1
Изобретение относится к устройствам для определения прецизионного позиционирования объектов и может быть использовано в области двигателестроения применительно к механическим регуляторам, скорости.
Цель изобретения - повышение точности измерения координат центра тяжести.
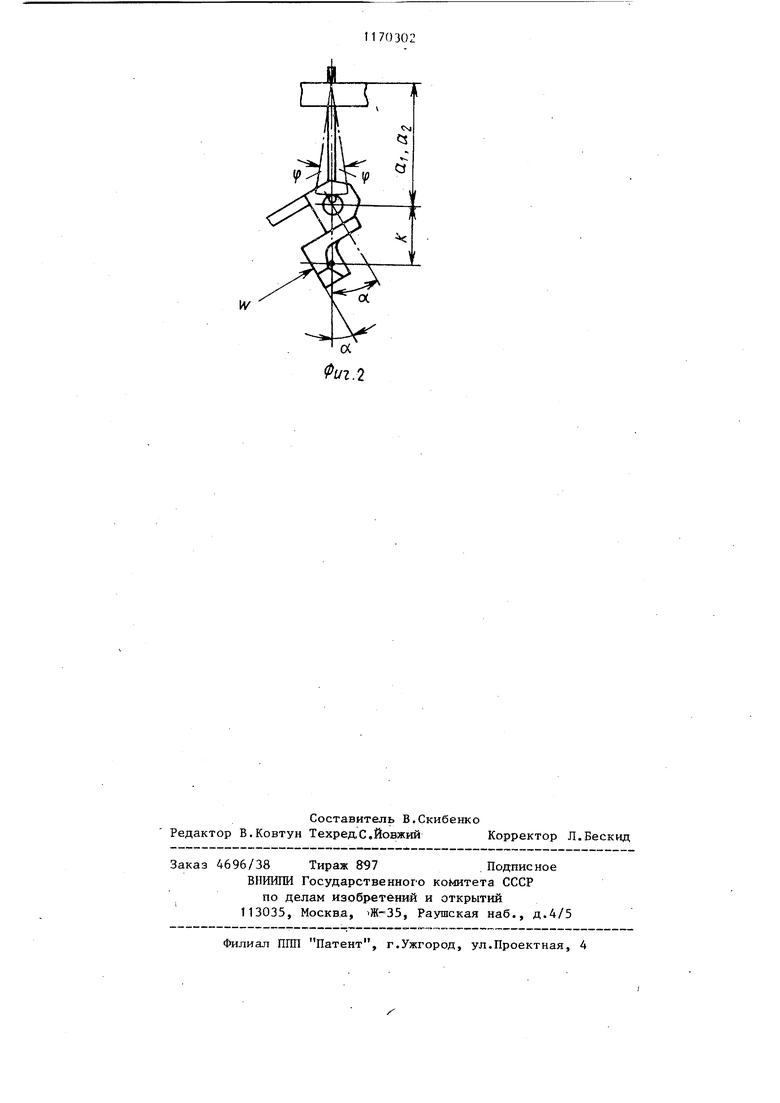
На фиг.1 изображено устройство для осуществления способа, вид спереди; на фиг.2 - то же, вид сбоку
Устройство состоит из плоскопараллельных опор 1 ножевого типа, на которых на подвесе 2 закреплено тело 3. При колебаниях груз периодически становится между источником света 4 и фотодатчиком 5, сигнал которого усиливается усилителем 6 и регистрируется частотометром-хронометром 7..
Тело 3 {фиг.1) подвешивают на плоскопараллельных опорах 1 на подвесе 2 длиной а 50 мм так, чтобы оно находилось между источником света 4 и фотодатчиком, например, типа СФ2-6. После сообщения телу колебательного движения относительно вертикальной оси так, чтобы амплитуда колебаний не превышала , тело начинает периодически пересекать пучок света, направленный от источника 4 на фотодатчик 5. На выходе фотодатчика возникает напряжение, импульс которого усиливается ЭЛЕКТРОННЫМ усилителем, в который в качестве составной части входит триггер Шмитта, преобразующий форму импульса напряжения фотодатчика в строго прямоугольную при сохранении длительности импульса. Сигнал от усилителя 6 поступает на частотометр-хронометр 7 Время между двумя одноименными точками двух соседних импульсов i вьщается в виде цифровой индикации с точностью до 0,01%. После этого опыт повторяют на подвесе 2 длиной 100 мм и определяют период колебаний 2Известно, что момент инерции тела D относительно любой оси равняется сумме момента инерции тела 3 относительно оси, проходящей через центр тяжести тела параллельно этой оси.
70302,2
и произведению массы тела М на квадрат расстояния между осями
где . - расстояние от центра тяжести
до точки подвеса.
Проведя две последовательные операции с различными длинами подвеса, воспользуемся равенством момента 10 инерции тела .относительно оси
(k.«j(-)-Kf .)(-)-(a).
м
Из данного уравнения находим вели20 чину расстояния от точки закрепления тела до координаты центра тяжести k
nч.. ,)
.J
где й - расстояние от точки з-акрепления тела до точки подвеса 0при первой установке тела-,
Й2 расстояние от точки закрепления тела до точки подвеса при второй установке тела; t, -tj - периоды колебаний тела при
Иг
- ускорение свободного падения.
Поскольку во всех случаях используются одни и те же опоры, погрешность, вносимая неверными значениями с и «2 , будет также постоянной. Значения « и а( были измерены с точностью 10,05 мм, что при наиболее неблагоприятном сочетании погрешностей давало систематическую погрешность при определении К до 2%.
Периоды определялись с точностью 0,01%. При наиболее неблагоприятном сочетании погрешностей -t и {j ошибка в определении К составляла 0,3%. Эта оишбка для группы грузов была случайной и поэтому принималась во внимание при сравнении полученных значений К.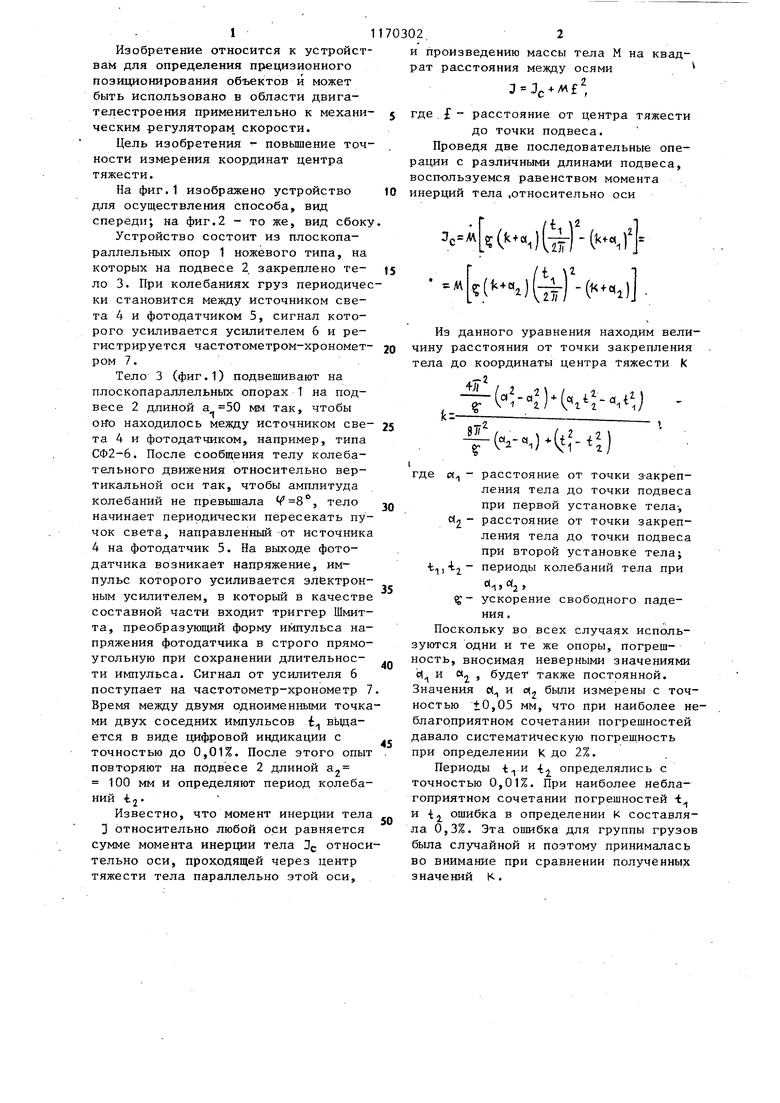
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| Способ испытаний образцов материалов на ползучесть | 1990 |
|
SU1770814A1 |
| Устройство для определения момента инерции рыб | 1979 |
|
SU787990A1 |
| Устройство для измерения ускорения силы тяжести | 1982 |
|
SU1132275A1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ МАССО-ЦЕНТРОВОЧНЫХ И МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ТВЕРДОГО ТЕЛА ВРАЩЕНИЯ | 2010 |
|
RU2445592C1 |
| Вискозиметр | 1980 |
|
SU868470A1 |
| Способ испытаний образцов материалов на ползучесть | 1990 |
|
SU1753348A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ ЕГО УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ПРИВОДОВ | 1997 |
|
RU2114031C1 |
| Способ определения температурного коэффициента линейного расширения твердых тел | 1977 |
|
SU693192A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРЕНИЯ ПРИ УДАРЕ | 2008 |
|
RU2372605C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ ЦЕНТРА ТЯЖЕСТИ ТЕЛА относительно точки подвеса, заключающийся в подвесе тела и определении координаты, отличающийся тем, что, с целью повышения точности измерения, осуществляют последовательную установку тела на подвесах двух различных фиксированных длин и свободное колебание тела, и при каждой установке осущ€.ствляют измерение периодов колебаний, причем расстояние от точки закрепления тела до координаты центра тяжести определяют по соотношению Jl тЛ (Т 2 / 2. 1 --- Irtt-M + и i -а i V -1 г i W А (.-)) где расстояние от точки подвеса i до точки закреплершя тела 1(П при первой установке тела; . расстояние от точки закрепления тела до точки подвеса при второй установке тела; t i-fcj- периоды колебаний тела при «,, «2, - ускорение свободного падения. gem I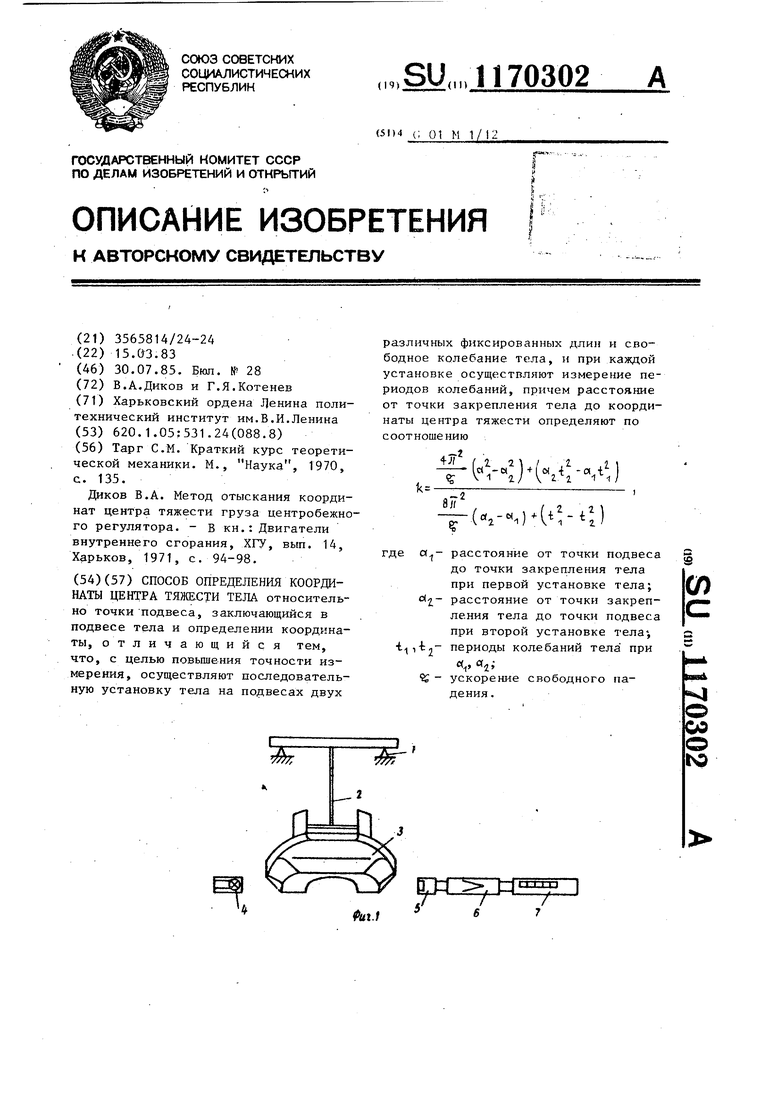
| Тарг С.М | |||
| Краткий курс теоретической механики | |||
| М., Наука, 1970, с | |||
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
| Диков В.А | |||
| Метод отыскания координат центра тяжести груза центробежного регулятора | |||
| - В кн.: Двигатели внутреннего сгорания, ХГУ, вып | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Экономайзер | 0 |
|
SU94A1 |
