1 (61) 1246239
(21)4279792/24-07
(22)09.07.87
(46) 23.09.89. Бюл. № 35
(71)Всесоюзный научно-исследовательский институт электроэнергетики
(72)В.В.Саркисян, Р.С.Цгоев, И.Ю.Мирошников и Ю.Г.Шакарян
(53)621.311.016 (088.8)
(56)Авторское свидетельство СССР № 1246239, кл. Н 02 J 3/06, .1986.
(54)УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИН- ХРОНИЗИРОВАННЫМ ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ
(57)Изобретение относится к электротехнике, в частности к асинхронизиро- ванным электромеханическим преобразователям частоты (АС ЭМШО для гибкой связи энергосистем с различающимися частотами. Целью изобретения является повьшенйе надежности функционирования межсистемной связи путем сохранения работоспособности АС ЭПМЧ при
потере возбуждения одной из фаз об- . мотки ротора. При потере возбуждения одной из фаз первой машины срабатывает устройство релейной защиты первой машины, в результате чего первая машина работает в синхронном режиме, поддерживая заданное значение напряжения, вторая же машина обеспечивает заданные значения мощности и напряжения и демпфирует колебания частоты вращения. При потере возбуждения одной из фаз второй машины срабатывает устройство релейной защиты второй машины, в результате чего уже вторая машина работает в синхронном режиме, поддерживая заданное значение напряжения, первая же машина обеспечивает заданные значения мощности и напряжения и демпфирует колебания частоты вращения. Устройство позволяет сохранить заданный переток мощности по межсистемной связи при потере возбуждения одной из фаз обмотки ротора, т.е. сохранить работоспособность АС ЭМПЧ. 10 ил.
с $
(Л
сд
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты (его варианты) | 1984 |
|
SU1246239A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1598041A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем | 1986 |
|
SU1411881A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1576976A1 |
| Способ переключения синхронного генератора из энергосистемы с избытком мощности в энергосистему с дефицитом мощности | 1984 |
|
SU1206880A1 |
| Устройство для связи двух энергосистем | 1980 |
|
SU955356A1 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |
Изобретение относится к электротехнике , в частности, к асинхронизированным электромеханическим преобразователям частоты (АС ЭМПЧ) для гибкой связи энергосистем с различающимися частотами. Целью изобретения является повышение надежности функционирования межсистемной связи путем сохранения работоспособности АС ЭПМЧ при потере возбуждения одной из фаз обмотки ротора. При потере возбуждения одной из фаз первой машины срабатывает устройство релейной защиты первой машины, в результате чего первая машина работает в синхронном режиме, поддерживая заданное значение напряжения, вторая же машина обеспечивает заданные значения мощности и напряжения и демпфирует колебания частоты вращения. При потере возбуждения одной из фаз второй машины срабатывает устройство релейной защиты второй машины, в результате чего уже вторая машина работает в синхронном режиме, поддерживая заданное значение напряжения, первая же машина обеспечивает заданные значения мощности и напряжения и демпфирует колебания частоты вращения. Устройство позволяет сохранить заданный переток мощности по межсистемной связи при потере возбуждения одной из фаз обмотки ротора, т.е. сохранить работоспособность АС ЭМПЧ. 10 ил.
Изобретение относится к электротехнике, в частности к передаче электрической энергии по линиям переменного, тока, a более конкретно к электромеханическим преобразователям частоты для гибкой связи энергосистем с разл 1чаю1цимися частотами, и является усовершенствованием известного устройства по авт.св. № 1246239 п.1.
Целью изобретения является повьшенйе надежности функционирования меж«
системной связи путем сохранения работоспособности АС ЭМПЧ при потере возбуждения одной из фаз обмотки ро- ;гора.
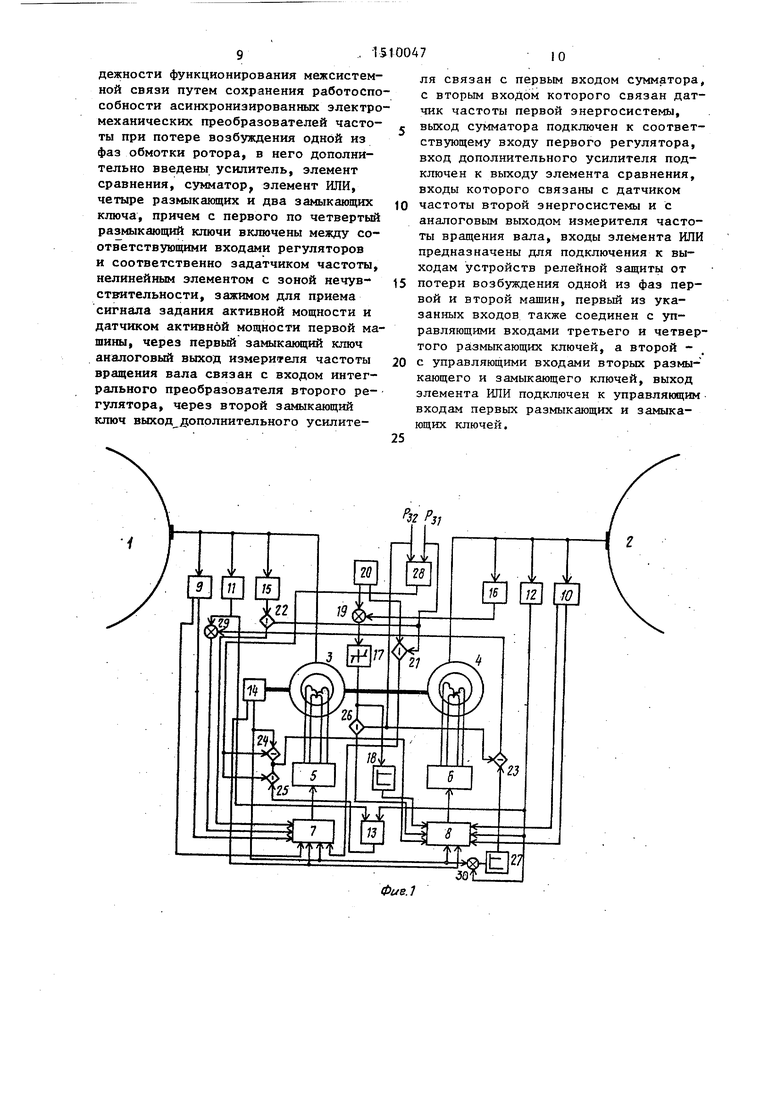
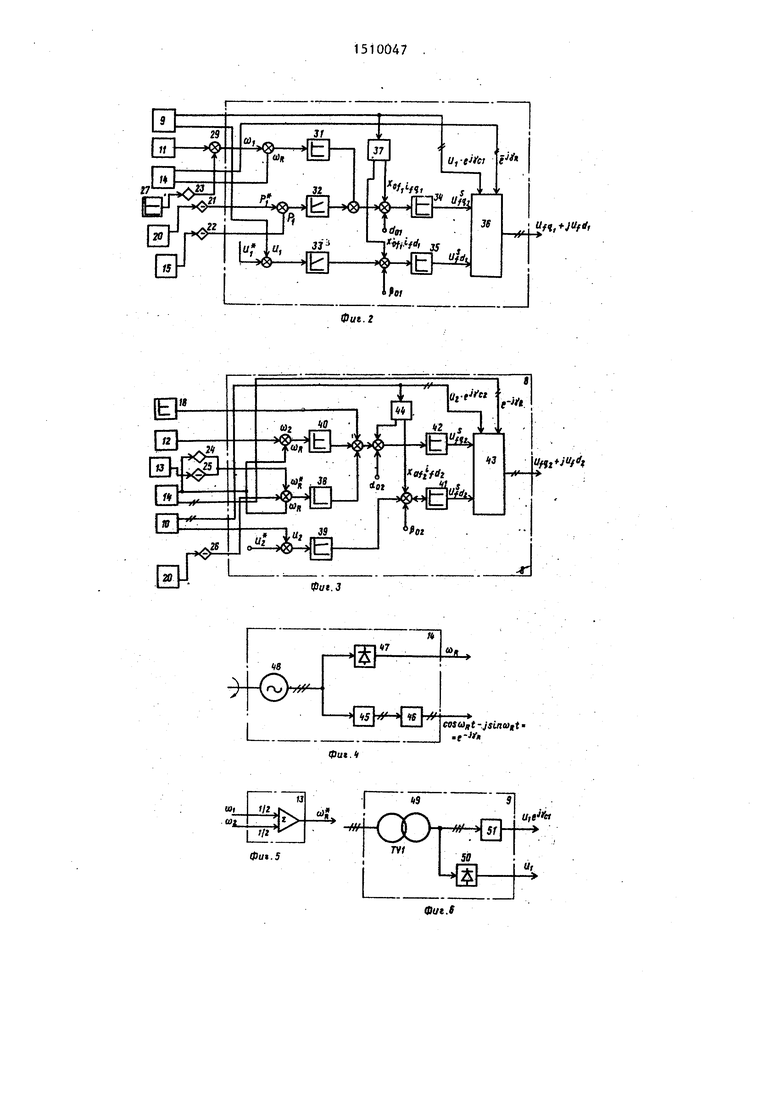
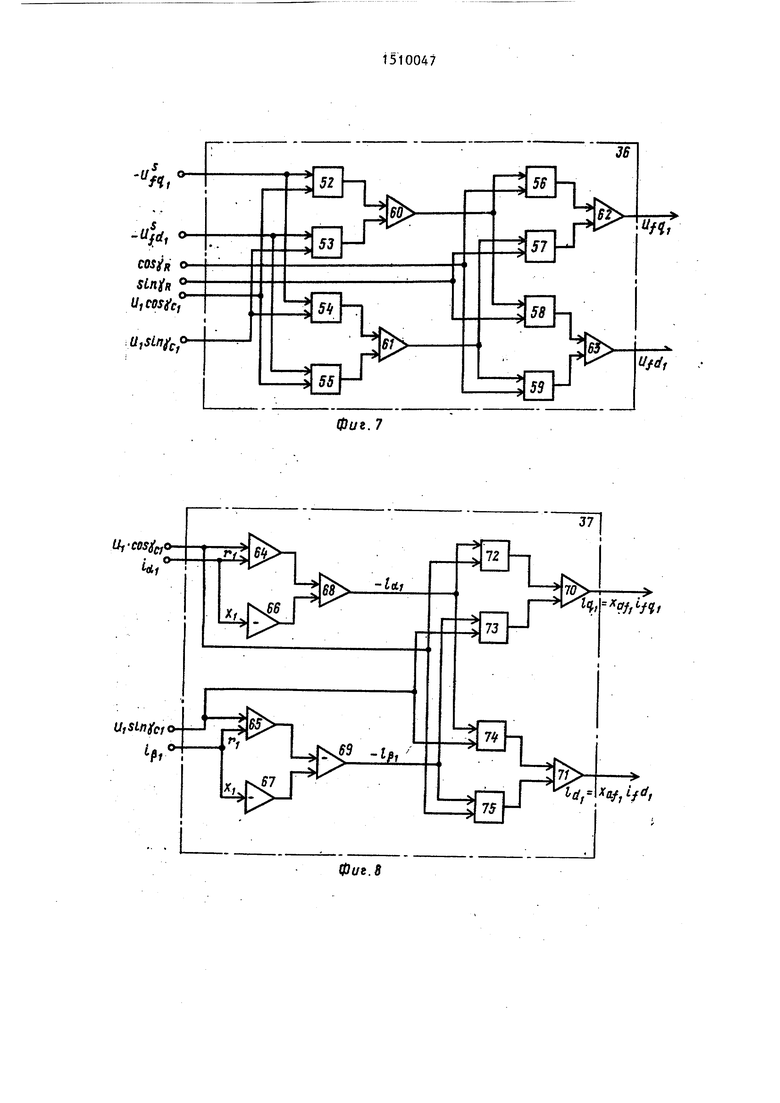
На фиг. 1 представлена схема предлагаемого устройства для управления АС ЭМПЧ; на фиг. 2 и 3 - схемы регуляторов; на фиг. 4 - схема измерителя частоты вращения вала; на фиг. 5 - задатчик частоты вращения вала; на фиг. 6 - датчик напряжения; на фиг. 71Ч
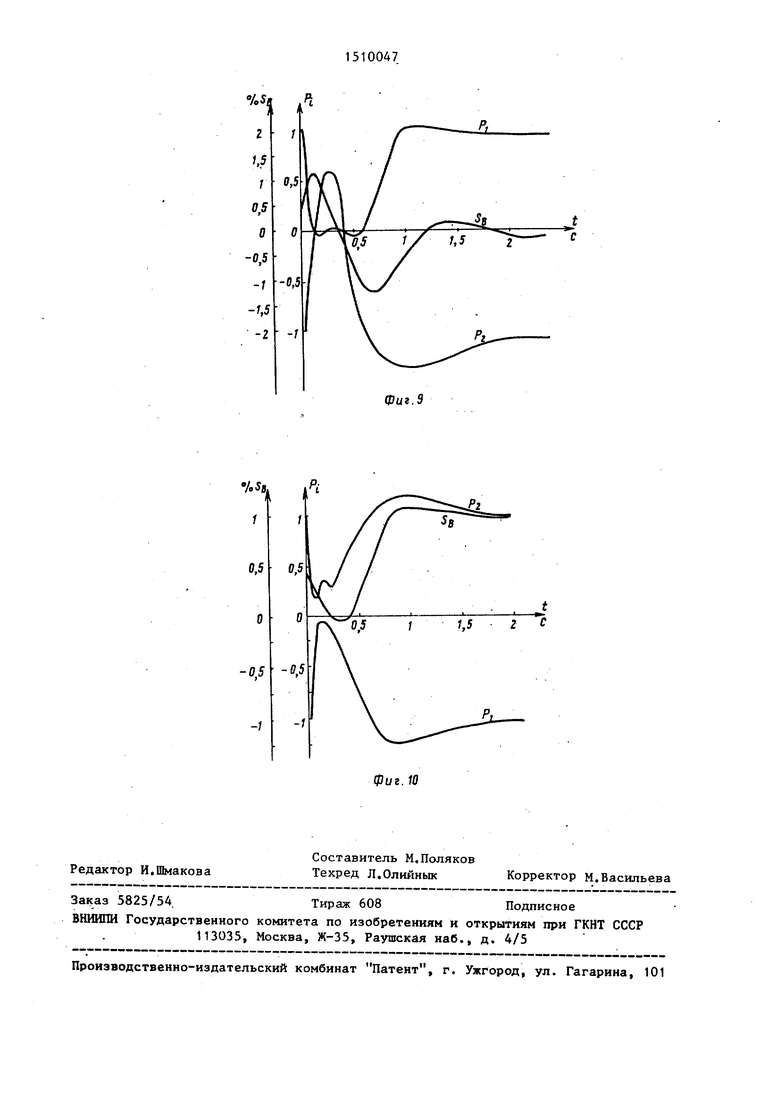
преобразователь координат, на фиг. 8 - формирователь проекций тока ротора; на фиг. 9 и 10 - графики переходных процессов, рассчитанные на ЦВМ, при потере возбуждения соответственно на машине, управляемой по мощности, а также на машине, управляемой по частоте вращения вала.
Схема устройства для управления АС ЭМПЧ, связывающего энергосистемы 1 и 2 и состоящего из двух АСМ 3 и 4 с жестко соединенными валами, включает в себя управляемые преобразователи 5 и 6 частоты, входы которых соединены с выходами регуляторов 7 и 8 возбуждения. На входы регуляторо
7и 8 поступает информация от датчиков 9 и t О напряжения и датчиков 11
и 12 частоты энергосистем, сигнал от которых поступает также на вход за- датчика 13 частоты. На входы регуляторов 7 и 8 поступает также информация от измерителя 14 частоты вращени вала и датчиков 15 и 16.активной мощ ности первой .и второй машины, причем информация от датчика 16 активной мощности поступает на вход регулятора 8 через нелинейный элемент 17, усилитель 18 и элемент 19 сравнения. Другой вход элемента 19 сравнения подключен к выходу формирователя 20 уставки активной мощности. Сигнал с другого выхода формирователя 20 через размыкающий ключ 21 поступает на вход регулятора 7, на другой вход которого поступает сигнал от датчика 15 через размыкающий ключ 22. Замыкающие 23, 24 и размыкающие 25, 26 ключи служат для передачи сигналов соответственно от дополнительного : усилителя 27, измерителя 14, задат- чика 13 частоты и нелинейного элемента 17. Устройство содержит элемент ШЖ 28, сумматор 29 и элемент 30 сравнения. На вход дополнительного усилителя 27 поступает сигнал от элемента 30 сравнения, подключенного к вьпсодам датчиков 12 и 14. Один из входов сумматора 29 соединен с выходом датчика 11 частоты, а на другой вход поступает информация через замыкающий ключ 23 от дополнительного усилителя 27. На входы регулятора
8поступают также сигналы от измерителя 14 частоты вращения через замы- кающий ключ 24, от задатчика 13 частоты вращения через размыкающий ключ 25, от нелинейного элемента 17
5
0 5 0 0 с
0
Iчерез размыкающий ключ 26. Управляющие входы ключей 21 и 22 подсоединены К выходу устройства релейной защиты от потери возбуждения первой машины, входы ключей 23 и 26 - к выходу устройства релейной защиты второй машины, входы ключей 24 и 25 - к выходу элемента ИЛИ 28, входы которого соединены с вьгходами устройств релейной защиты.
На входы задатчика 13 подаются сигналы от датчиков 11 и 12 частоты соответственно для формирования на выходе задатчика сигнала задания
.- СО, +«4 Шя - 2
Устройства релейной защиты от потери возбуждения на фиг. 1 не показаны, так как они известны. В простейшем случае могут быть использованы сигналы, например, состояния выходных выключателей управляемых преобразователей частоты.
Каждый из регуляторов 7 и 8 имеет два параллельных канала, один из которых предназначен для поддержания заданного значения напряжения U, и Uj Другой канал предназначен в первой машине - для поддержания мощности Р,, во второй машине - для поддержания частоты вращения вала АС
- м
ЭМПЧ со о. Регулятор 7 состоит из блока 31 регулирования скольжения, блока 32 регулирования активной мощности, блока 33 регулирования напряжения, блоков 34 и 35 регулирования проекций тока ротора, блока 36 преобразования координат и формирователя 37 проекций тока ротора. Блок 38 регулирования скольжения регулятора 8 аналогичен блоку 32 регулятора 7, а все остальные блоки 39-44 регулятора 8 аналогичны соответствующим блокам регулятора 7.
На входы блоков 33 и 39, представляющих собой пропорционально-интегральные преобразователи, подаются через элементы сравнения сигналы от датчиков 9 и 10 напряжения и сигналы напряжения задания U и uj.
В другом параллельном канале формируется сумма выходных сигналов соответственно блоков 31 и 40 регулирования скольжения, представляющих собой усилители, и блоков 32 регулирования активной мощности для первой
машины, усилителя 18 и блока 38 регулирования частоты вращения вала для второй машины. На входы блоков 31 и АО подаются через элементы сравнения( сигналы от датчиков 11 и 12 частоты и измерителя 14 частоты вращения вала. Кроме того, на вход блока 31 подается через элемент сравнения сигнал от дополнительного усилителя 27 через замыкающий ключ 23. На вход блока 32, представляющего собой пропорционально-интегральный преобразователь, подаются через элементы сравЗадатчик 13 частоты вращения вала (фиг. 5) представляет собой суммирующий усилитель, на входы которого подаются сигналы, пропорциональные частотам энергосистем с коэффициентом 1/2. Датчик 9 напряжения (фиг. 6) представляет собой трехфазный измерительный трансформатор 49 напряже- 10 ния, соединенный своим выходом с входом диодного выпрямителя 50 и преобразователя 51 трехфазного сигнала в двухфазный, выход которого соединен с входами преобразователя 36 коорди- нения сигнал РТ с первого выхода фор- 15 нат и формирователя 37 проекций тока
мирователя 20 и сигнал от датчика 15 активной мощности. На вход блока 38, представляющего собой интегральный преобразователь, через элемент сравнения подаются сигналы от задат- чика 13 и измерителя 14 частоты вращения, а также от нелинейного элемента 17. Выходы блоков 31-33 и 38-40 и усилителя 18 через элементы сравнения подсоединены к входам блоков 34, 35, 41 и 42 регулирования проекций тока ротора, представляющих собой усилители, а именно: выходы блоков 31 и 32 - к входу блока 34, выход 33 - к входу блока 35, выходы блоков 38 и 40 - к входу блока 42, выход блока 39 - к входу блока 41. Кроме того, на указанные входы через элементы сравнений подаются сигналы от формирователей 37 и 44 проекций тока ротора и сигналы начального задания проекций напряжения ротора
Ро( Роч
Выходы усилителей 34, 35, 41 и 42 подсоединены к входам соответствующих преобразователей 36 и 43 координат, на другие входы которых поступают двухфазные сигналы соответственно от датчиков 9 и 10 напряжения и от измерителя 14 частоты вращения вала.
Структура измерителя Т4 частоты вращения вала показана на фиг. 4. Выход преобразователя 45 соединен с : входом блока 46 интеграторов, выходом которого является двухфазный сигнал .е , поступающий на входы преобразователей 34 и 41 координат. К входам диодного выпрямителя 47 и преобразователя -45 трёхфазного сигнала в двух- подключен своей -статорной цепью синхронный тахогенератор 48, соединенный с валом АС ЭМПЧ.
ротора.
Преобразователь 36 координат (фиг. 7) состоит из блоков 52-59 перемножения и суммирующих усилите20 лей 60-63.
. Формирователь 37 проекций тока ротора .(фиг. 8) содержит интеграторы 64 и 65, инверторы 66 и 67, суммирующие усилители 68-71, блоки 7225 75 перемножения. На выходе каждого
регулятора 7 и 8 возбуждения форми- . руется сигнал с частотой скольжения ротора, подаваемый на вход схемы управления тиристорами управляемого
30 преобразователя частоты. Соответст- вукхцим управлением амплитудой и фазой изменяющегося по гармоническому закону напряжения возбуждения и компенсацией электромагнитной инерционности цепи ротора осуществляется связь энергосистем с различающимися параметрами режима. При этом частота напряжения возбуждения каждой из АСМ поддерживается равной разности час-
40 тоты статора машины и частоты вращения вала.
Функции регулирования машин агрегата в данном случае могут быть описаны следующим образом:
35
и
50
, Ь, k,(Pt - Р,) +
+ k (О, -CJ,)
+ kj (РТ - P,)dt
+ (G)4-Qft) + ,+ k(U - U,) +
ь ч (Ut - и, )dt
(1)
55
и
Ч
81 Кг -MR) + krjP
«.(Oj.-WR ;j
h,..
dt kJ (Pt - P, )
ротора.
Преобразователь 36 координат (фиг. 7) состоит из блоков 52-59 перемножения и суммирующих усилите0 лей 60-63.
. Формирователь 37 проекций тока ротора .(фиг. 8) содержит интеграторы 64 и 65, инверторы 66 и 67, суммирующие усилители 68-71, блоки 725 75 перемножения. На выходе каждого
регулятора 7 и 8 возбуждения форми- . руется сигнал с частотой скольжения ротора, подаваемый на вход схемы управления тиристорами управляемого
0 преобразователя частоты. Соответст- вукхцим управлением амплитудой и фазой изменяющегося по гармоническому закону напряжения возбуждения и компенсацией электромагнитной инерционности цепи ротора осуществляется связь энергосистем с различающимися параметрами режима. При этом частота напряжения возбуждения каждой из АСМ поддерживается равной разности час-
0 тоты статора машины и частоты вращения вала.
Функции регулирования машин агрегата в данном случае могут быть описаны следующим образом:
5
и
, Ь, k,(Pt - Р,) +
+ k (О, -CJ,)
+ kj (РТ - P,)dt
+ (G)4-Qft) + ,+ k(U - U,) +
ь ч (Ut - и, )dt
(1)
и
Ч
81 Кг -MR) + krjP
«.(Oj.-WR ;j
h,..
dt kJ (Pt - P, )
t
+ h,k; j (P - Pa)dt + kg(U -
-U) SJ(U -U,)dt U,. (2) 5
где k - коэффициент усиления усилителя 27 (составляет значение на порядок больше kj); h,, выходные сигналы устройств
релейной защиты принимающи значения О или h,, логические отрицания сигна-
лов h, и h J - логическая сумма сигналов
h, и hj..
В нормальном режиме h h hj О, в результате чего ключи
23и 24 разомкнуты, а ключи 21, 22, 25, 26 замкнуты.
При потере возбуждения одной из фаз первой машины появляется логическая единица на выходе устройства релейной защиты первой машины, в результате чего h, hj 1 (по-прежнему h,j 0).
Теперь оказались замкнутыми ключи
24и 26, разомкнуты ключи 21, 22, 23 и 25, В канале активной мощности первой машины остается сигнал
eiot kj(co,-Wg),
s том же канале второй машины
oi + ke(U2-Wj) kg(pj - Р) +
+ k
;j()dt,
otL и ct
-04
02
есть суммы соответственно
сигналов otg, иcdo2 выходных сигналов интеграторов (в момент пос- тупления сигнала от устройства релейной защиты) мощности на первой машине и частоты вращения на второй машине.
Таким образом, первая машина ра- ботает в синхронном режиме, поддерживая заданное значение U|, вторая машина обеспечивает заданные значени PJ и uj и благодаря сигналу kj(cOt -WR) демпфирует колебания ча тоты вращения (О ц
При потере возбуждения одной из фаз второй машины появляется логи- ческая единица на выходе устройства
5
5
0
5
релейной защиты второй машины, в результате Чего h h, 1 (h , 0) .
В данном случае замкнуты ключи 21, 22 и 24, 23, разомкнуты ключи 25 к 26, В канале активной мощности первой машины получают сигнал
fc 060,- k,(Pt - P, ) + k,, J (Pt-P,)dt +
о + kj (03 )/ k{ (Wi -WR),
В TOM же канале второй машины kg ( ) + kg (P - Pg ) ,
Теперь уже вторая машина работает в синхронном режиме, поддерживая заданное значение. первая машина обеспечивает заданные значения Р, и. и, и благодаря сигналу ) демпфирует колебания частоты вращения 00({ ,
Таким образом, предлагаемое устройство для управления АС ЭМПЧ позволяет сохранить заданный переток мощности по межсистемной связи при потере возбуждения одной из фаз обмотки ротора, т.е. сохранить работоспособность АС ЭМПЧ.и, тем самым, повысить надежность функционирования межсистемной связи.
Кроме того, данное устройство по- вьш1ает надежность работы и самого
;АС ЭМПЧ, поскольку позволяет исключить переход на резервный регулятор синхронного режш4а (АРВ-С) вместо
.регулятора асинхронизированного режима (АРВ-А) при потере возбуждения одной из фаз ротора. Из приведенных на фиг. 9 и 10 графиков, где на фиг. 9 - процесс при потере возбуждения на машине, управляемой по мощности в соответствии с формулой (1), а на Аиг, 10 - в соответствии с формулой (2), следует, что переход от доаварийного установившегося процес са к послеаварийному протекает устойчиво.
Формула изобретения
Устройство для управления асинхро- низированным электромеханическим пре образователем частоты по авт. св. 1246239 п,1, отличающее- с я тем, что, с целью повышения нядежности функционирования межсистемной связи путем сохранения работоспособности асинхронизированных электромеханических преобразователей частоты при потере возбуждения одной из фаз обмотки ротора, в него дополнительно введены усилитель, элемент сравнения, сумматор, элемент ИЛИ, четыре размыкающих и два замыкающих ключа, причем с первого по четвертый размыкающий ключи включены между соответствующими входами регуляторов и соответственно задатчиком частоты, нелинейным элементом с зоной нечувствительности, зажимом для приема сигнала задания активной мощности и датчиком активной мощности первой машины, через первый замыкающий ключ аналоговый выход измерителя частоты вращения вала связан с входом интегрального преобразователя второго регулятора, через второй замыкающий ключ выход цополнительного усилителя связан с первым входом сумматора, с вторым входом которого связан датчик частоты первой энергосистемы,
выход сумматора подключен к соответствующему входу первого регулятора, вход дополнительного усилителя подключен к выходу элемента сравнения, входы которого связаны с датчиком
частоты второй энергосистемы и с
аналоговым выходом измерителя частоты вращения вала, входы элемента ИЛИ предназначены для подключения к выходам устройств релейной защиты от
потери возбуждения одной из фаз первой и второй машин, первый из указанных входов также соединен с управляющими входами третьего и четвертого размыкающих ключей, а второй - .
с управляющими входами вторых размыкающего и замыкающего ключей, выход элемента ИЛИ подключен к управляющим входам первых размыкающих и замыкающих ключей.
Фиа. 1
Фиг.З
J/L
L
Фи.5
49
.1
о),
чОО
rvf
:J«,;tf/ f
cosugt-jsiniatt
49
-,5Г
so
tff -
, -IФи. 7
Ul-COSifcfO
Фие.В
ff -fff
/„SB
I
г
.5 /
0,5
О
-0,5
-1 -1,5
-г
/SB
0,5
-0.5
-05
-1
-1
l2
