(54}СИСТЕМА УПРАВЛЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1983 |
|
SU1167578A1 |
| Система автоматического управления | 1984 |
|
SU1249490A1 |
| Система автоматического управления | 1980 |
|
SU1008697A1 |
| Система управления | 1984 |
|
SU1211688A1 |
| Система подчиненного регулирования | 1984 |
|
SU1238024A1 |
| Система управления | 1984 |
|
SU1242909A1 |
| Развертывающий автоколебательный операционный усилитель | 1980 |
|
SU862149A1 |
| Развертывающий преобразователь | 1987 |
|
SU1451729A1 |
| Развертывающий операционный усилитель | 1983 |
|
SU1091178A1 |
| Развертывающий операционный усилитель | 1985 |
|
SU1260975A1 |

1
Изобретение относится к автоматизированному электроприводу и предназначено для автоматизации технологических процессов.
Известны системы автоматического управления (САУ), выполненные по принципу подчиненного регулирования параметров 1 и 2vСистемы такого типа как известно, выполняются на базе последовательно включённых регуляторов, каждый из которых осуществчяет регулирование определенным паранетромскоростью, током двигателя и т.д. plj
.. ...
Основу регуляторов САУ составляет операционные усилители (ОУ}, как правило, интегрального исполнения с непосредственной связью между каскадами. При неработоспособности ОУ его выходной сигнал принимает максимальное значение.определяемое напряжением источника питания системы управления. С точки зрения надежности это придает известным САУ существенный tieдостаток, заключающийся в том, что рыход из строя ОУ влечет за собой срабатывание силовой защитной аппаратуры. Последнее обстоятельство нежеЛс1тельно с позиций- безопасности обслуживающего персонала итехнологического процесса.
Очевидно,что наиболее приемлеMbiM путем повьшения надежности САУ было бы выполнение ее регуляторов на основе ОУ, которые при неработоспособности отдельных каскадов обеспечивгШй бы нулевой уровень выходного С1|;гнала, соотвествующего контура регулирования. Вторым вариантом решения поставленной задачи можно считать применение устройств диагностики неисправности ОУ, с помощью которых осуществлялось бы отключение выхода электронной части САУ от входа силового преобразователя.
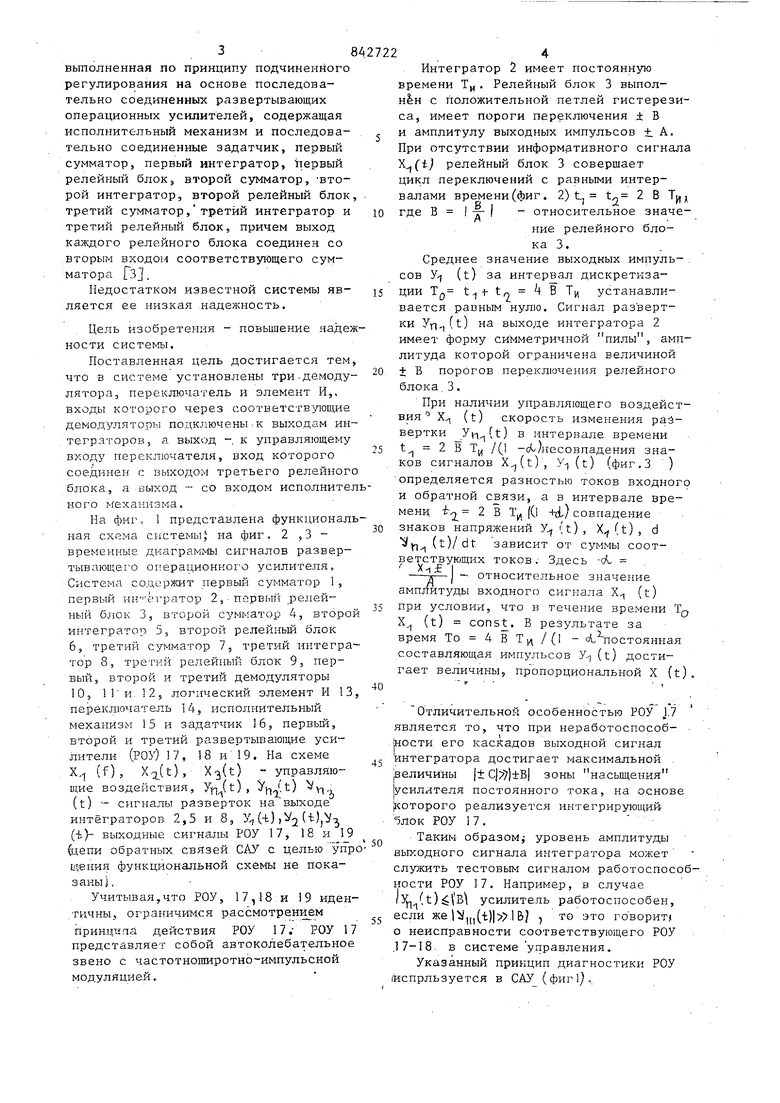
Наиболее близкой по технической сущности к предлагаемой является система автоматического регулирования. .3 вьтолненная по принципу подчиненного регулирования на основе последовательно соединенных развертывающих операционных усилителей, содержащая исполнительный механизм и последовательно соединенные задатчик, первый сумматор, первый интегратор, первый релейный блок, второй сумматор, -второй интегратор, второй релейный блок третий сумматор,третий интегратор и третий релейный блок, причем выход каждого релейного блока соединен со вторым входом соответствующего сумматора Гз J. Недостатком известной системы является ее низкая .надежность. Цель изобретения - повышение наде ности системы. Поставленная цель достигается тем что в системе установлены три-демоду лятора, переключатель и элемент И,. входы которого через соответствующие демодуляторы подключены-к выходам ин теграторов, а выход -. к управляющему входу переключателя, вход которого соединен с выходом третьего релейног блока, а .выход - со входом исполните ного механизма. На фиг, 1 представлена функционал ная схема системы} на фиг. 2 ,3 временные, диаграммы сигналов развертывающего операцио нного усилителя. Система содержит первый сумматор 1, первый интегратор 2, первый релейный блок 3, второй сумматор 4, второ интегратор 5, второй релейный блок 6, третий сумматор 7, третий интегра тор 8, третий релейный блок 9, первый, второй и третий демодуляторы 10, 11и. 12, логический элемент И 13 переключатель 14, исполнительный механизм 15 и задатчик 16, первый, второй и третий развертывающие усилители (РОУ) 17,18 и 19. На схеме Х, (f), X(t), X3(t) - управляющие воздействия, ), Vn(t) Vv,,j (t) - сигналы разверток на выходе интеграторов 2,5 и 8, X, (-t), V2 (t),V (i)- выходные сигналы РОУ 17, 18 и 19 епн обратных связей САУ с целью упр ;:™ щения функциональной схемы не показаны),: Учитывая,что РОУ, 17,18;И 19 иден тичны, ограничимся рассмотрением принципа действия РОУ 17.- РОУ 1 представляет собой автоколебательное звено с частотноширотно-импульсной модуляцией. Интегратор 2 имеет постоянную времени Т. Релейный блок 3 выполнен с положительной петлей гистерези са, имеет пороги переключения ± В и амплитулу выходных импульсов + А. При отсутствии информативного сигнала релейный блок 3 совершает цикл переключений с равными интервалами времени (фиг. 2) t, Ц 2 BTj где В I - I - относительное значение релейного блока 3. Среднее значение выходных импуль- . сов У-( (t) за интервал дискретизации T|j trt А В TH устанавливается равным нулю. Сигнал развертки ,, (t) на выходе интегратора 2 имеет форму симметричной пилы, амплитуда которой ограничена величиной ± В порогов переключения релейного блока.3. При наличии управляющего воздействия Х (t) скорость изменения paSвертки .yH-,(t) в интервале времени : t 2 В Т /( -с //несовпадения знаков сигналов X(t), У-) (t) (фиг.З ) определяется разностью токов входного и обратной связи, а в интервале временц 2 2 В -txi) совпадение : знаков напряжений У (t), Х(t), d tl,(t)/dt. зависит от суммы соответствующих токов,- Здесь -0 X ± I --Tj-|- относительное значение штуды входного сигнала Х-, (t) амшшту при условии, что в течение времени Т, X, (t) cons. в результате за время То 4 В Tj, /(1 - 1 1остоянная составляющая импульсов У-j (t) достигает величины, прЪпорциональной X (t). Отличительной особенностью РОУ 1.7 вляется то, что при неработоспособ- ости его каскадов выходной сигнал нтегратора достигает максимальной . еличины j.±C| 7l±B| зоны насыщения силителя постоянного тока, на основе оторого реализуется интегрирующий лок РОУ 17. Таким образом,- уровень амплитуды ыходного сигнала интегратора может лужить тестовым сигналом работоспособости РОУ 17. Например, в случае (t)iB усилитель работоспособен, сли жe|,„(t) , то это говорит неисправности соответствующего РОУ 7-18 в системеуправления. Указанный принцип диагностики РОУ спрльзуется в САЗ(фиг1), Демодуляторы (выпрямители) 10-- 2 имеют зону нечувствительности ±, которая удовлетворяет условию , |±C-l |i(. в работоспособной схеме САУ выходные сигналы звеньев 10-12 paisHbi нулю переключатель 14 находится в исходном замкнутом состоянии. При выходе из строя любого из усилителей РОУ .17-19, амплитуда соответствующей развёртки У (t) JfjJjt), .Xj(t) достигает величины большей, чем(S и на выходе одного из блоков 10-12 появляется сигнал, соответствующий логической 1. Этоприводит к появлению на вьрсоде элемента И 13 импульса,-под воздействием которого переклю чатель 14 размыкается, отключая выход неисправной САУ от входа силового преобразователя 15. Таким образом, уменьшается вероятность срабатывания силовой защитной аппаратуры и повышается надежность САУ. Формула изобретения Система управления, содержащая исполнительный механизм и последовательно соединенные задатчик, первый сзт матор, первый интегратор, первый -релейный блок, второй сумматор, второй.интегратор, второй релейный блок, третий сумматор, третий интегратор, третий релейный блок, -причем выход каждого релейного блока соединен со вторым входом соответствующего сумма- тора, отл.ичающаяся тем, что, с целью повьшения надежности системы, в ней установлены три демодулятора, переключатель и элемент И, входы которого через соответствующие демодуляторы подключены к выходам интеграторов , а выход - к управляющему входу переключателя, вход которого соединен с выходом третьего релейного. блока, а выход - со входом исполнитешьного механизма,, Источники информации, принятые во внимание при экспертизе 1. Решмин Б. И., Ямпольский Д. С. Проектирование и наладка систем подчиненного регулирования электроприт водов, М., Энергия, 1975, с.183. 2.Рабинович В. Б. и др. Наладка систем регулирования.электроприводов на унифицированных блоках. Л., ДЦНТП, 1975, С.27.: „ 3.Гарнов В. К. и ;Цр. Унифицированные системы автоуправления электроприводом в металлургии.М., Металлур гия, 1977, с.114, рис. 52 (прототип).
