Изобретение относится к судостроению, в частности к устройствам для очистки поверхности обшивки корпуса судна в доке.
Целью изобретения является уменьшение энергетических затрат и снижение уровня шума.
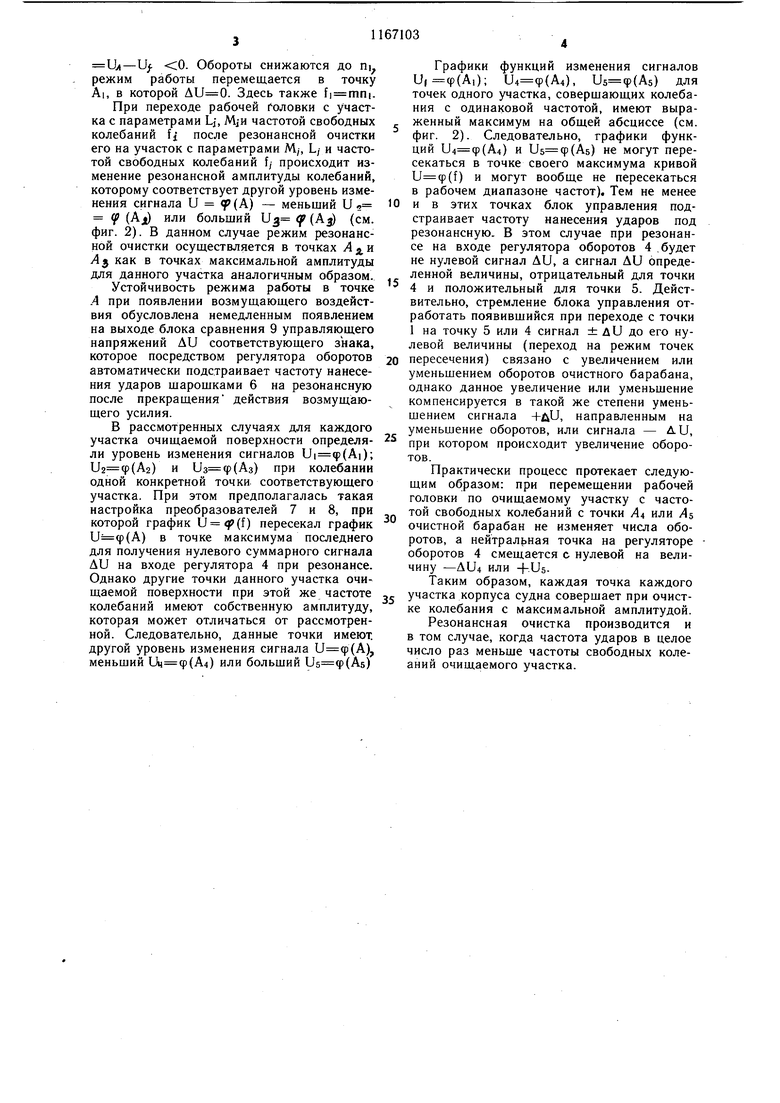
На фиг. 1 приведена принципиальная схема устройства; на фиг. 2 - графики зависимости сигналов напряжения U от частоты и амплитуды Л; на фиг. 3 - график зависимости сигнала амплитуды А от частоты f.
На обш,ей раме (не показана) смонтированы очистной барабан 1, приводной двигатель 2, измеритель частоты 3 колебаний корпуса судна, за основу которого может быть взят, например, электродинамический виброграф ВЛ-50, и регулятор оборотов 4 приводного двигателя 2. На стержнях 5 очистного барабана 1 размещены ударные элементы - шарошки 6. На той же обш,ей раме смонтирован блок управления работой регулятора, включающий два преобразователя сигналов 7 и 8, блок сравнения 9 и усилитель 10.
В общем случае определение количества стержней 5 и выбор двигателя производится с учетом того, что произведение номинального числа оборотов очистного барабана 1 на количество стержней 5 примерно равно средней частоте свободных колебаний очищаемых участков судна (либо кратно ей) для обеспечения достаточного диапазона регулирования как в сторону увеличения, так и в сторону уменьшения оборотов.
Работа устройства в общем случае осуществляются следующим образом.
Рабочий орган с работающим приводным двигателем 2 прижимают к очищаемому участку корпуса судна, при этом напряжение на управляющей обмотке регулятора оборотов 4 равно нулю, а очистной барабан 1 ударяет по упомянутому участку с частотой
{ тп,
где п - число оборотов очистного барабана; ш - количество стержней на очистном барабане.
Одновременно очищаемый участок колеблется с частотой fi свбодных колебаний, определяемой его параметрами Mi, (масса навещенных механизмов) LI (геометрические параметры) и др. Свободные колебания fi очищаемого участка измеряются измерителем частоты 3, с обмоток которого снимается синусоидальное напряжение в зависимости от скорости перемещения каретки вибрографа (У), которое подается на вход преобразователей 7 и 8. Преобразователь 7 вырабатывает напряжение в зависимости от частоты колебаний очищаемой поверхности (), а преобразователь 8 - от амплитуды колебаний U(p(A), после чего сигналы подаются на вход блока
сравнения 9. В зависимости от вел.нчнн сигналов и ф(ф) и (А) на выходе блока сравнения 9 вырабатывается суммарный сигнал - U (см. фиг. 2). Посредством сигнала (А) осуществляется выход рабочего органа на режим работы в точке А -пик резонансной кривой, или близкий к нему, учитывая погрешности измерения этот режим характеризуется совпадением частот нанесения ударов с частотой свободных колебаний (см. фиг. 3). Посредством же сигнала ({) блок управления определяет на какой ветви резонанса, восходящей или нисходящей (точке В или С), работает рабочий орган с тем, чтобы определить направление изменения числа оборотов очистного барабана для выхода в точку А. Данное обстоятельство важно, поскольку режимы работы в точках S и С характеризуются равенством амплитуд колебаний очищаемого участка (см. фиг. 3). Далее суммарный сигнал AU через усилитель 10 подается на управляющую обмотку регулятора оборотов 4, который в зависимости от величины и знака сигнала AU изменяет обороты приводного двигателя 2. В процессе очистки возможны следующие конкретные случаи соотношения частот нанесения ударов по корпусу и свободных колебаний последнего.
В случае совпадения (случайного) частоты ударов по очищаемому участку с частотой его свободных колебаний f() рабочий орган работает в точке AI, в которой амплитуда колебаний очищаемой поверхности максимальна (см. фиг. 2). В этом случае U UA-Ц: 0, на управляющую обмотку регулятора оборотов 4 не подается напряжение и очистной барабан 1 продолжает вращаться с числом оборотов п и очистка данного участка осуществляется С резонансной частотой при совпадении фаз колебаний, обусловленном общей точкой отсчета (момент первого удара по корпусу).
Если частота наносимых ударов меньще частоты свободных колебаний fi очищаемого участка, амплитуда колебаний последнего упадет и рабочая головка начнет работать в режиме точки Вь В этом случае на управляющую обмотку регулятора оборотов 4 подается напряжение AU 0, приводной двигатель 2, а следовательно, и очистной барабан 1 увеличивают обороты до величины ni, при которой режим работы рабочей головки перемещается в точку Ль в которой . В результате очистка производится с резонансной частотой . Если же частота наносимых ударов больще частоты свободных колебаний очищаемого участка fi, рабочая головка будет работать в режиме точки Сь В этом случае на управлющую обмотку регулятора 4 подается напряжение AU
. 0. Обороты снижаются до п режим работы перемещается в точку AI, в которой . Здесь также .
При переходе рабочей Головки с участка с параметрами Lj, частотой свободных колебаний fj после резонансной очистки его на участок с параметрами М/, L/ и частотой свободных колебаний f/ происходит изменение резонансной амплитуды колебаний, которому соответствует другой уровень изменения сигнала U р(А) - меньший U (f (Ajj) или больший и ер (Aj) (см. фиг. 2). В данном случае режим резонансной очистки осуществляется в точках Л д и А как в точках максимальной амплитуды для данного участка аналогичным образом.
Устойчивость режима работы в точке .4 при появлении возмуш,ающего воздействия обусловлена немедленным появлением на выходе блока сравнения 9 управляющего напряжений AU соответствующего знака, которое посредством регулятора оборотов автоматически подстраивает частоту нанесения ударов шарошками 6 на резонансную после прекращения действия возмущающего усилия.
В рассмотренных случаях для каждого участка очищаемой поверхности определяли уровень изменения сигналов Ui(p(Ai); (А2) и (Аз) при колебании одной конкретной точки соответствующего участка. При этом предполагалась такая настройка преобразователей 7 и 8, при которой график и q (f) пересекал график (А) в точке максимума последнего для получения нулевого суммарного сигнала AU на входе регулятора 4 при резонансе. Однако другие точки данного участка очищаемой поверхности при этой же частоте колебаний имеют собственную амплитуду, которая может отличаться от рассмотренной. Следовательно, данные точки имеют. другой уровень изменения сигнала (А), меньший (А4) или больщий (А5)
Графики функций изменения сигналов и, ф(А1); (А4), (А5) для точек одного участка, соверщающих колебания с одинаковой частотой, имеют выраженный максимум на общей абсциссе (см. фиг. 2). Следовательно, графики функций (А4) и (А5) не могут пересекаться в точке своего максимума кривой (Г) и могут вообще не пересекаться в рабочем диапазоне частот). Тем не менее
0 ив этих точках блок управления подстраивает частоту нанесения ударов под резонансную. В этом случае при резонансе на входе регулятора оборотов 4 .будет не нулевой сигнал AU, а сигнал Ди определенной величины, отрицательный для точки 4 и положительный для точки 5. Действительно, стремление блока управления отработать появивщийся при переходе с точки 1 на точку 5 или 4 сигнал ± ди до его нулевой величины (переход на режим точек
0 пересечения) связано с увеличением или уменьшением оборотов очистного барабана, однако данное увеличение или уменьщение компенсируется в такой же степени уменьшением сигнала +uU, направленным на уменьшение оборотов, или сигнала - AU, при котором происходит увеличение оборотов.
Практически процесс протекает следующим образом: при перемещении рабочей головки по очищаемому участку с часто.. той свободных колебаний с точки A или АЬ очистной барабан не изменяет числа оборотов, а нейтральная точка на регуляторе оборотов 4 смещается с нулевой на величину -Ди4 или .Us.
Таким образом, каждая точка каждого
J участка корпуса судна совершает при очистке колебания с максимальной амплитудой. Резонансная очистка производится и в том случае, когда частота ударов в целое число раз меньше частоты свободных колеаний очищаемого участка.
ш
BI Ai Cf Фиг.2
(f)
(3) т)
4,
A.f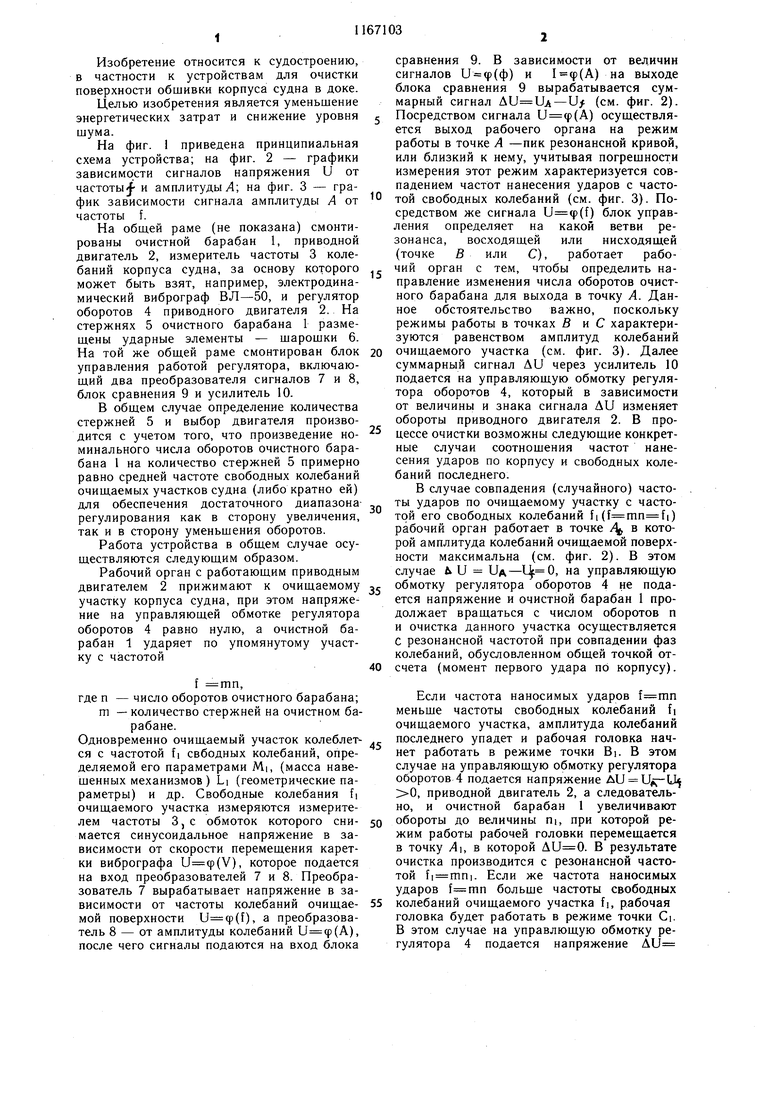
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки стенок транспортных средств от примерзшего сыпучего материала | 1989 |
|
SU1801909A1 |
| СПОСОБ ВОЛОЧЕНИЯ ПРОВОЛОКИ С ПРИМЕНЕНИЕМ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2116850C1 |
| СПОСОБ ВИБРАЦИОННОЙ ОЧИСТКИ ЛЕНТЫ КОНВЕЙЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2009087C1 |
| Вибрационный сейсмический источник | 1989 |
|
SU1728823A1 |
| Пост очистки транспортных средств на базе козлового крана | 2023 |
|
RU2797826C1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2008 |
|
RU2389447C2 |
| Устройство для автоматической настройки тока компенсации в режиме однофазного замыкания на землю в электрических сетях карьеров | 1987 |
|
SU1467663A1 |
| СПОСОБ УПРАВЛЕНИЯ ЦИКЛОМ ЦЕНТРИФУГИРОВАНИЯ В СТИРАЛЬНОЙ МАШИНЕ И СТИРАЛЬНАЯ МАШИНА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2007 |
|
RU2396384C1 |
| Способ автоматического контроля барабанной мельницы | 1987 |
|
SU1607952A1 |
УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ ОБШИВКИ КОРПУСА СУДНА В ДОКЕ, содержащее приводной двигатель, кинематически связанный с очистным барабаном со стержнями, на которых размещены рабочие элементы для приведения очищаемой обшивки в колебательное движение, отличающееся тем, что, с целью уменьшения энергетических затрат и снижения уровня щума, оно снабжено измери- телем частоты колебаний очищаемой общивки, регулятором оборотов приводного двигателя, двумя преобразователями сигналов по частоте и амплитуде и блоком сравнения, причем выходы обоих преобразователей соединены с соответствующими входами блока сравнения, вход каждого из них соединен с соответствующим выходом измерителя частоты колебаний, а выход блока сравнения соединен с входом регулятора оборотов приводного двигателя. (Л ffi Ml
| Очистной орган ударного типа устройствадля ОчиСТКи МЕТАлличЕСКиХ пОВЕРХНОСТЕй | 1978 |
|
SU844469A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
