2, Регулятор по п. 1, отличающийся тем, что в блоке управления возбуждением в аварийных режимах между выходом интегратора и входом первого согласующего усилителя и между выходом датчика частоты вращения ротора и входом второго согласукдцего усилителя дополнительно включены узлы выделения переменной составляющей контролируемого параметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для форсировки возбуждения синхронных машин | 1982 |
|
SU1107245A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Вентильный электродвигатель | 1985 |
|
SU1267578A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Устройство для возбуждения асинхронизированной синхронной машины | 1987 |
|
SU1534744A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| УСТРОЙСТВО ИСПЫТАНИЙ ЧАСТОТНО-УПРАВЛЯЕМОГО ГРЕБНОГО ЭЛЕКТРОПРИВОДА СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ В УСЛОВИЯХ СТЕНДА | 2011 |
|
RU2462728C1 |
1. АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ВОЗБУЖДЕНИЯ ДЛЯ СИНХРОННЫХ МАШН, содержащий регулятор тока возбуждения сильного действия, входы которого соединены с выходами датчика частоты, датчика текущего значения напряжения на шинах синхронной машины, датчиков тока и напряжения ротора, блок управления возбуждением в аварийных режимах, силовой блок, включенный выходом на обмотку возбуждения синхронной машины и источники напряжения форсировки и расфорсировки, соединенные с входами питания силового блока, отличающийся тем, что, с целью повьшения надежности противоаварийного управления и качества электроэнергии за счет улучшения демпфирования электромеханических колебаний роторов синхронных машин, в него дополнительно введены релейный усилитель, переключатель с двумя основными и двумя управляющими входа-. ми, первьй блок управления переключателем, который имеет на входе два пороговых элемента со своими уровнями срабатьшания, причем выходы пороговых элементов подключены к входам двухвходового элемента И, второй блок управления переключателем, на п входах которого установлены пороговые элементы с соответствующими уровнями срабатывания, выходы которых соединены с входами элемента ИЛИ, выход .логического элемента И включен на первый управляющий вход переключателя, а выход логического элемента ИЛИ - на второй управляющий вход, силовой блок выполнен в виде ключа, а блок управления возбуждением в аварийных режиS мах - в виде сумматора с тремя вхо(Л дами, на каждом из которых установлены согласующие усилители, причем первый вход связан с выходом датчика частоты через интегратор, второй вход - с выходом датчика частоты непосредственно, а третий вход - с выходом датчика частоты через дифференциатор, при этом выход блока управления возбуждением в аварийных режимах соединен со сд с первым основным входом переключателя, второй основной вход которого связан с выходом регулятора тока возбуждения сильного действия, причем выход переключателя включен через релейный усилитель на управляЮ11ЩЙ вход силового блока, при этом входы первого блока управления переключателем соединены с первым и вторым входами сумматора блока управления возбуждения в аварийных режимах, а входы вторрго блока управления переключателем связаны с выходами датчиков режимных параметров синхронной машины.
1
Изобретение относится к электротехнике и может быть использовано в системах автоматического регулирования тока возбуждения синхронных машин, преимущественно генераторов большой мощности.
Целью изобретения является повышение надежности противоаварийного управления и качества электроэнергии за счет улучшения демпфирования электромеханических колебаний роторов синхронных машин.
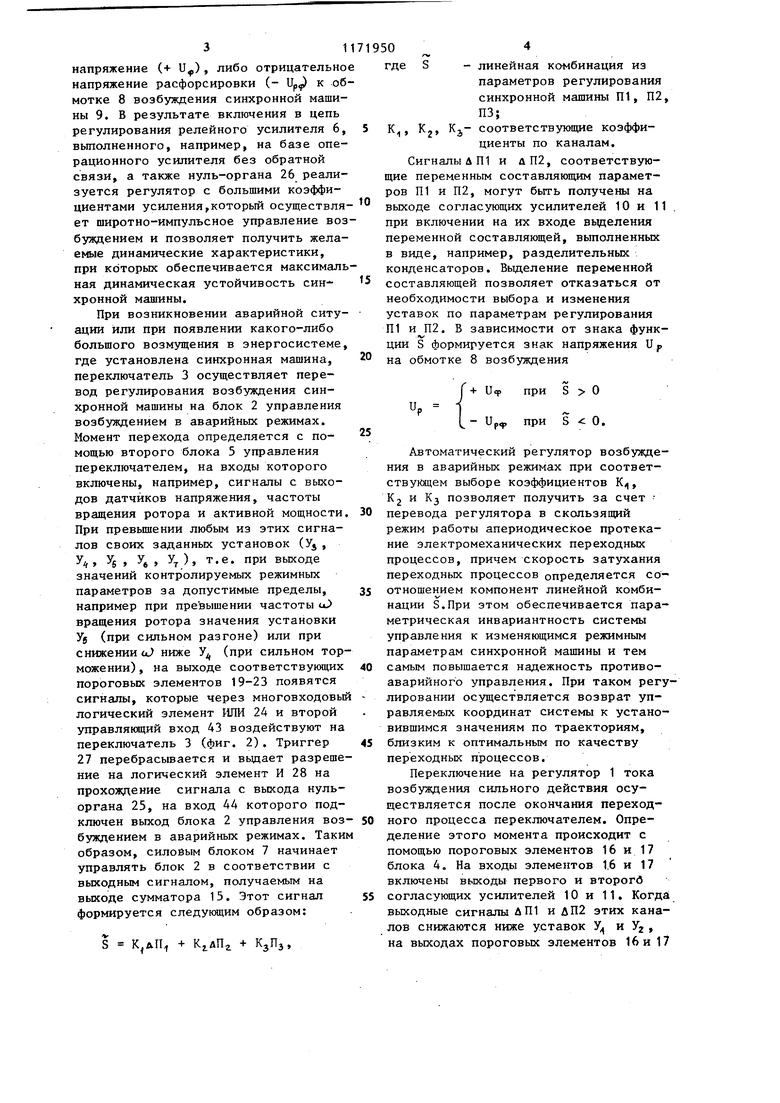
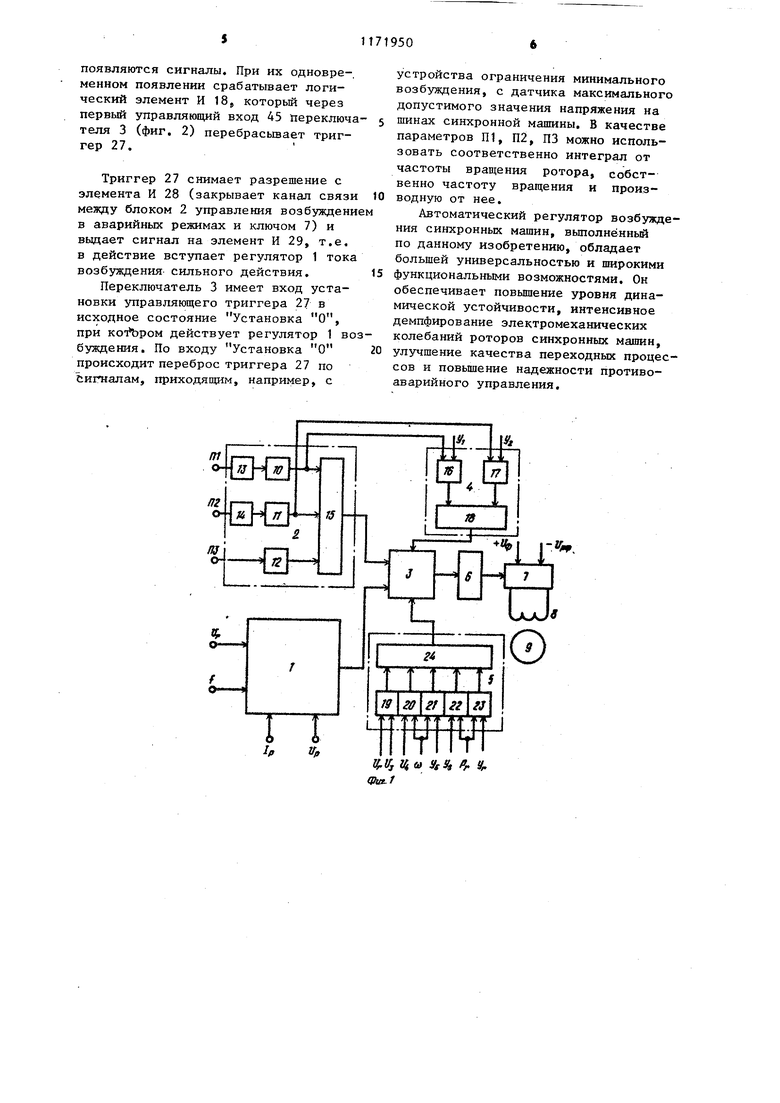
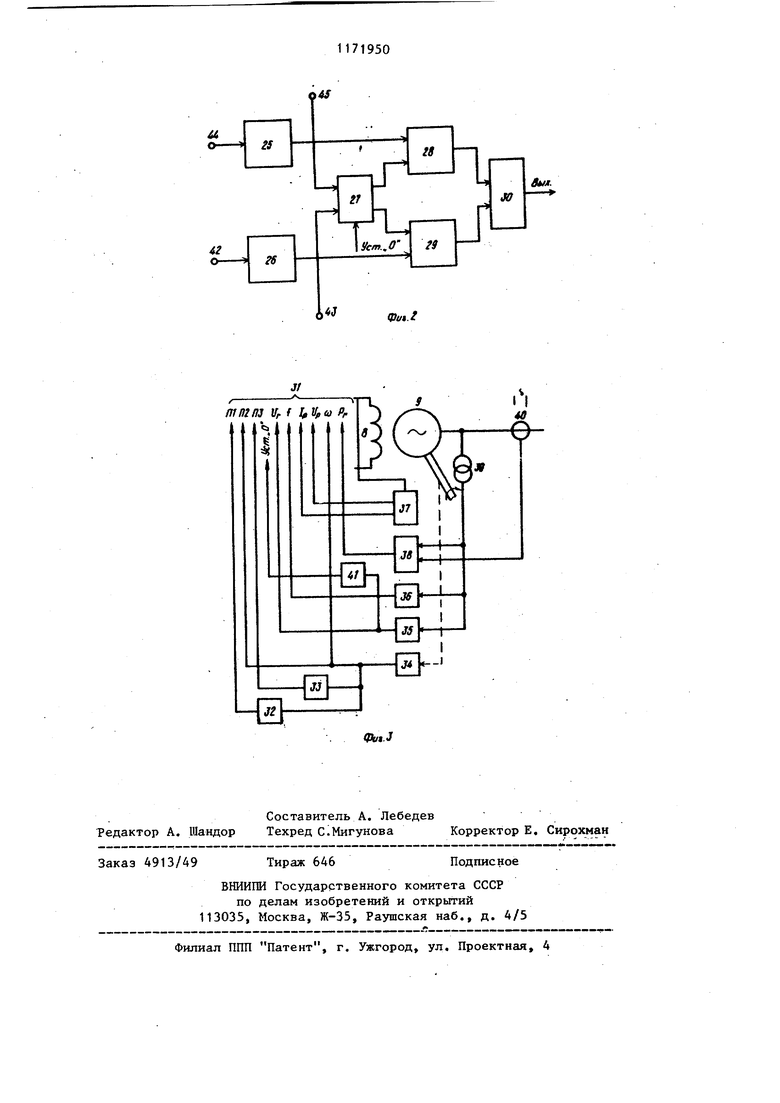
На фиг. 1 представлена функциональная схема автоматического регулятора возбуждения для синхронных машин; на фиг. 2 - пример вьшолнения переключателя; на фиг. 3 - взаимосвязь.между датчиками контролируемых параметров и регулятором возбуждения
Регулятор 1 тока возбуждения сильного действия (фиг. 1) и блок 2 управления возбуждением в аварийных режимах включены на входы переключателя 3, управлякщие входы которого соединены с первым 4 и вторым 5 блоками управления переключателем. Выход переключателя 3 через релейный усилитель 6 соединен с.управляющим входом силового блока 7, включенного на обмотку 8 возбзждения синхронной машины 9.
Блок 2 управления возбуждением в аварийных режимах содержит три согласующих услителя 10-12, узлы 13 и 14 выделения переменной составляющей и сумматор 15, входы которого соединены с выходами согласукядих усилителей.
Первый блок 4 управления переключателем выполнен в виде двух пороговых элементов 16 и 17, выходы которых соединены с двухвходовым логическим элементом И 18, а второй блок 5 - в виде пороговых элементов 19-23
и многовходового логического элемента ИЛИ 24.
Переключатель 3 (фиг. 2) может содержать два нуль-органа 25 и 26, управляющий триггер 27 с раздельными входами, выходы которого также как и выходы нуль-органов 25 и 26 соединены с соответствующими входами логических элементов 28 и 29, выходы которых связаны с входами логического элемента ИЛИ 30.
Входы 31 автоматического регулятора возбуждения (фиг. 3) соединены соответственно П1, П2 и ПЗ через
интегратор 32 напрямую и через дифференциатор 33 с датчиком 34 частоты вращения ротора, U - с датчиком 35 напряжения на шинах синхронной машины, f - с датчиком 36 частоты,
IP и Up - с ДАТЧИКОМ 37 обратных связей к Pf. - с датчиком 38 активной мощности, входы которого соединены с трансформатором 39 напряжения и трансформатором 40 тока. Выход датчика 35 напряжения связан с входом датчика 41 максимально допустимого значения напряжения на шинах синхронной мапины.
Автоматический регулятор возбуждения для синхронных машин работает следующим образом.
В нормальном режиме выход регулятора 1 тока возбуждения сильного действия через переключатель 3 (вход 42) по цепи нуль-орган 26 - логический элемент И 29 - логический элемент ИЖ 30 подключен к входу релейного усилителя 6,
Силовой блок (ключ) 7 в зависимости от выходного сигнала релейного усилителя 6, который формируется в соответствии с алгоритмом работы регулятора 1 сильного действия, подаёт либо положительное форсировочное 3 напряжение («- U) , либо отрицательно напряжение расфорсировки (- Up к об мотке 8 возбуждения синхронной машины 9. В результате включения в цепь регулирования релейного усилителя 6 вьтолненного, например, на базе операционного усилителя без обратной связи, а также нуль-органа 26 реализуется регулятор с большими коэффициентами усиления,который осуществля ет широтно-импульсное управление воз буждением и позволяет получить желаемые динамические характеристики, при которых обеспечивается максималь ная динамическая устойчивость синхронной машины. При возникновении аварийной ситуации или при появлении какого-либо большого возмущения в энергосистеме где установлена синхронная машина, переключатель 3 осуществляет перевод регулирования возбуждения синхронной машины на блок 2 управления возбуждением в аварийных режимах. Момент перехода определяется с помощью второго блока 5 управления переключателем, на входы которого включены, например, сигналы с выходов датчиков напряжения, частоты вращения ротора и активной мощности При превышении любым из этих сигналов своих заданных установок (Уд , i, s 6 7 т.е. при выходе значений контролируемых режимных параметров за допустимые пределы, например при превышении частоты tO вращения ротора значения установки Yj (при сильном разгоне) или при снижении а ниже У, (при сильном торможении) , на вьпсоде соответствующих пороговых элементов 19-23 появятся сигналы, которые через многовходовый логический элемент ИЛИ 24 и второй управляющий вход 43 воздействуют на переключатель 3 (фиг. 2). Триггер 27 перебрасывается и вьщает разреше ние на логический элемент И 28 на прохождение сигнала с выхода нульоргана 25, на вход 44 которого подключен выход блока 2 управления воз буждением в аварийных режимах. Таки образом, силойым блоком 7 начинает управлять блок 2 в соответствии с выходным сигналом, получаемым на выходе сумматора 15. Этот сигнал формируется следующим образом: S + К2.дПг. + , 0 4 где S - линейная комбинация из параметров регулирования синхронной машины П1, П2, ИЗ; К, Kj, Kj- соответствующие коэффициенты по каналам. Сигналы А П1 и дП2, соответствующие переменным составляющим параметров П1 и П2, могут быть получены на выходе согласующих усилителей 10 и 11 при включении на их входе вьщеления переменной составляющей, вьтолненных в виде, например, разделительных конденсаторов. Вьщеление переменной составляющей позволяет отказаться от необходимости выбора и изменения уставок по параметрам регулирования П1 и П2. В зависимости от знака функции S формируется знак напряжения Up на обмотке 8 возбуждения + Vf при S О - Up при S «: 0. Автоматический регулятор возбуждения в аварийных режимах при соответствукхцем выборе коэффициентов К, Kj и Кз позволяет получить за счет перевода регулятора в скользящий режим работы апериодическое протекание электромеханических переходных процессов, причем скорость затухания переходных процессов определяется соотношением компонент линейной комбинации З.При этом обеспечивается параметрическая инвариантность системы управления к изменяющимся режимным параметрам синхронной машины и тем самым повышается надежность противоаварийного управления. При таком регулировании осуществляется возврат управляемых координат системы к установившимся значениям по траекториям, близким к оптимальным по качеству переходных процессов. Переключение на регулятор 1 тока возбуждения сильного действия осуществляется после окончания переходного процесса переключателем. Определение этого момента происходит с помощью пороговых элементов 16 и 17 блока 4. На входы элементов 1.6 и 17 включены выходы первого и второгб согласующих усилителей 10 и 11. Когда выходные сигналы ДП1 и ДП2 этих каналов снижаются ниже уставок У и Уг , на выходах пороговых элементов 16 и 17
появляются сигналы. При ик одновре-. менном появлении срабатывает логический элемент И 18 который через первый управляющий вход 45 йереключа теля 3 (фиг. 2) перебрасьшает триггер 27.
Триггер 27 снимает разрешение с элемента И 28 (закрывает канал связи между блоком 2 управления возбуждени в аварийных режимах и ключом 7) и выдает сигнал на элемент И 29, т.е. в действие встзтает регулятор 1 тока возбуждения сильного действия.
Переключатель 3 имеет вход установки управляющего триггера 27 в исходное состояние Установка О, при ко-Лэром действует регулятор 1 вобуждения. По входу Установка О происходит переброс триггера 27 по Сигналам, приходящим, например, с
ГТ fffrWf
устройства ограничения минимального возбуждения, с датчика максимального допустимого значения напряжения на шинах синхронной машины. В качестве параметров П1, П2, ПЗ можно использовать соответственно интеграл от частоты вращения ротора, собственно частоту вращения и производную от нее.
Автоматический регулятор возбуждния синхронных машин, вьшолнённый по данному изобретению, обладает большей универсальностью и широкими функциональными возможностями. Он обеспечивает повышение уровня динамической устойчивости, интенсивное демпфирование электромеханических колебаний роторов синхронных машин, улучшение качества переходных процесов и повьш1ение надежности противоаварийного управления.
±, | |-V
Vi а flr i(Put-l
и
tput.l
| Способ автоматического управления возбуждением синхронных генераторов | 1972 |
|
SU448562A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Соловьев И.И | |||
| Автоматические регуляторы синхронных генераторов | |||
| М.: Знергоиздат, 1981, с | |||
| Способ применения резонанс конденсатора, подключенного известным уже образом параллельно к обмотке трансформатора, дающего напряжение на анод генераторных ламп | 1922 |
|
SU129A1 |
