J Изобретение относится к автома-тиэнрованному электроприводу и может использоваться для управления технологическими процессами. Известна система автоматического управления, вьтолненная по принципу подчиненного регулирования параметров исполнительного электродвигателя 1 . Системы подобного типа выполняют ся на базе последовательно включенных регуляторов, каяадый из которых осуществляет регулирование определе ного параметра объекта управления. Регуляторы реализуются на основе линейных интегральных операционных усилителей с непосредственной межка кадной связью. Однако известная система имеет низкую надежность из-за недостаточно высокой помехоустойчивости линей ных операционных усилителей. Наиболее близкой к предлагаемой является система, состоящая из последовательно включенных регуляторов, выполненных на основе развертывающих операционных усилителей. Развертывающие усилители представляют собой автоколебательную систему с частотно-широтно-импульсной модуляцией, реализованную на базе последовательно включенных сумматора, интегратора и релейного элемента с симметричными относитель но нулевого уровня порогами переключения и неинвертирующей петлей гистерезиса. При этом выход релейного элемента является выходом усилителя и соединен с первым входом сумматора, второй вход которого сое динен с источником сигнала управления . Известная система содержит также демодуляторы, входы которых подключены к выходу интегратора соответствующего усилителя, а выходы соединены с входом логического элемента И, выход которого подключен к управляющему входу ключевого элемента, включенного между выходом системы и входом исполнительного ме ханизма 2 В известной системе используются развертывающие усилители с двухтактной частотно-широтно-импульсной модуляцией, когда выходной сигнал представляет собой биполярные импульсы без интервалов паузы меж782ду моментами времени формирования импульсов положительно и отрицательной полярности. Данный фактор является ограничением на пути повьшения мощности вьпсодного сигнала развертывающего усилителя, так как с ростом мощности усилителя при достаточно высокой частрте его автоколебаний (10 - 10 Гц) через выходной каскад развертывающего усилителя начинают протекать сквозные токи короткого замыкания, что влечет за собой ухудшение энергетических показателей САУ, а в ряде сл чаев может привести к выходу из строя усилителей и системы управления в целом. Таким образом, известная САУ имеет низкую надежность. С другой стороны, повьппение мощности выходного информативного сигнала РОУ необходимо с позиций улучшения помехозащищенности системы, так как в этом случае регуляторы системы управления могут выполняться с применением низкоомных сопротивлений на входе и в. цепи обратной связи. В результате относительный уровень мощности сигнала помехи снижается, что вызывает повьщ1ение помехозащищенности отдельных регуляторов и системы управления в целом. Целью изобретения является повышение надежности и помехозащищенности системы управления. Поставленная цель достигается тем, что в систему, содержащую датчик скорости исполнительного механизма , последовательно включенные задатчик интенсивности, первый сумматор, первый интегратор, первый релейньй элемент, выход которого подключен к второму входу первого сумматора, последовательно включенные первый ключевой элемент с зоной нечувствительности, первый демодулирующий фильтр, второй сумматор, второй интегратор, второй релейный элемент выход которого подключен к второму входу второго .сумматора, последовательно включенные второй ключевой элемент с зоной нечувствительности, второй де-; модулирующий 4мльтр, вентильный преобраэователь, исполнительный механизм, датчик тока исполнительного механизма, выход которого соединен с третьим входом второго / сумматора, выход датчика скорости
3
исполнительного механизма подключен к третьему входу первого сумматора, введены третий и четвертый сумматоры, третий и четвертый релейные элементы, выход первого интегратора через третий релейньй элемент подключен к первому входу третьего сумматора, второй вход которого соединен с выходом первого релейного элемента, а выход - с входом первого ключевого элемента, с зоной нечувствительности, выход второго интегратора через четвертый релейный элемент соединен с первым входом четвертого сумматора, второй вход которого подключен к выходу второго релейного элемента, а выход - К входу второго ключевого элемента с зоной нечувствительности.
На чертеже схематически представлена предлагаемая система.
В состав системы входят первый 1 второй 3, третий 2, четвертый 4 сумматоры, первый 5 и второй 6 интеграторы, первый 7, второй 9, третий 8 и четвертый 10 релейные элементы, задатчик интенсивности 11, первый 12 и.второй 13 ключевые элементы с зоной нечувствительности, первьй 14 и второй 15 демодулируищие фильтры, вентильн1 преобразователь 16, исполнительный механизм 17, датчик тока 18 и датчик скорости t9.
Система работает следующим образом.
Задатчик интенсивности 11 определяет темп разгона и торможения исполнительного механизма 17.
Регулятор скорости, формирующий сигнал задания для регулятора тока и регулятор тока исполнительного механизма 17 выполнены на основе развертьтающих операционных усилителей, каждый из которых включает в себя звенья (1, 5, 7, 8, 2, 12) и (3, 6, 9, 10, 4, 13).
Фильтры 14 и 15 предназначены для выделения постоянной составляющей выходного сигнала развертывающего операционного усилителя.
Развертывающие операционные усилители cиcтe в l, в частности усилители на базе звеньев 1, 5, 7, В 2, 12 работают следующим образом.
Сумматор t, интегратор 5 и релейный элемент 7 в совокупности образуют автоколебательный каскап с 67578 ,.4
частотно-широтно-импульсной модуляцией.
Релейный элемент 7 имеет симметричные относительно нуля САУ пороги переключения +Ъ и нейнвертирующую петлю гистерезиса.
При отсутствии сигнала управления среднее значение выходных импульсов блока 7 равно кулю. ВЫТО ходной сигнал интегратора 5 имеет форму симметричной пилы, амплитуда которой ограничена величиной порогов переключения релейного элемента 7.
15 Наличие сигнала управления на одном из входов сумматора 1 вызывает измене.ние скважности выходныу импульсов релейного блока 7. В один из полупернодов автокрлеба20 НИИ темп изменения выходного сигнала интегратора 5 определяется разностью сигналов на входе сумматора 1 и выходе релейного элемента 7, а в другой полупериод ав5 тлколебаний - зависит от суммы этих сигналов. В результате постояйная составляющая вьосодных импульсов устанавливается пропорциональной величине сигнала управления.
Релейшэй элемент 8 имеет также симметричные относительно нуля САУ пороги переключения +В и неинвертирующую петлю гистерезиса, причем IB,J. Блок 8, как и релейн) элемент 7, управляется выходньт сигналом интегратора 5. Это вызывает формирование на выходе ре лейного элемента 8 импульсов, которые сдвинуты по фазе относительно вькодного сигнала релейного элемента 7.
С помощью звена 2 осуществляется суммирование выходных импульсов релейных элементов 7 и 8.
Ключевой элемент 12 является релейным элементом с зоной нечувствительности ±С.
о- ,
0 В интервале времени несовпадения знаков выходных импульсов релейных элементов 7 и 8 выходной сигнал сумматора 2 равен нулю, что обеспечивает нулевой уровень cw5 нала на выходе ключевого элемента 12.
Принцип действия развертьшаищего операционного усилителя, включающего звенья 3, 6, 9, 10, 4, 13, аналогичен рассмотренному.
Таким образом/ введение в систе му звеньев 2, 4, 8, 10 обеспечивает формирование интервала паузы, между моментами времени изменения знака импульсов на выходе развертывающего усилителя. При этом повышается надежность регуляторов и системы управления в целсм, так как исключается возможность протекания через выходные каскады звеньев 12, 13 (. 1) сквозтах токов короткого замыкания, которые возникают при изменении знака выходных импульсов развертывающих операционных усилителей.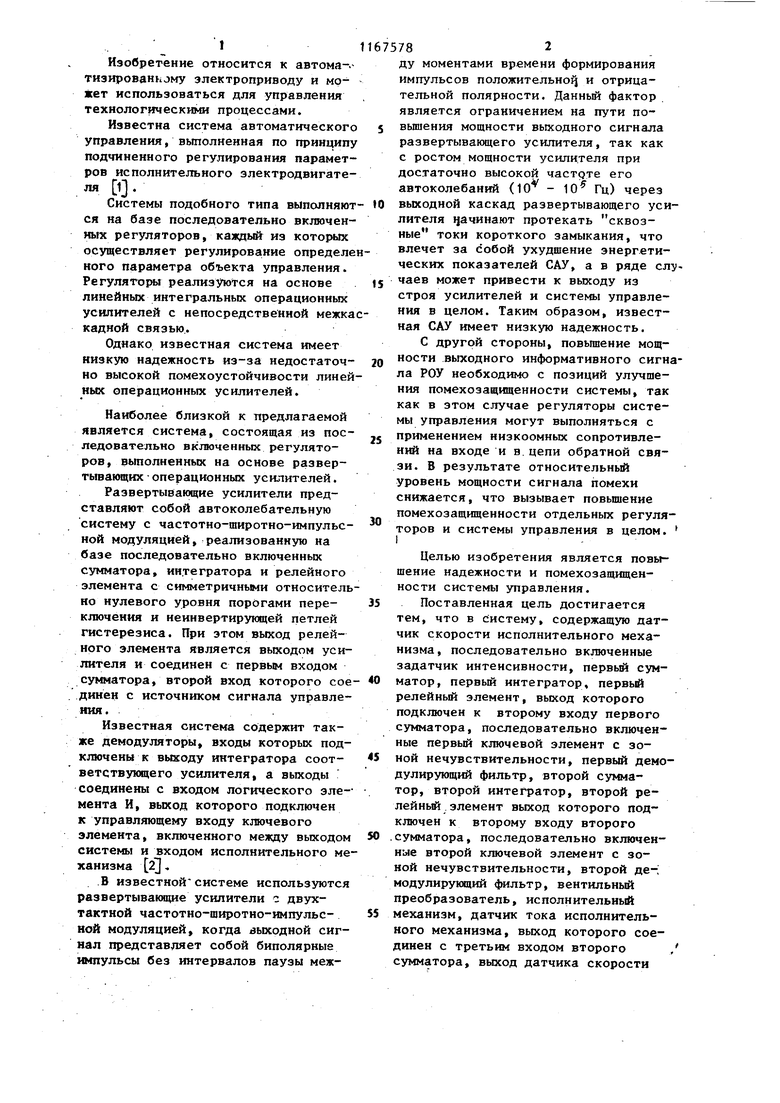

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| Развертывающий операционный усилитель | 1983 |
|
SU1091178A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Импульсный регулятор | 1984 |
|
SU1251025A1 |
| Система управления | 1979 |
|
SU842722A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2006 |
|
RU2312452C1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
| МНОГОЗОННЫЙ ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2009 |
|
RU2408969C1 |
| Развертывающий операционный усилитель | 1983 |
|
SU1166142A1 |
СИСТЕМА УПРАВЛЕНИЯ, содержацая датчик скорости исполнительного механизмау последовательно включенные эадатчик интенсивности, п&рвыА сумматор, первый интегратор, первый релейнь элемент, выход которого подключен к второму входу перво го сумматора, последовательно включенные первь ключевой элемент с зоной нечувствительности, первый демодул1фуюций фильтр, второй сумматор, второй интегратор, второй релейный элемент, выход которого подключен к второму входу второго .сумматора, последовательно включенные второй ключевой элемент с зо ной нечувствительности, второй демодулируюций фильтр, вентйльный преобразователь, исполнительный механизм, датчик тока исполнительного механизма, выход которого соединён с третьим входсм второго сумматора, выход датчика скорости -исполнитель- ного механизма подключен к третьему входу первого сумматора, отличающаяся тем, что, с целью повышения надежности и помехозаф - щенности системы управления, в нес. введены третий и четвертый cy№faторы, третий и четвертый релейные элементы, выход первого интегратора через третий релейный элемент подключен к первому входу третьего сумматора, второй вход которого сое-, динен с выходсм первого релейного элемента, а .выход - с входом первого ключевого элемента с зоной нечувствительности, выход второго I интегратора через четверть релей93 н элемент соединен с первьм ,дом четвертого сумматора, второй ел вход которого подключен к выходу второго релейного элемента а выг СХ) ход - к входу второго ключевого элемента с зоной нечувствительности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Горнов В.К | |||
| и др | |||
| Унифицированные системы автоуправления электроприводом в металлургии | |||
| М., Металлургия, 1971, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления | 1979 |
|
SU842722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
