Изобретение относится к станкам и приспособлениям для обработки криволинейных поверхностей без применения копиров, в которых получение заданной кривой осуществляется путем воспроизведения функциональной зависимости составляющих координатных движений рабочего органа с заменой отдельных сопрягаемых участков сложной кривой отрезками какой-либо однотипной кривой простого вида.
В существующих устройствах такого рода процесс функционального воспроизводства заданной кривой обычно осуществляется на осноье использования сложных счетно-решающих систем программного управления.
В отличие от них в предлагаемом устройстве воспроизводство составляющих функциональных движений рабочего органа осуществляется в условиях замены участков заданной кривой дугами окружности переменной кривизны посредством вариаторов скоростей, управляемых кулачками постоянного профиля, вращающихся с переменной скоростью, задаваемой от путевых барабанных контакторов.
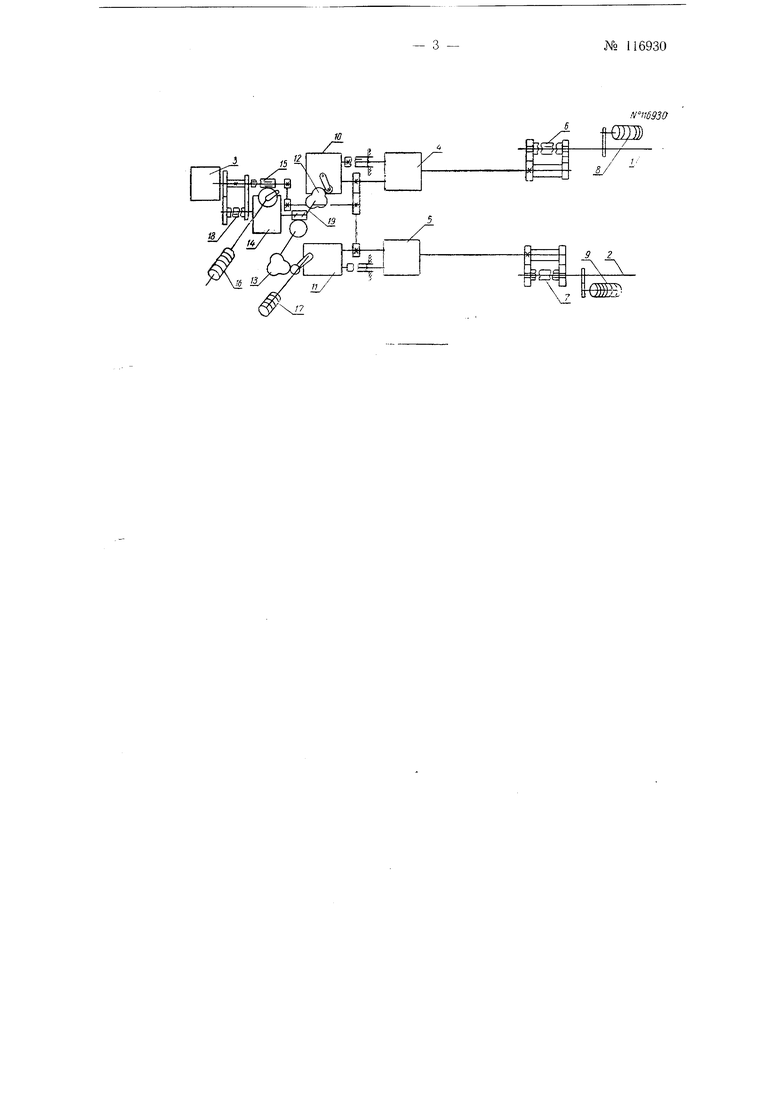
На чертеже изображена принципиальная схема устройства для автоматического управления, например, токарным станком, при бескопирной обработке криволинейных поверхностей.
Движение на валик 1 продольной подачи и валик 2 поперечной нодачи передается от электродвигателя 5 через дифференциалы - и 5 и муфты 5 и 7 с электромагнитным управлением. Валики подач кинематически связаны с электрическими путевыми контакторами S и 9, обеспечивающими включение и выключение соответствующих подач с помощью электромагнитных муфт 6 vi7.
Изменение скоростей поперечной и продольной подач .суппорта станка в соответствии с характером обрабатывающейся кривой осуществляется посредством вариаторов 10 и //, передающих дополнительное двиАО 116930
жение на дифференциалы 4 л 5. Эти вариаторы управляются вращающимися кулачками 12 и 13, имеющими постоянный расчетный профиль. Для того, чтобы обеспечить переменную кривизну дуг окружности, воспроизводящих участки заданной кривой при постоянных профилях кулачков, скорость вращения последних изменяется с помощью вариатора /4, приводимого в движение через муфту 15. Муфта 75 в свою очередь управляется от путевого контактора 16, кинематически связанного с механизмом вариатора 14. С механизмом же вариатора 11 кинематически связан путевой контактор 17, управляющий муфтой 18 включения призодной цепи вращения кулачков 12 и 13 (через вариатор 14 и червячную пару 19).
Предмет изобретения
1. Устройство для автоматического управления металлорежущими станками при бескопирной обработке криволинейных поверхностей посредством воспроизведения функциональной зависимости составляющих координатных движений рабочего органа станка в условиях замены участков заданной кривой отрезками правильной кривой постоянного закона, отличающееся тем, что, с целью упрощения системы унравления станком и обеспечения возможности получения заданных криволинейных поверхностей без применения предварительных программных записей, в кинематические цепи координатных движений рабочего органа станка включены вариаторы скоростей, управляемые постоянными кулачками, профили которых обеспечивают воспроизводство участков заданной кривой в виде сопрягаемых дуг окружности переменного, соответствующего заданной скорости вращения кулачков, радиуса.
2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения радиуса кривой, соответствующего заданной скорости вращения кулачков, в приводную цепь вращения кулачков включен дополнительный автоматически управляемый вариатор.
3.Устройство по пп. 1, 2, отличающееся тем, что, с целью автоматического управления движениями рабочего органа станка путем вращения кулачков и вариаторов, оно снабжено путевыми барабанными электрическими контакторами, включенными в кинематические цепи станка и устройства, воздействующие на электромагнитные муфты включения механизмов станка и устройства
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бескопирной автоматической обработки на металлорежущих станках криволинейных поверхностей | 1959 |
|
SU130767A1 |
| Механизм подачи исполнительного органа машины-орудия | 1947 |
|
SU71782A1 |
| Устройство для автоматического управления работой суппортов токарных станков и других исполнительных органов машин-орудий | 1950 |
|
SU101203A2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2007323C1 |
| Устройство для автоматизации исполнительного орган станка | 1948 |
|
SU86477A1 |
| Металлорежущий станок | 1974 |
|
SU519315A1 |
| Устройство для автоматического управления работой суппортов токарных станков | 1947 |
|
SU90410A1 |
| Способ автоматизации работы исполнительных органов машин-орудий | 1947 |
|
SU74955A1 |
| Хонинговально-доводочный станок | 1987 |
|
SU1509235A1 |
| Электронная фотогравировальная машина | 1958 |
|
SU119811A1 |