1
Изобретение относится к электроэнергетике, а именно к устройствам для гибкой связи энергосистем с различающимися частотами.
Цель изобретения - повьщгение динамической устойчивости связываемых энергосистем и надежности электроснабжения потребителей в аварийных режимах.
На фиг.I представлена схема предлагаемого устройства; на фиг.2 - схема регулятора возбуждения; на фиг.3- схема второго блока управления; на фиг.4 - схема первого блока управления; на фиг.5 - блок-схема датчика предельной частоты; на фиг.6,7 - характеристики переходного процесса устройства при аварийных возмущениях в одной из связываемых энергосистем.
Устройство для связи двух энергосистем 1 и 2 состоит из двух асинх- ронизированных синхронных мащин (АСМ) 3 и 4 с жестко соединенными валами и турбиной 5, статорные обмотки которых подключены к соответствующим энергосистемам, а роторные обмотки .с датчиками 6 и 7 тока ротора соот «-si
со
3147
ветственно через управляемые преобразователи 8 и 9 частоты подключены соответственно к выходам регуляторов 10 и 11 возбуждения, входы которых соединены с выходами датчика 12 углового положения и скорости вращения вала, датчика частоты своей энергосистемы 13 или 14, датчика 6 или 7 тока ротора о Кроме того, входы регу- лятора 10 соединены с выходами суммирующего элемента 15 и интегрирующего элемента 16, вход которого соединен вторьм выходом суммирующего элемента 15j а вход последнего соединен с датчиком 17 напряжения энергосистемы 1. Последующие входы регулятора 10 соединены соответственно с выходами суммирующего элемента 18, интегрирующего элемента 19, с одним из выходов блока 20 управления, второй выход последнего присоединен к второму входу суммирующего элемента 18, первый вход которого соединен с датчиком 21 активной мощности энер- госистемы 1. Вход интегрирующего элемента 19 соединен с вторым выходом суммирующего элемента 18. Входы блока 20 управления соединены с выходами датчиков 21 и 22 активной мощное- ти энергосистем 1 и 2 соответственно. Задатчика 23 активной мощности, датчика 24 реактивной мощности энергосистемы 1, датчиков 25 и 26 сброса и наброса мощности энергосистемы 2 и с вторым выходом регулятора 10 возбуждения.
Входы регулятора 11 возбуждения АСМ 4 соединены с выходами суммирующего элемента 27 и интегрирующе- го элемента 28, вход которого соединен с вторым выходом суммирующего элемента 27, а вход последнего соединен с датчиком 29 напряжения энергосистемы, 2, Последующие входы регуля- тора 11 возбуждения соединены соответственно с выходами суммирующего элемента 30, интегрирующего элемента 31, блока 32 управления.
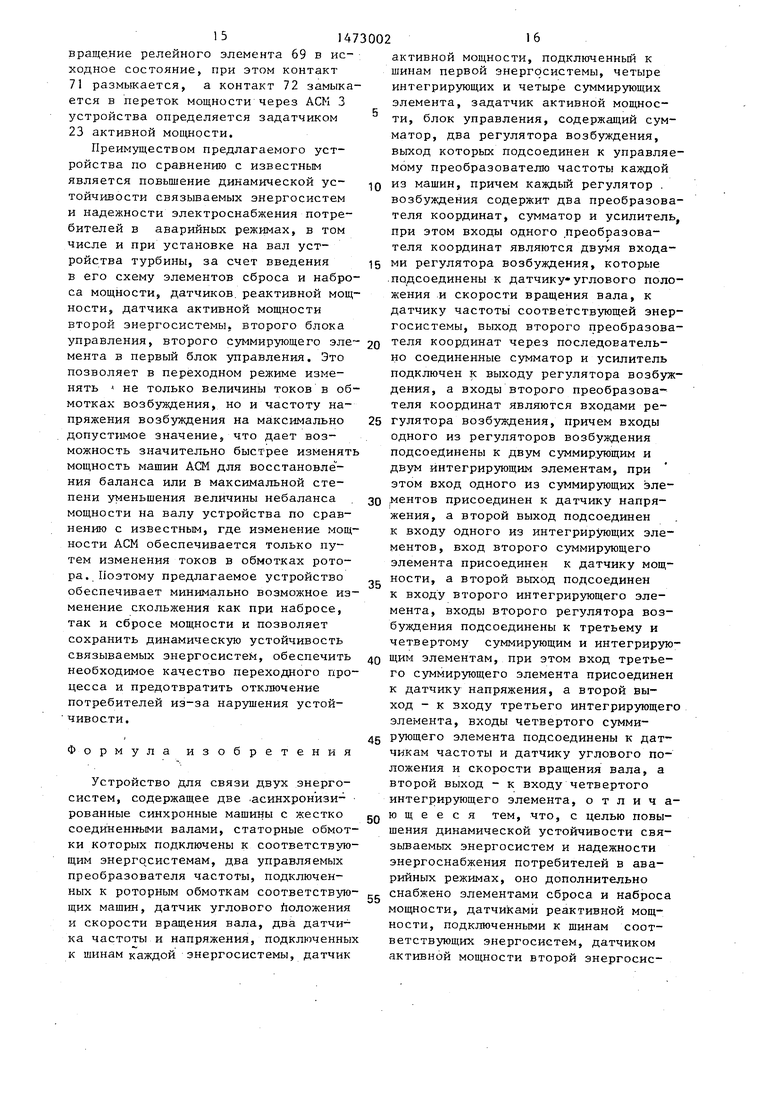
Вход интегрирующего элемента 31 соединен с вторым выходом суммирующего элемента 30, а входы последнего соединены с датчиками 13 и 14 частоты энергосистем 1 и 2 соответственно и датчиком 12 углового поло- жения и скорости вращения вала. Входы блока 32 управления соединены с выходами датчиков 21 и 22 активной мощности энергосистем 1 и 2 соответственно, датчика 33 реактивной мощности энергосистемы 2, датчиков 34 и 35 сброса и наброса мощности энергосистемы 1 И с вторым выходом регулятора 11 возбуждения.
Регулятор 10 (или 11) возбуждения (фиг.2) содержит преобразователи 36 и 37 координат, сумматор 38, усилитель 39. На входы преобразователя 36 поступают сигналы с датчика 12 углового положения и скорости вращения вала и с датчика 13 (или 14) частоты энергосистем I (или 2), с выхода преобразователя 36 сигнал подается в блок 20 (или 32) управления, с выхода которого подается на вход преобразователя 37. На последующие входы преобразователя 37 поступают суммар- ньй сигнал с выходов элементов 15, 16 и суммарньй сигнал с выходов элементов 18 и 19 (или суммарный сигнал от элементов 27, 28 и суммарный сигнал от элементов 30 и 31). Гармонические сигналы управления частоты скольжения АСМ 3 (или 4), получаемые на выходе преобразователя 37, суммируются в сумматоре 38 с сигналом od- ратной связи по току ротора от датчиков 6 (или 7). Сигнал с выхода сумматора 38 поступает на вход усилителя 39, на выходе которого формируется управляющий ;игнал напряжения возбуждения, поступающий на вход управляемого преобразователя 8 (или 9) частоты.
Блоки 32 И; 20 управления (фиг.З, 4) содержат элементы 40-43 сравнения, релейные элементы 44-49, логические.
элементы И 50-53
элементы 54 и 55
памяти, логический элемент 56 ИЛИ, дифференцирующий элемент 57, суммирующий элемент 58, инвертор 59, датчик 60 предельной частоты, размыкающие контакты 61-64 и замыкающие контакты 65-68 релейных элементов 45- 49 соответственно. Один из входов блока 32 управления соединен с входом элемента 40 сравнения, выход последнего соединен с одним из входов релейного элемента 44, выход которого соединен с одним из входов, двух логических элементов 50 и 51, второй вход элемента 50 и второй вход элемента 51 через инвертор 59 присоеди-- нен к второму входу блока 32 управления. Выход элемента 50 соединен с входом релейного элемента 45, а выход элемента 51 - с входом релейного
514
элемента 46. Третий вход блока 32 управления присоединен к входу элемента 41 сравнения, выход которого соединен с одним из входов релейного элемента 47, выход которого соединен с одним из входов двугс логических элементов 52 и 53. Второй вход элемента 52 присоединен к второму входу блока 32 управления, второй вход элемента 53 присоединен к второму входу инвертора 59. Выход элемента 52 соединен с входом релейного элемента 48, а выход элемента 53 сое
Входы релейного элемента 69 присоединены к выходам элементов 40, 41 сравнения. Входы суммирующего элемента 70 блока 20 управления соединены
динен с входом релейного элемента 49. 15 с первым и седьмым входами блока 20, Вход элемента 54 памяти присоединен а выход суммирующего элемента 70 че- к четвертому входу блока 32 управления, а вход, элемента 55 памяти присорез замыкающие контакты 71 релейного элемента 69 присоединен к второму выходу блока 20 управления, который
единен к пятому входу блока 32. Вхорез замыкающие контакты 71 релейного элемента 69 присоединен к второму выходу блока 20 управления, который
ды суммирующего элемента 58 присоеди- 2о через размыкающий контакт 72 релейно- иены к выходам элементов 54 и 55 памя- го элемента 69 соединен с седьмым
ти и четвертому входу блока 32, выход суммирующего элемента 58 присоединен к одному из входов элемента 42 сравнения, второй вход которого присоединен к пятому входу блока 32. Выход элемента 42 сравнения присоединен к второму входу релейного элемента 47 и к одному из входов логичесвходом блока 20, который соединен с задатчиком 23 активной мощности, Второй выход блока 20 управления присое- 25 динен к второму входу суммирующего элемента 18. Элементы сброса 25 и наброса 26 мощности энергосистемы 2, датчик 22 активной мощности шин энергосистемы 2 присоединены соответствходом блока 20, который соединен с задатчиком 23 активной мощности, Второй выход блока 20 управления присое- 25 динен к второму входу суммирующего элемента 18. Элементы сброса 25 и наброса 26 мощности энергосистемы 2, датчик 22 активной мощности шин энергосистемы 2 присоединены соответсткого элемента 56, второй вход которо- ЗО венно к первому, третьему и четвертого через последовательно соединенны му входам блока 20, к второму и пято- элемент сравнения 43 и дифференцируюму входам которого присоединены соответственно датчики 24 реактивной и 21 активной мощностей шин энергосисщий элемент 57 присоединен к пятому входу блока 32 управления. Выход элемента 56 присоединен к второму входу релейного элемента 4,4 Один из выходов датчика 60 предельной частоты через параллельно соединенные замыкающие контакты 65 и 68 релейных элементов 45 и 49 соответственно, а второй выход через параллельно соединенные замыкающие контакты 66 и 67 релейных элементов 46, 48 соответственно подключены к.выходу блока 32 управления, который через цепочку последовательно соединенных размыкающих контактов 61-64 релейных элементов 45, 46 и 48, 49 соответственно присоединен к шестому входу блока
Механическая мощность у турбины 5, преобразованная машинами 3 и 4 в
32 управления, при этом вьпсод блока 50 электрическую, может в зависимости 32 присоединен к входу, а шестой вход от режима работы объединенной энергосистемы передаваться одновременно в обе энергосистемы -1 и 2 или только в одну из них. Значение активной 55 мощности, передаваемое через устройблока 32 присоединен к второму выходу регулятора 11 возбуждения Элементы 34 сброса 35 наброса мощности энергосистемы 1, датчик 21 активной мощности шин энергосистемы 1 присоединены соответственно к первому, третьему и четвертому входам блока 32 управления, к второму и пятому вхоство, задается задатчиком 23 активной мощности, сигнал с выхода которого через размыкающий контакт 72 релейного элемента 69 пос-тупает на вто
дам которого присоединены соответственно датчики реактивной 33 и активной 22 мощности шин энергосистемы 2 .
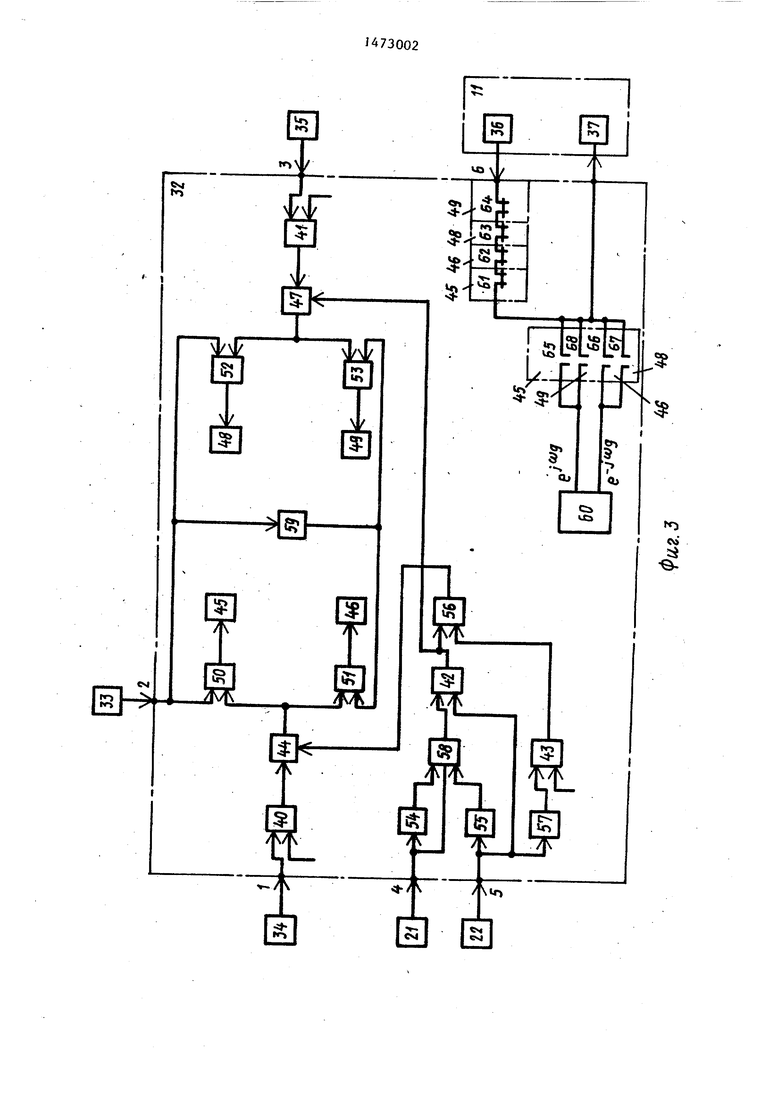
Блок 20 управления (фиг.4) дополнительно содержит релейный элемент 69, суммирующий элемент 70, нормально разомкнутые контакты 71 и нормально замкнутые контакты 72 релейного элемента 69.
Входы релейного элемента 69 присоединены к выходам элементов 40, 41 сравнения. Входы суммирующего элемента 70 блока 20 управления соединены
с первым и седьмым входами блока 20, а выход суммирующего элемента 70 че-
с первым и седьмым входами блока 20, а выход суммирующего элемента 70 че-
рез замыкающие контакты 71 релейного элемента 69 присоединен к второму выходу блока 20 управления, который
через размыкающий контакт 72 релейно- го элемента 69 соединен с седьмым
входом блока 20, который соединен с задатчиком 23 активной мощности, Второй выход блока 20 управления присое- динен к второму входу суммирующего элемента 18. Элементы сброса 25 и наброса 26 мощности энергосистемы 2, датчик 22 активной мощности шин энергосистемы 2 присоединены соответственно к первому, третьему и четвертому входам блока 20, к второму и пято-
ЗО венно к первому, третьему и четвертому входам блока 20, к второму и пято
му входам которого присоединены соответственно датчики 24 реактивной и 21 активной мощностей шин энергосис35 темы 1. Один из выходов блока 20 присоединен к входу, а шестой вход блока 20 присоединен к второму выходу регулятора 10 возбуждения.
Датчик 60 предельной частоты, по40 казанный на фиг.5 содержит синхронный генератор частоты 73, выходы которого соединены со входами двух интеграторов 74, 75, на выходе последних получают гармонические сигналы -iW9
е в соответственно.
В нормальных режимах устройство работает следующим образом.
Механическая мощность у турбины 5, преобразованная машинами 3 и 4 в
45 е ,
50 электрическую, может в зависимости от режима работы объединенной энергосистемы передаваться одновременно в обе энергосистемы -1 и 2 или только в одну из них. Значение активной 55 мощности, передаваемое через устройство, задается задатчиком 23 активной мощности, сигнал с выхода которого через размыкающий контакт 72 релейного элемента 69 пос-тупает на вто7 . 14
рой вход сза-1мирующего элемента 18, на первый вход последнего поступает сигнал с датчика 21 активной мощности шин энергосистемы 1. С одного из выходов суммирующего элемента 18 и с выхода интегрирующего элемента 19 на вход последнего поступает сигнал с второго выхода элемента 18, а с одного из выходов суммирующего элемента 5j на входы которого поступа ют сигналы с датчика 17 напряжения энергосистемы .1 и заданное значение напряжения на шинах энергосистемы 1 и с выхода интегрирзтощего элемента 16, на вход последнего поступает сигнал с второго выхода суммирующего элемента 15, на входы преобразователя
37 координат регулятора 10 возбуждения
0
5
8
формируется управляющий сигнал напряжения возбуждения, поступающий на вход управляемого преобразователя 8 частоты., с выхода которого подводится к роторным обмоткам возбуждения АСМ 3. ,
, С одного из выходов суммирующего элемента 30, в котором формируется задание на требуемую частоту вращения вала устройства в зависимости от отклонения частот связьгоаемых энергосистемы 1 и 2 как полусумма частот энергосистем J и 2, на входы которого поступают сигналы с датчиков 13 и 14 частоты энерх осистемы 1 и 2, датчика 12 углового положения и скорости вращения вала и с выхода интегрирующего элемента 31, на.вход пос



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1598041A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1576976A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты (его варианты) | 1984 |
|
SU1246239A1 |


Изобретение относится к области электротехники. Цель изобретения - повышение динамической устойчивости связываемых энергосистем и надежности электроснабжения потребителей в аварийных режимах. Устройство содержит две асинхронизированные синхронные машины, связанные общим валом. В нормальном режиме на одну из асинхронизированных синхронных машин возлагаются функции обеспечения заданного перетока активной мощности, а на вторую - регулирование требуемой скорости вращения вала в зависимости от отклонения частот связываемых энергосистем. На обе машины возложены функции поддержания заданного уровня напряжения на шинах энергосистем. В аварийных режимах при набросах мощности выше допустимой устройство изменяет не только величины токов в обмотках возбуждения асинхронизированных синхронных машин, но и частоту напряжения возбуждения на максимально допустимое значение. Это дает возможность быстро изменять мощность машин для восстановления баланса или в максимальной степени уменьшения величины небаланса, что приводит к повышению динамической устойчивости связываемых энергосистем. 7 ил.
поступают сигналы, пропорциональные от-|20 леднего поступает сигнал с второго
kлoнeнию перетока активной мощности через АСМ 3 устройства от заданного значения и интегралу этого отклонения, отклонению напряжения на шинах энергосистемы 1 от заданного значения и интегралу этого отклонения, т,ео при работе устройства элементы 15 и 16 обеспечивают пропорционально-интегральные регулирование напряжения на шинах энергосистемы 1, элементы 18 и 19 - пропорционально-интегральное регулирование перетока активной мощности через устройство.
На входы преобразователя 36 координат регулятора 10 возбуждения поступают сигналы с датчика.12 углово-. го положения и скорости вращения, вала и с датчика 13 частоты энергосистемы 1. С выхода преобразователя 36 регулятора 10 гармонический сигнал частоты скольжения, равной разности частот энергосистемы 1-и частоты вращения вала устройства, поступает на шестой вход блока 20 управления и через Цепочку нормально замкнутых контактов 61-64 обесточенных релейных элементов 45, 46 и 48, 49 соответственно подается на вход преобразователя 36 координат регулятора . 10 возбуждения, куда поступают также суммарные сигналы с выходов элементов 15, 16 и 18, 19. Гармонические сигналы управления частоты скольжения АСМ 3, получаемые на выходе преобразователя 37, суммируются в сумматоре 38 сигналом обратной связи по току ротора от датчика 6, сигнал с выхода сумматора 38 поступает на , вход усилителя 39, на выходе которого
выхода суммирующего элемента 30, а одного из выходов сзшмирующего элемен та 27, на вход которого поступают сигнал с датчика 29 напряжения энер
25 госистемы 2 и заданное значение нап жения на шинах энергосистемы 2 и с выхода интегрирующего элемента 28, на вход которого поступает сигнал с второго выхода элемента 27, на вход
30 преобразователя 37 координат регуля тора 11 возбуждения поступают сигна лы, пропорциональные отклонению ско рости вращения вала от требуемого значения и интегралу этого отклоне25 ния, отклонению напряжения на шинах энергосистемы 2 от заданного значения и -интегралу этого отклонения, таким образом элементы 27 и 28 обес печивают пропорционально-интеграль4Q ное регулирование напряжения на шинах энергосистемы 2, элементы 30 и 31 - пропорционально-интегральное регулирование .скорости вращения вала устройства,
д5 На входы преобразователя 36.регу лятора 11 возбуждения поступают сиг налы с датчика 12 углового положения и скорости вращения вала и с да чика 14 частоты энергосистемы 2. С выхода преобразователя 36 гармониче кий сигнал частоты скольжения, рав ной разности частот энергосистемы 2 и частоты вращения вала устройства, поступает на шестой вход блока 32 уп
jg равления и через цепочку размыкающи контактов 61-64 обесточенных релейн элементов 46, 45 и 48, 49 подается на вход преобразователя 37 координа регулятора 11, куда поступают также
50
выхода суммирующего элемента 30, ас одного из выходов сзшмирующего элемента 27, на вход которого поступают сигнал с датчика 29 напряжения энер5 госистемы 2 и заданное значение напряжения на шинах энергосистемы 2 и с выхода интегрирующего элемента 28, на вход которого поступает сигнал со второго выхода элемента 27, на входы
0 преобразователя 37 координат регулятора 11 возбуждения поступают сигналы, пропорциональные отклонению скорости вращения вала от требуемого значения и интегралу этого отклоне5 ния, отклонению напряжения на шинах энергосистемы 2 от заданного значения и -интегралу этого отклонения, таким образом элементы 27 и 28 обеспечивают пропорционально-интегральQ ное регулирование напряжения на шинах энергосистемы 2, элементы 30 и 31 - пропорционально-интегральное регулирование .скорости вращения вала устройства,
5 На входы преобразователя 36.регулятора 11 возбуждения поступают сигналы с датчика 12 углового положения и скорости вращения вала и с датчика 14 частоты энергосистемы 2. С выхода преобразователя 36 гармонический сигнал частоты скольжения, равной разности частот энергосистемы 2 и частоты вращения вала устройства, поступает на шестой вход блока 32 упg равления и через цепочку размыкающих контактов 61-64 обесточенных релейных элементов 46, 45 и 48, 49 подается на вход преобразователя 37 координат регулятора 11, куда поступают также
0
суммарные сигналы с выходов элементов 27, 28 и 30, 31. Гармонические сигйалы управления частоты скольжения АСМ 4, получаемые на выходе преобразователя 37, суммируются в сумматоре 38 с сигналом обратной связи по .току ротора от датчика 7. Сигнал с выхода сумматора 38 поступает на вхо усилителя 39, н выходе которого формируется управляющий сигнал напряжения возбуждения, поступающий на вход управляемого преобразователя 9 частоты, с выхода которого подводится к роторным обмоткам возбуждения АСМ 4.
Итак, на АСМ 3 возлагаются функции обеспечения заданного перетока активной мощности, на АСМ 4 - регулирование требуемой скорости вращения вала в зависимости от отклонения частот связываемых энергосистем на обе АСМ 3 и 4 - поддержание заданного уровня напряжения на шинах энергосистем и 2.
В аварийных режимах устройство работает следующим образом.
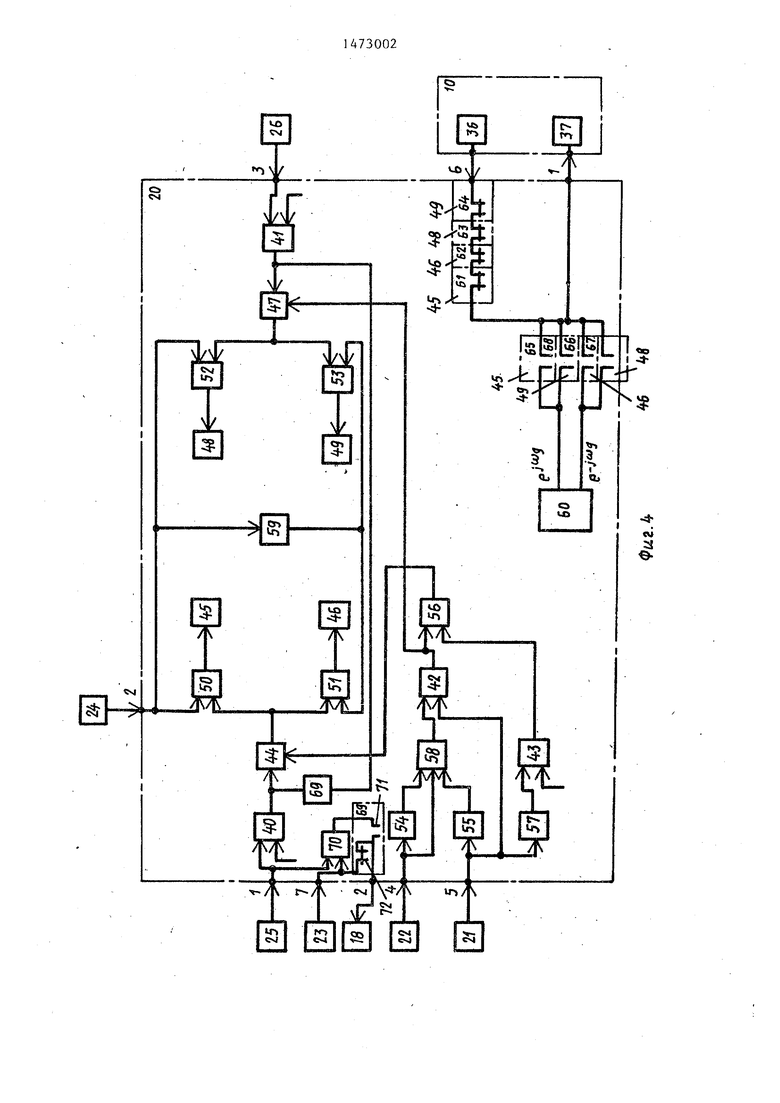
Например, при KopotKOM замыкании энергосистеме 1 в момент времени t, электромагнитная мощность АСМ 3 резко снижается. Величина сброса мощности &РС, фиксируется элементом 34 сброса мощности энергосистемы 1, Сигнал с выходца элемента 34 поступае в элемент 40 сравнения блока 32 управления, где сравнивается с вели- чиной сброса мощности,допустимой по условию сохранения устойчивости. При этом, если величина &РС, больше допустимой величины сброса по условию сохранения устойчивости, то с выхода элемента 40 сигнал поступает на первый вход релейного элемента 44. Элемент 44 срабатьшает, подавая сигналы на первые входы логических элементов 50 и 51. Срабатывание элементов 50 и 51 зависит от знака величины реактивной мощности О энергосистемы 2. Например, если Q О, то на вход элемента 50 поступает положительный сигнал от.датчика 33 реактивной мощности энергосистемы 2 и сигнал от элемента 44, а на выходе появляется сигнал, поступающий в релейный элемент 45. Элемент 45 срабатывает, размыкая свой размьп ающий кон- такт 61 и замыкая замыкающий контакт 65. При этом снимается управляющий сигнал с выхода преобразователя 36
координат регулятора 11 возбуждения, а на вход преобразователя 37 координат регулятора 11 поступает сигнал е от датчика 60 предельной частоты. На последующие входы преобразо- вателя 37 поступают также суммарные сигналы с выходов элементов 27, 28 и 30, 31. На выходе преобразователя
10 37 появляется управляющий сигнал на изменение предельно возможной частоты напряжения возбуждения АСМ 4, который суммируется в сумматоре 38 с сигналом обратной связи по току рото15 ра от датчика 7, суммарный сигнал поступает в усилитель 39, с выхода которого поступает в управляемый преобразователь 9 частоты, с выхода последнего подводится к роторным обмот0 кам возбуждения АСМ 4. Этим обеспечивается поворот вектора напряжения возбуждения АСМ 4 относительно вектора напряжения энергосистемы 2 и соответственно увеличение активной
5 мощности АСМ 4. Элементы 54 и 55 периодически запоминают мощности нормального установившегося режима, поэтому в рассматриваемом переходном режиме на выходе элементов 54 и 55
0 имеются сигналы, пропорциональные Доаварийным значениям мощностей Р; АСМ 3 и 4 соответственно, по30
0
Ступающие на вход суммирующего элемента 58, куда поступает также текущее значение мощности АСМ 3 выходе элемента 58 появляется сигнал (РЗО )j пропорциональный доава- рийным мощностям обеих АСМ и текущему значению мощности АСМ 3, поступающий на первый вход элемента 42 сравнения, на второй вход которого поступает сигнал с выхода датчика 22 о текзтцем значении мощности АСМ 4 Р
4-t
5
0
Когда .
значение Р. сравняется со значением (Pjg +Р, ) , что свидетельствует о возникшем балансе мощностей на валу устройства, то на выходе элемента 42 появляется сигнал, поступающий на вход логического элемента 56, с в ыхода которого сигнал поступает на второй вход релейного элемента 44, который возвращается в исходное положение, снимается сигнал с элемента 50 и релейный элемент 45 приходит в g исходное состояние, тем самым размыкая свой контакт 65 и замыкая контакт 61, отключая от регулятора 11 возбуждения датчик 60 предельной частоты и подключая через цепочку
11
размыкающих контактов 61, 62, 63, 64 релейных элементов 45, 36, 48, 49 выход преобразователя 36 координат регулятора 1 к входу преобразовател 37 регулятора 11, на выходе которого формируется гармонический сигнал управления частоты скольжения аналогично нормальному режиму.
Таким образом, временное изменение частоты напряжения возбуждения позволяет восстановить баланс мощности на валу устройства, однако не всегда в аварийных режимах изменением частоты напряжения возбуждения можно восстановить баланс мощности
Известно, что при компенсации электромагнитной инерционности роторов АСМ электромагнитная мощность АСМ определяется по уравнению
ЬЧ Е . л
Р
sinl
(О
s
где Е - ЭДС, наведенная потоком ротора в обмотке статора; и - напряжение на шинах энергосистемы;
угол между вектором ЭДС в об- мотке статора и вектором на- ; пряжения шин энергосистемы Величины ЭДС Е и угла S определяются значением напряжения возбуждения, приложенным к роторным обмоткам возбуждения АСМ, и углом вектора напряжения возбуждения UP относительно вектора напряжения энергосистемы и . Поэтому при изменении угла вектора U, относительно вектора 11 изменяется Е и угол 5 , что согласно () приводит к изменению активной мощ20 на валу устройства. Оставшаяся величина небаланса мощности устраняется по цепям пропорционально-интегрально го регулирования заданного перетока активной мощности через ycтpoйctвo
25 и требуемой частоты вращения вала устройства.
При отключении КЗ получается на- брос мощности ЛРц, на АСМ 3. Данная величина наброса фиксируется блоком
30 35 наброса мощности энергосистемы , сравнивается в элементе 41 сравнения с заданной величиной, определяемой условиями устойчивости или качеством переходного процесса Если величина
22 наброса мощности АPJ, больше заданной величины, то на выходе элемента 41 появляется управляющий сигнал на срабатывание релейного элемента 47, которьй срабатывает, подавая сигнал
ности АСМ..При активная мощность о на логические элементы 52 и 53. Сра- АСМ принимает максимальное значение о батывание элементов 52 и 53 зависит При дальнейшем увеличении
CBbmie
90 активная мощность АСМ начинает уменьшаться, что приведет к еще боль- шему небалансу мощности на валу устройства.
SP достигает 90,
а возникший небаланс не ликвидируется, то дальнейший поворот вектора и, относительно вектора Uj,, а следовательно, и поворот вектора Е относительно вектора U, не приводит к увеличению активной мощности АСМ, а наоборот увеличивает небаланс. Чтобы этого непроизошло, на второй вход логического элемента 56 поступает сигнал с выхода элемента 43 сравнения, на вход последнего поступает сигнал с дифференцирующего элемента 57,
от знака величины реактивной мощности энергосистемы 2. Поскольку на элемент 52 поступает положительный нал от датчика 33, то на выходе элемента 52 появляется управляющий сигнал на срабатывание релейного элемента 48. Элемент 48 срабатывает, размыкая свой размыкающий контакт 63 и
5Q замыкая замыкающий, контакт 67. При этом снимается управляющий сигнал с выхода преобразователя 36 координат регулятора 11 возбуждения, а на вход преобразователя 37 координат регулятора 11 поступает сигнал от датчика предельной частоты. На последующие входы блока 37 поступают также суммарные сигналы с выходов элементов 27, 28 и 30, 31. На выходе
55
1473002
12
который дифференцирует текущее значение мощности АСМЧ Р. с выхода датчика 22. В элементе 43 значение
dP4t
dt сравнивается наибольшим значенипроизводной,
Т7 «ifP4t
Если:g
dt
этой ве
личины, т.е.
-5Г .
ЭТО
значит что
мощность АСМ 4 достигла максимального значения и на выходе элемента 43 появляется сигнал, поступающий на второй вход элемента 56, с выхода которого сигнал возвращает в исходное положение релейный элемент 44оТаким образом, с максимальным быстродействием можно ликвидировать или уменьшить возникший небаланс мощности
на валу устройства. Оставшаяся величина небаланса мощности устраняется по цепям пропорционально-интегрального регулирования заданного перетока активной мощности через ycтpoйctвo
и требуемой частоты вращения вала устройства.
При отключении КЗ получается на- брос мощности ЛРц, на АСМ 3. Данная величина наброса фиксируется блоком
35 наброса мощности энергосистемы , сравнивается в элементе 41 сравнения с заданной величиной, определяемой условиями устойчивости или качеством переходного процесса Если величина
наброса мощности АPJ, больше заданной величины, то на выходе элемента 41 появляется управляющий сигнал на срабатывание релейного элемента 47, которьй срабатывает, подавая сигнал
на логические элементы 52 и 53. Сра- батывание элементов 52 и 53 зависит
о на логические элементы 52 и 53. Сра- батывание элементов 52 и 53 зависит
от знака величины реактивной мощности энергосистемы 2. Поскольку на элемент 52 поступает положительный нал от датчика 33, то на выходе элемента 52 появляется управляющий сигнал на срабатывание релейного элемента 48. Элемент 48 срабатывает, размыкая свой размыкающий контакт 63 и
5Q замыкая замыкающий, контакт 67. При этом снимается управляющий сигнал с выхода преобразователя 36 координат регулятора 11 возбуждения, а на вход преобразователя 37 координат регулятора 11 поступает сигнал от датчика предельной частоты. На последующие входы блока 37 поступают также суммарные сигналы с выходов элементов 27, 28 и 30, 31. На выходе
55
блока 37 появляется управляющий сигнал на изменение предельно возможной частоты напряжения возбуждения АСМ А, который суммируется в сумматоре 38 с сигналом обратной связи по току ротора от датчика 7, суммарньш сигнал поступает в усилитель 39, с выхода которого поступает в управляемый преобразователь 9 частоты, с выхода последнего подводится к роторным обмоткам возбуждения АСМ 4. Этим обеспечивается поворот вектора напряжения возбуждения АСМ 4 относительно вектора напряжения энергосистемы 2 и соответственно уменьшение активной мощности АСМ 4. Уменьшение мощности АСМ 4 происходит до тех пор, пока на релейный элемент 47 не придет управляющий сигнал с блока 42 на возвраще- 2о описанному
Если, н ной мощнос тельное, то - 50 и 52 по налы, и че ческие эле ложительны сигнал на
1Q ствует, а
сигнал на та 51; при 3 отсутств мента 52 и
15 сигнал на
Поэтому ный элемен ности - ре тальном ра
ние релейного элемента 47 в исходное состояние. Тем самым снимается сигнал с логического элемента 52 и релейный элемент 48 возвращается в исходное состояние, размыкая свой контакт -67 и .замыкая контакт 63, отключая от регулятора 11 возбуждения датчик 60 предельной частоты и подключая через цепочку размыкающих контактов 61-64 релейных элементов 45, 46 и 48, 49 выход преобразователя 36 координат регулятора 11 к входу преобразователя 37 регулятора 11, на выходе которого формируется гармонический сигнал управления частот скольжения аналогично нормальному режиму.
Управляющий сигнал с элемента 42 достигает элемента 47 в том случае, если на валу устройства наступит баланс мощности, т.е. когда сравняется в элементе 42 сравнения текущее значение мощности АСМ 4 Р4. датчика 22 со значением ( ) с выхода суммирующего элемента 58, а входы элемента 58 поступают сигалы с выходов элементов 54 и 55 па- яти, пропорциональные доаварийным начениям мощностей Р , Р,, АСМ и 4 соответственно, и cигнaлJПpo- орциональный текущему значению мощ25
При пов энергосисте аналогично возмущении этом управл 20 управлен дополнитель переток мощ ства на вре 30 Ос тцествляе При Kj в э выхода элем энергосисте рующий элем также сигна ной мощност 70 получает чины сброса 2 АРс и за в нормально
35
40
на сброса
ости АСМ 3 Р
э-t
Элементы 54 и 55
величины сб нения устой релейный эл
45 контакт 72 самым подав 18 новое зад мощности че на время во
50 Р сн отражается в АСМ 4, данны фиксируется ности. Если
памяти периодически запоминают мощности нормального установившегося
режима с датчиков 21 и 22
Такое управление мощностью обес, печивает плавный переход к нормальному установившемуся режиму без боль- шого затормаживания машины.
1473002
описанному
Если, например, значение реактивной мощности Q с датчика 33 отрицательное, то на логические элементы 50 и 52 поступают отрицательные сигналы, и через инвертор 59 на логические элементы 51 и 53 поступают положительные сигналы, поэтому при К, сигнал на выходе элемента 50 отсутствует, а появляется управляющий
сигнал на выходе логического элемента 51; при набросе мощности на АСМ 3 отсутствует сигнал на выходе элемента 52 и появляется управляющий
сигнал на выходе элемента 53.
Поэтому срабатывает при Kg релейный элемент 46, а при набросе мощности - релейный элемент 49. В остальном работа устройства аналогична
При повреждении вызванном К, в энергосистеме 2, устройство работает аналогично его работе при аварийном возмущении в энергосистеме I, но при этом управление осуществляет блок 20 управления. При.этом происходит дополнительное изменение задания на переток мощности через АСМ 3 устройства на время переходного процесса. Ос тцествляется это образом, При Kj в энергосистеме 2 сигнал с выхода элемента 25 сброса мощности энергосистемы 2 поступает в суммирующий элемент 70,.куда поступает также сигнал от задатчика 23 активной мощности и на выходе элемента 70 получается суммарный сигнал величины сброса мощности энергосистемы 2 АРс и задания перетока мощности в нормальном режиме. Если величи
на сброса ЛРс больше допустимой
величины сброса по условиям сохранения устойчивости, то срабатывает релейный элемент 69, размыкая свой
45 контакт 72 и замыкая контакт 71, тем самым подавая в суммирующий элемент 18 новое задание перетока активной мощности через АСМ 3 устройства, на время возмущения в энергосисте50 Р снятии возм тцения, которое отражается в набросе мощности на АСМ 4, данный наброс мощности ЛРц фиксируется элементом 26 наброса мощности. Если величина наброса мощносgg ти ЬРн больше заданной величины, определяемой условиями устойчивости или качеством переходного процесса, то элемент 41 сравнения срабатывает и подает управляющий сигнал на воз15147
вращение релейного элемента 69 в исходное состояние, при этом контакт 71 размыкается, а контакт 72 замыкается в переток мощности через АСМ 3 устройства определяется задатчиком 23 активной мощности.
Преимуществом предлагаемого устройства по сравнению с известным является повьоиение динамической устойчивости связьшаемых энергосистем и надежности электроснабжения потребителей в аварийных режимах, в том числе и при установке на вал устройства турбины, за счет введения в его схему элементов сброса и набро- са мощности, датчиков, реактивной мощности, датчика активной мощности второй энергосистемы, второго блока
управления, второго сзпммирующего эле- 20 теля координат через последовательмента в первый блок управления. Это позволяет в переходном режиме изменять не только величины токов в обмотках возбуждения, но и частоту напряжения возбуждения на максимально допустимое значение, что дает возможность значительно быстрее изменять мощность машин АШ для восстановле - ния баланса или в максимальной степени уменьшения величины небаланса мощности на валу устройства по сравнению с известным, где изменение мощности АСМ обеспечивается только путем изменения токов в обмотках ротора. Поэтому предлагаемое устройство обеспечивает минимально возможное изменение скольжения как при набросе, так и сбросе мощности и позволяет сохранить динамическзто устойчивость связываемых энергосистем, обеспечить необходимое качество переходного процесса и предотвратить отключение потребителей из-за нарушения устой- чивости.
Формула изобретения
Устройство для связи двух энергосистем, содержащее две .асинхронизи- рованные синхронные машины с жестко соединенными валами, статорные обмотки которых подключены к соответствующим энергосистемам, два управляемых
но соединенные сумматор и усилитель подключен к выходу регулятора возбуж дения, а входы второго преобразователя координат являются входами ре25 гулятора возбуждения, причем входы одного из регуляторов возбуждения подсоединены к двум суммирующим и двум интегрирующим элементам, при этом вход одного из суммирующих эле30 ,ментов присоединен к датчику напряжения, а второй выход подсоединен к входу одного из интегрирующих элементов, вход второго суммирующего элемента присоединен к датчику мощ2g ности, а второй выход подсоединен к входу второго интегрирующего элемента, входы второго регулятора возбуждения подсоединены к третьему и четвертому суммирующим и интегрирую
40 Щим элементам, при этом вход третьего суммирующего элемента присоединен к датчику напряжения, а второй выход - к входу третьего интегрирующег элемента, входы четвертого сумми45 рующего элемента подсоединены к датчикам частоты и датчику углового положения и скорости вращения вала, а второй выход - к входу четвертого интегрирующего элемента, отлича ющееся тем, что, с целью повышения динамической устойчивости свя- зьюаемых энергосистем и надежности энергоснабжения потребителей в аварийных режимах, оно дополнительно
50
45 рующего элемента подсоединены к датчикам частоты и датчику углового положения и скорости вращения вала, а второй выход - к входу четвертого интегрирующего элемента, отлича ющееся тем, что, с целью повышения динамической устойчивости свя- зьюаемых энергосистем и надежности энергоснабжения потребителей в аварийных режимах, оно дополнительно
преобразователя частоты, подключенных к роторным обмоткам соответствую- снабжено элементами сброса и наброса щих машин, датчик углового положения мощности, датчиками реактивной мощ- и скорости вращения вала, два датчи- ности, подключенными к шинам соот- ка частоты и напряжения, подключенных ветствующих энергосистем, датчиком к шинам каждой энергосистемы, датчик активной мощности второй энергосис16
активной мощности, подключенный к шинам первой энергосистемы, четыре интегрирующих и четыре суммирующих элемента, задатчик активной мощнос
ти, блок управления, содержащий сумматор, два регулятора возбуждения, выход которых подсоединен к управляемому преобразователю частоты каждой из машин, причем каждый регулятор . возбуждения содержит два преобразователя координат, сумматор и усилитель, при этом входы одного преобразователя координат являются двумя входа- ми регулятора возбуждения, которые ,по дсоединены к датчику-углового положения и скорости вращения вала, к датчику частоты соответствующей энергосистемы, выход второго преобразовано соединенные сумматор и усилитель подключен к выходу регулятора возбуждения, а входы второго преобразователя координат являются входами ре5 гулятора возбуждения, причем входы одного из регуляторов возбуждения подсоединены к двум суммирующим и двум интегрирующим элементам, при этом вход одного из суммирующих эле0 ,ментов присоединен к датчику напряжения, а второй выход подсоединен к входу одного из интегрирующих элементов, вход второго суммирующего элемента присоединен к датчику мощg ности, а второй выход подсоединен к входу второго интегрирующего элемента, входы второго регулятора возбуждения подсоединены к третьему и четвертому суммирующим и интегрирую0 Щим элементам, при этом вход третьего суммирующего элемента присоединен к датчику напряжения, а второй выход - к входу третьего интегрирующего элемента, входы четвертого сумми5 рующего элемента подсоединены к датчикам частоты и датчику углового положения и скорости вращения вала, а второй выход - к входу четвертого интегрирующего элемента, отличающееся тем, что, с целью повышения динамической устойчивости свя- зьюаемых энергосистем и надежности энергоснабжения потребителей в аварийных режимах, оно дополнительно
0
снабжено элементами сброса и наброса мощности, датчиками реактивной мощ- ности, подключенными к шинам соот- ветствующих энергосистем, датчиком активной мощности второй энергосис17
темы, вторым блоком управления, при этом регуляторы возбуждения снабжены дополнительным выходом, к кото- рому подключен выход первого преобразователя координат, дополйитель- ным входом, к которому подключен один из входов второго преобразователя координат, каждый из блоков управления дополнительно снабжен четырьмя элементами сравнения, шестью релейными элементами, четырьмя логическими элементами И, двумя элементами памяти, логическим элементом ИЛИ, дифференцирующим элементом, инвертором, датчиком предельной частоты, размыкающими и замыкающими контактами релейных элементов, причем вход одного из элементов сравнения присоединен к одному из входов блока управления, а выход соединен с одним из входов одного из релейных элементов, выход которого соединен с одним из входов двух логических элементов И, второй вход одного из них и второй вход второго через инвертор присоединен к второму входу блока управления, выход первого логического элемента И соединен с входом второго релейного элемента, выход второго логического элемента И соединен с входом третьего релейного элемента, третий вход блока управления присоединен к входу второго элемента сравнения, вьпход которого соединен с одним из входов четвертого релейного элемента, выход которого соединен с одним из входов третьего и четвертого логических элементов И, второй вход третьего логического элемента И присоединен к второму входу блока управления второй четвертого логического элемента И - к второму выходу инвертора, выход третьего логического элемента И соединен с входом пятого релейного элемента, выход четвертого логического элемента И соединен с входом шестого релейного элемента,, вход одного из элементов памяти при1473002
,его элемента сравнения присоединен к второму входу четвертого релей ного элемента и одному из входов ло гического элемента ИЛИ, второй вход которого через последовательно соединенные четвертый эле1-5ент сравнени и дифференцирующий элемент присоеди нен к пятому входу блока управления Q выход логического элемента ИЛИ присоединен к второму входу первого релейного элемента, один из выходов датчика предельной частоты через параллельно соединенные замыкающие кон 15 такты второго и шестого релейных элементов, а другой выход через параллельно соединенные замыкающие кон такты третьего и пятого релейных эле ментов подключены к выходу блока уп20 равления, который через цепочку последовательно соединенных размыкающи контактов второго, третьего, пятого шестого релейных элементов присоединен к шестому входу блока управления 25 при этом выход одного из блоков управления присоединен к дополнительно му входу, а шестой вход присоединен к второму выходу первого регулятора возбуждения, выход второго блока уп- 30 равления присоединен к дополнительному входу, а шестой вход - к второму выходу второго регулятора возбуждения, элеяенты сброса и наброса мощности, датчик активной мощности шин 25 первой энергосистемы присоединены соответственно к первому, третьему и 4eTBeptoMy входам второго блока управления, к второму и пятому входам которого присоединены соответствен- 40 но датчики реактивной и активной мощностей шин второй энергосистемы, элементы сброса и наброса мощности, датчик активной мощности шин второй энергосистемы присоединены соответ- 45 ственно к первому, третьему и четвертому входам первого блока управления, к второму и пятому входам которого присоединены соответственно датчики реактивной и
активной мощностей шин соединен к четвертому входу блока уп- 50 первой энергосистемы, первый блок управления, а вход другого элемента па- равления дополнительно снабжен седьмым релейным элементом с замыкающим и размыкающим контактами, вторьм суммирующим элементом, причем входы
мяти - к пятому входу блока управления, входы сумматора присоединены к выходам элементов памяти и четвертому блока управления, выход сум- 55 седьмого релейного элемента присое- матора Присоединен к одному из входов динены к выходам первого и второго
элементов сравнения, входы второго суммирующего элемента блока управлетретьего элемента сравнения, второй вход которого присоединен к пятому , входу блока управления, выход третьния соединены с первым и седьмым
1473002
18
,его элемента сравнения присоединен к второму входу четвертого релейного элемента и одному из входов логического элемента ИЛИ, второй вход которого через последовательно соединенные четвертый эле1-5ент сравнения и дифференцирующий элемент присоединен к пятому входу блока управления, Q выход логического элемента ИЛИ присоединен к второму входу первого релейного элемента, один из выходов датчика предельной частоты через параллельно соединенные замыкающие кон- 15 такты второго и шестого релейных элементов, а другой выход через параллельно соединенные замыкающие контакты третьего и пятого релейных элементов подключены к выходу блока уп 20 равления, который через цепочку последовательно соединенных размыкающих контактов второго, третьего, пятого и шестого релейных элементов присоединен к шестому входу блока управления, 25 при этом выход одного из блоков управления присоединен к дополнительно- му входу, а шестой вход присоединен к второму выходу первого регулятора возбуждения, выход второго блока уп- 0 равления присоединен к дополнительному входу, а шестой вход - к второму выходу второго регулятора возбуждения, элеяенты сброса и наброса мощности, датчик активной мощности шин 5 первой энергосистемы присоединены соответственно к первому, третьему и 4eTBeptoMy входам второго блока управления, к второму и пятому входам которого присоединены соответствен- 0 но датчики реактивной и активной мощностей шин второй энергосистемы, элементы сброса и наброса мощности, датчик активной мощности шин второй энергосистемы присоединены соответ- 5 ственно к первому, третьему и четвертому входам первого блока управления, к второму и пятому входам которого присоединены соответственно датчики реактивной и
активной мощностей шин 0 первой энергосистемы, первый блок управления дополнительно снабжен седьмым релейным элементом с замыкающим и размыкающим контактами, вторьм суммирующим элементом, причем входы
ния соединены с первым и седьмым
т
1Z
Ф)
(20 (6)
ffJCUg
ff-J(Ug
Фиг.5
Фи,,6
U2.7
| Авторское св.идетельство СССР № 762087, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
