышении его проходимости и экономии топлива.
О
1 .Z
/J Jg у29 Л


| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система блокировки дифференциала транспортного средства | 1986 |
|
SU1384429A1 |
| Механизм управления дифференциалом ведущего моста колесной машины | 1987 |
|
SU1523411A1 |
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1987 |
|
SU1418091A1 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1983 |
|
SU1081014A1 |
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1982 |
|
SU1079483A1 |
| Транспортное средство | 1986 |
|
SU1326489A1 |
| Гидрообъемное рулевое управление с механизмом блокировки дифференциала | 1987 |
|
SU1414668A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |

МЕХАНИЗМ -БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ВЕДУЩЕГО МОСТА КОЛЕСНОЙ МАШИНЫ, содержащий источник давления, фрикционную муфту блокировки дифференциала с управлением от силового цилиндра, связанного с электромагнитным клапаном, два тормозных устройства, датчики скоростей вращения колес ведущего моста, аналоговый делитель, соединенный с одним из компараторов, отличающийся тем, что, с целью повышения проходимости транспортного средства и экономии топлива, он снабжен датчиком поворота управляемых колес, дополнительными электромагнитными клапана-. ми и силовыми цилиндрами включения тормозных устройств, запоминающим устройством, выходы которого связаны с цифроаналоговым преобразователем, логическими элементами ИЛИ, НЕ и И и аналоговым коммутатором, через который датчики угловых скоростей соединены с аналоговым делителем, связанным своим выходом с неинвертирующим входом одного компаратора и с инвертирующим входом другого компаратора, выход которого соединен с одним входом логического элемента ИЛИ через один логический элемент И и связан с другим логическим элементом И,а выход первого компаратора соединен с другим входом логического элемента ИЛИ, при этом выход цифроаналогоi вого преобразователя связан с инвертирующим входом первого компаратора СЛ С и через потенциометр - с неинвертирующим входом второго компаратора и с инвертирующим входом третьего компаратора, который снабжен неинвертирующим входом для задания порогового уровня, причем выход третьего компаратора связан с вторым входом третьего логического элемента И и через логический элемент НЕ - с вторым входом последнего из логи.ческих элементов И, выход которого, в свою .очередь, соединен с входами первых логических элементов И. а выходы последних связаны с дополнительными электромагнитными клапанами управления дополнительными силовыми цилиндрами.
tr
(
/
О
31
20
X,
22
i| тж -Ж
/
N.
33
О
5&г/г./
r f f Y Tf
J.nop. vx
noSopom)(npaStai} поборот)
/7
ainop.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3138970, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
