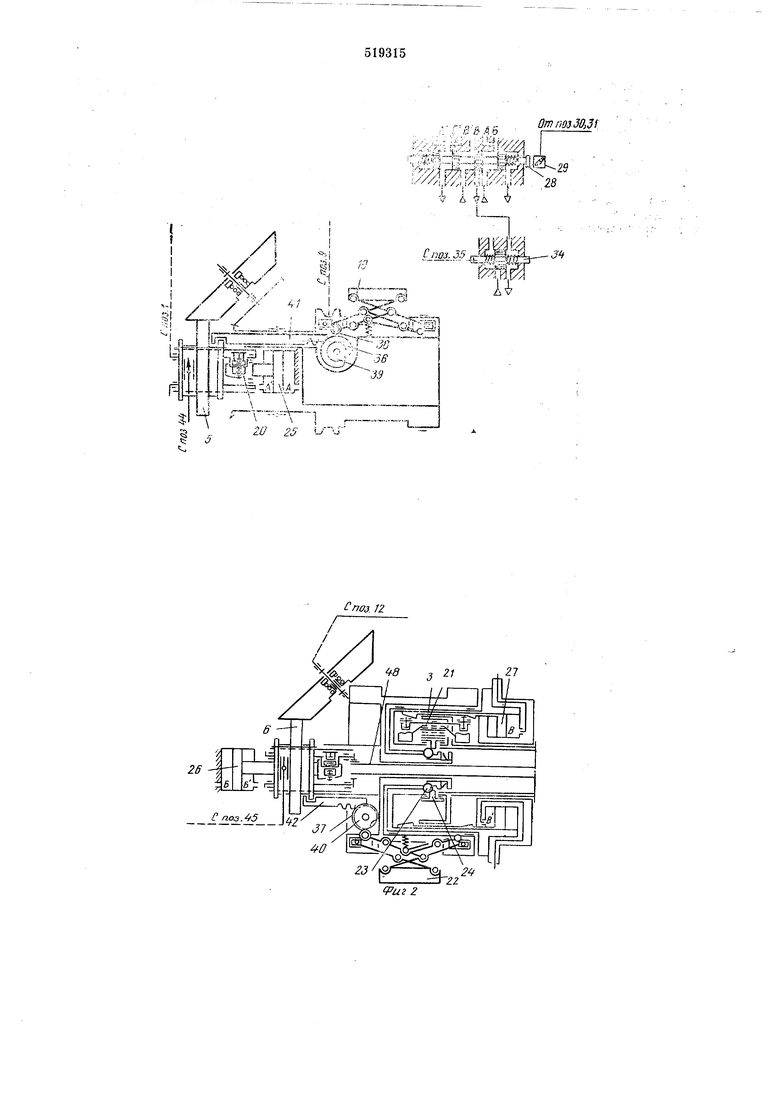
Технико-ЗКономические преимущества станка следующие: сокращается вспомогательное время на выполнение приемов зажима-разжима в 5-7 раз, увеличивается производительность труда в 1,4-1,6 раза; исключаются действия рабочего, иаправлепиые на зажимразжим заготовки; возможна а-втоматическая регзлировка усилий зажима-разжима; при использовании меха«из1ма регулировки усилий зажима-разжима повышается качество обработки за счет повышения стабильности размеров; станок легко может быть переведен на полиостью автоматическое или программное управление, а также встроен в автоматическую линию при сохранении его универсальности. На фиг. 1 показан станок; на фиг. 2 - механизм регулировки; на фиг. 3 - управление путевыми выключателями; на фиг. 4 - блокировка управления усилиями и скоростями. В металлорежущем станке приводной вал 1 коробки скоростей с помощью муфты 2 соединяется с одной стороны со щпииделем 3 через кинематические связи коробки скоростей, а с другой стороны-с центрирзющим звеном 4 зажимного патрона. Кинематическая связь приводного вала i со звеном 4 включает два дисковых вариатора скоростей 5 и 6 и дифференциальную передачу. Последняя состоит из одноступенчатого дифференциала с внутренним и наружным зацеплениями и двустуленчатого дифференциала с двумя зацеплениями. Наружное центральное колесо 7 одноступенчатого дифференциала несет на себе маховик 8 и его водило 9 жестко связано с подвижным диском тормозного устройства 10 и первым центральным колесом 11 двустуленчатого дифференциала, а через вариатор скоростей 5 водило 9 кинематически связано с приводным валом 1. Второе центральное колесо 12 двуступенчатого дифференциала через вариатор скоростей 6 кинематически связано с центрирующим звеном, а его водило 13 жестко связано с внутренним центральным колесом 14 одноступенчатого дифференциала. Управление тормозным устройством 10 сблокировано с управлением пуска и торможения главного движения через цепь управления: золотник 15 - электромагнит 16 - конечный выключатель 17 - рукоятка 18 пуска и торможения главного движения, кинематически связанная с муфтой 2. Инерционные звенья 19, вырезанные из полого цилиндра, в точках, перемещающихся перпендикулярно к оси вращения, соединены шарнирно с щатунами сдвоенных кривошипно-ползунных прямолинейно-направляющих механизмов. Одна из центробежных муфт 20 взаимодействует с приводом главного движения и вариатором скоростей 5, а другая муфта 21 - с |вариатором скоростей 6 и центрирующим звеном патрона. Инерционные звенья 22 располагаются соосно СО щпинделем на заднем его конце и приводятся от шпинделя через щариковый дифференциал 23. Нриводное звено 24 этого дифференциала взаимодействует со шпинделем через центробежную муфту 21. Инерционные звенья 22 выполнены аналогично звеньям 19 и аналогично соединены с такими же кривощипно-ползунными механизмами. Соосно с центробежными муфтами 20 и 21 устанавливаются пневмоцилиндры 25, 26, 27, на конические поверхности штоков которых опираются ролики центробежных муфт. Управление пневмоцилиндрами осуществляется либо автоматически ,в моменты подводаотвода поперечного или продольного суппортов, либо вручцую. Для этого введена цепь управления, которая состоит из золотника 28, электромагнита 29, путевых переключателей 30 и 31 и управляемых упоров 32 и 33. Введена также дополнительная цепь управления иневмоцилиндром 27, состоящая из золотника 34 и кулачка 35, связанного с системой управления коробкой скоростей. Путевые переключатели 30 и 31 перемещаются и фиксируются в нужном положении на направляющих. С ними взаимодействуют упоры 32 и 33, встроенные в поперечный и продольный суппорты и находящиеся между собой в постоянной кинематической связи как рейка и вал-шестерня. При этом обеспечена такая взаимосвязь деталей, что если один из упоров находится в рабочем положении. то другой в нерабочем, а если один из них в нейтральном положении, то и другой в нейтральном. Это обеспечивает возможность как автоматического, так и ручного управления. С целью автоматической установки оптимальных усилий зажима-разжима при смене режимов обработки, управление вариаторами скоростей сблокировано с управлением коробкой скоростей. Зто осуществляется следующим образом. Дисковые кулачки 36 и 37 профилируются в зависимости от необходимого положения центра тяжести инерционных звеньев 19 и 22. На поверхности этих кулачков онираются подпрул ;иненные ролики 38, принадлежащие кривошипам сдвоенных кривощипно-ползунных прямолинейно-направляющих механизмов. С кулачками 36 и 37 жестко связаны зубчатые колеса 39 и 40 соответственно, в кинематическом сопряжении с которыми находятся рейки 41 и 42. Рейки перемещаются в направляющих и снабжены на концах пазом, с помощью которого они подвияшо сопрягаются с бзфтиками цилиндрических дисков вариаторов 5 и 6. Управление положением цилиндрических дисков и подвижными блоками зубчатых колес 43 коробки скоростей осуществляются через подвижно сопряженные с ними рычаги с помощью цилиндрических кулачков 44, 45, 46, находящихся между собою кинематической связи. Управление кулачками осуществляется с помощью штурвала 47. Для ручиого управления кулачками патрона на момент базирования детали в кулачках или установки их на новый размер в планшайбе патрона смонтирована двусторонняя муфта свободного хода. Ее наружная обойма жестко связана с валом 48, внутренняя - находится в кинематической связи с центрируюЩИМ звеном 4 патрона, а поводковая вилка - в кинематической связи с поворотным диском 49, смонтированным подвижно «а наружной поверхнОСти планшайбы 50. Это обеспечивает передачу движения как от наружной обоймы к внутренней, так и от внутренней к наруж- 15 ной. При повороте диска 49 поводковая вилка выталкивает ролики одной группы, давит на внутреннюю обойму и расклинивает ролики другой группы, исключая передачу движения на наружную обойму. Внутренняя же обойма, увлекаясь поводковой вилкой, передает движение на центрирующее звено 4 зажимного патрона. Станок работает следующим образом. В выключенном состоянии станка рукоятка 25 18, управляющая муфтой 2, находится в положении, -показанном щтрих-пунктирной линией на фиг. 1. При этом «улачок рукоятки замыкает конта .-ы конечного выключателя 17, муфта 2 занимает нейтральное положение, т. е. при включении двигателя передача движения не происходит. При нажатии кнопки «Пуск включается электродвигатель и движение от него передается через шкивы «а вал 1. Одновременно получает питание 35 элбктромагнит 16, золотник 15 переместится вправо и диск тормозного устройства 10, а жестко связанные с ним водило 9 и коле;ю 11 затормозятся. При перемещении рукоятки 18 в положение 40 «Пуск (на фиг. 1 показано контурными линиями) муфта 2 перем стится вправо (а при обратном вращении - влево) и соединит с валом 1 блок свободно сидящих на нем колес, и движение передастся на центрирующее 45 звено 4 зажимного патрона и на шпиндель 3. Несколько ранее конечный выключатель 17 разомкнется, питание электромагнита 16 прекратится, золотник 15 займет нейтральное 50 положение, вследствие этого растормозятся диск тормозного устройства и жестко связанные с ним водило 9 одноступенчатого дифференциала и центральное колесо 11 двуступенчатого дифференциала. При этом вал 48 .55 и шпиндель 3 начинают вращаться в противоположных направлениях. В результате возникает относительное вращение центрирующего звена и кулачков 51, и они начинают перемещаться до встречи с заготовкой. Когда выберутся зазоры в сопряжениях и упругие деформации звеньев, между шпиляелем 3 и валом 48 образуется жесткая связь. С этого момента вал 48, звенья вариатора 6. цент1ральное колесо 12 меняют направление 65 5 10 20 зо 60 вращения и маховик 8 разгоняется до скорости установившегося движения. При выключении вращения шпинделя 3 происходит следующее. К моменту выключения главного движения маховик 8 на.ходится в режиме установившегося движения. При перемещении рукоятки 18 в положение, показанное на фиг. 1 штрих-пунктирной линией, млфта 2 рассоединяется с блоком свободно сидящих на валу 1 колес. Одновременно кулачок рукоятки 18 замкнет Контакты концевого выключателя 17, электромагнит 16 переместит золотник 15 вправо. При этом затормозятся диск тормозного устройства 10, водило 9 одноступенчатого дифференциала, центральное колесо 11 двуступенчатого дифференциала. Имеющийся к этому времени на маховике 8 момент будет импульсно передан на центрирующее звено 4, которое получит реверсивное вращение. Управление механизированным зажимомразжимом осуществляется в момент подводаотвода любого из суппортов к поверхности детали. При этом срабатывает один из упоров 32 или 33 и соответствующий переключатель 30 или 31. Второй переключатель отводится по направляющей в нерабочее положение и отключается. Управление упооами 32 и 33 осуществляется рукояткой 52. Если перезести ее в нейтпальное положение, когда один из vnopOB уйдет с рабочей линии, а второй еще не выйдет на рабочую линию (положение I на фиг. 3), то это положение будет соответствовать ручному управлению, которое осуществляется одним из переключателей при отключенном втором, Автоматическое управление в моменты подвода-отвода суппоотов осуществляется следующим образом. В нужном положении устанавливают и Ьиксир тот один из переключателей 30 или 31 и выводят в рабочее положение соответствующий Упор 32 или 33. Рассмотрим работу станка с моментя. когда двигатель станка включен, а шпиндель еще не включен. В этом положении конечный выключатель 17 замкнут, электромагнит 16 получает питание, л-правляемый им золотник 15 находится в крайнем пранолт полоя :ении, а диск тормозного лстройстпа 10 заторможен. При этом сУппорты отведены, т. е. нахогтятся в исходном положении. Тогда переключатель 30 или 31 замкнут, п ттаемый через него электромагнит 29 включен, я золотник 28 ря-сположен так. что лолости А. Б. В пневмопилннлпов 25, 26. 7 соединены с атмосфепой, а полости Л Б , В- г. пневмосетью. ПОЭТОМУ колодки муфт 20 и 21 прижаты пружинами к соответствуюнхим поверхностям. Заготовка устанавливается в патроне, т. е. кулачки 51 вводятся в контакт с заготовкой. С помощью штурвала 47 лстанавливяется н жное исло оборотов ттшинде.дя. При повороте рукоятки 18 в положение «Пуск диск тормозного устройства 10 растормаживается, муфта 2 включает главное движение. Происходит закрепление заготовки. Затем осуществляется подвод сулпорта. В момент подвода Суилорта упор 32 или 33 переключает путевой переключатель 30 или 31 в положение «Выключено. Электромагнит 29 отключается, золотник 28 возвращается в равновесное состояние, в результате чего .полости А Б BI соединяются с атмосферой, а полости А, Б, В - с пневмосетью. Тогда штоки пневмоцилиндров 25, 26, 27, воздействуя через ролики и рычаги муфт 20 и 21 на колодкн, производят рассоединение этих муфт. Упор 32 или 33 при отводе суппорта переводит путевой выключатель 30 или 31 в положение «Включено. Электромагнит 29, получив питание, выводит золотник 28 из равновесного СОСТОЯНИЯ. Полости А, Б, В пневмоцилиндров соединяются с атмосферой, а полости AI, Б , В - с пневмосетью. Што«и пневмоцилиндров освобождают ролики к пружины муфт вводят КОЛОДКИ в зацепление. После отвода суппорта следует остановка главного движения. Для этого рукоятку 18 переводят в .положение «Стоп. Муфта 2 отключает передачу главного движения по кинематическим Цепям. Одновременно с этим замыкается конечный вьгключатель 17, электромагнит 16 получает питание и выводит из равновесного состояния золотник 15. В результате тормозятся диск тормозного устройства 10, водило 9 одноступенчатого дифференциала, центральное колесо I1 двустуненчатого дифференциала, щпиндель 3 и патрон с заготовкой. Приобретенный маховиком 8 момент импульсно передается на центрируЮЩее звено 4, производя раскрепление заготовки. При необходимости на Последних ступенях скоростей ОТКЛЮЧИТЬ инерционные звенья 22 включается в работу .чолотник 34, который управляется кулачком 35. На этих ступенях золотник 34 переместится от кулачка 35 Вправо. Вследствие этого шток пневмоцилиндра 27 откажется в Крайнем левом положении и отключит муЛту 21, так как при этом положении золотника 34 и работе золотника 28 в по«жнем режиме полость В пневмоп линдра 27 всегда соединена с пиевмосетью. Но так как золотник 28 продолжает работать в прежнем режиме, то полость В пневмоцилиндра 27 поочередно сое.иняется. то с пнеВМосетью, то с атмосферой. При этом, Когда обе полости пневмоцилиндра 27 о.казываются соединены с пневмосетью, щток пневмотшлинлра продолжает оставаться в крайнем левом .но ложении, а муфта 21 рассоединена С приводНым звеном 24 шарикового дифференциала. Формула изобретения 1. Металлорежущий станок, например токарный, содержащий привод главного движения, полый штинлель, который иаходится в «ннематической связи с приводом и несет на себе зажимной самоцентрирующий патрон, кулачки которого радиально перемещаются при вращении связанного с ними центрирующего звена, и привода звена, отличающийся тем, что, с целью использования пускового и тормозного моментов главного движения для реверсивного вращения центрирующего звена, он снабжен тормозным устройством, зправление которым сблокировано с управлением главного движения и дифференЦиальной передачей, состоящей из одноступенчатого .дифференциала с внутренним и наружным зацеплениями и двуступенчатого дифференциала с двумя зацеплениЯМИ, причем наружное центральное колесо одноступенчатого дифференциала несет на себе маховик, а его ВО.ДИЛО кинематически связано с приводом глав-ного движения и жестко - с диском тормозного устройства и первым центральным колесом двуст пенчатого дифференциала, второе центральное колесо которого в свою очередь кинематически связано с центрирующим звеном зажимного патрона, а водило жестко связано с внутренним центральньш колесом Одноступенчатого дифференциала. 2.Станок по п. I, отличающийся тем, что, с целью регулировки усилий раскрепления и закрепления на разных скоростях пуска и торможения, он снабжен .двумя дисковыми вариаторами скоростей, двумя группами инерционных звеньев, тремя центробежными муфтами и шариковым дифференциалом, причем один вариатор взаимодействз ет с приводом главного движения и водилОМ одноступенчатого дифференциала, второй вариатор -со вторым центральным колесом двустуцеичатого дифференциала и центрирующим звеном зажимного патрона; одна группа инерционных звеньев взаимодействует с первым вариатором скоростей и водилом ОДно.ступенчатого дифференциала, вторая группа- со шпинделем; дна муфта взаимодействует с приводом главного движения и первым вариаторОМ скоростей, вторая муфта со вторым вариатором и центрирующим звеном зажимного патрона, третья муфта-со шпинделем и приводным звенОМ шарикового дифференциала, который в свою очередь взаимодействует со шпинделем и второй группой инернионных звеньев. 3.Станок но п. 2, отличающийся тем, что, с целью включения и отключения механизмов, осуществляющих зажим-разлсим, соосно с центробежными муфтами установлены иневмоцилиндры, управляемые через электромагниты, золотники и путевые переключатели, установленные на путях перемещения суппортов в станках, причем штоки пневмодилиндров взаимодействуют с рычагами муфт. 4.СтаНок по пп. 1-3, отличающийся тем, что для облеГчения ручного управления нентрирующим зпеном, в планшайбе патрона смонтировяна ДВУСТОООННЯЯ муфта свободного хода, наружная обойма которой находится в кинематической связи со вторым ценпральным колесом двуступенчатого дифференциала, внутренняя обойма жестко связана с центрирующим звеном патрона, а поводковая вилка нематически связана с поворотным диском, смонтированным на подшипниках на «аруЖНОЙ .поверхности планшайбы.
5. Станок 1ПО пп. 1-4, отличающийся тем, что, с целью упрощения управления, он снабжен механизмом блокировки, содержащим цилиндрические кулачки, сопряженные через Профильный паз с рычагами, которые
подвижно сопряжены с блоками коробки скоростей и с цилиндрическими дисками вариаторов, а также дисковые кулачки и жестко связанные с «ими зубчатые колеса, Находящиеся в зацеплении с рейками, подвижно сопряженными через пазы с буртиками цилиндрических дисков вариаторов, причем на поверхность дисковых кулачков опираются ролики, установленные на концах кривошипов сдвоенных кривошипно-ползунных механизмов, несущих инерционные звенья.

| название | год | авторы | номер документа |
|---|---|---|---|
| Резьботокарный станок | 1979 |
|
SU931336A1 |
| БИБЛИОТЕКА J | 1970 |
|
SU287500A1 |
| Токарный станок для обработки канавок кулачков самоцентрирующих патронов | 1982 |
|
SU1077705A1 |
| Устройство для дробления стружки | 1977 |
|
SU722689A2 |
| Станок для обработки концов труб | 1983 |
|
SU1106600A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1984 |
|
SU1166907A1 |
| Токарно-винторезный станок | 1981 |
|
SU1160926A3 |
| Токарный станок | 1988 |
|
SU1634367A1 |
| Станок для резки цилиндрических заготовок | 1972 |
|
SU488690A2 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |

Ш
/j
pilO
1/
.-.v,-™.
I..-„-.pifi
4 / I,. ДчХ;
/ / /
l-J/l .ЖЙХ -,..,
1 Z.//
/I , ; 1 О I , 1
f,,......i :j;; fi}i: ,tf: -Vi-i.( I
j П I o
FSTrfi -fr ( -y:/i---;;:; i
1 ;.mi.mvv; -;
rW-H , ,, I ll-libr hU;:
.
I-Ij
-
L - 1
-itf 2,y L/-JI
t
С поз.
Qmn0330,3t
ж.,,
J-
J;
. /2
27
г-г
N
1
ИпдД
