1 1
Изобретение относится к системам втоматического регулирования и моет быть использовано для автоматизации различных технических объектов,
Цель изобретения - повышение точости следящего привода при изменеии напряжения блока питания.
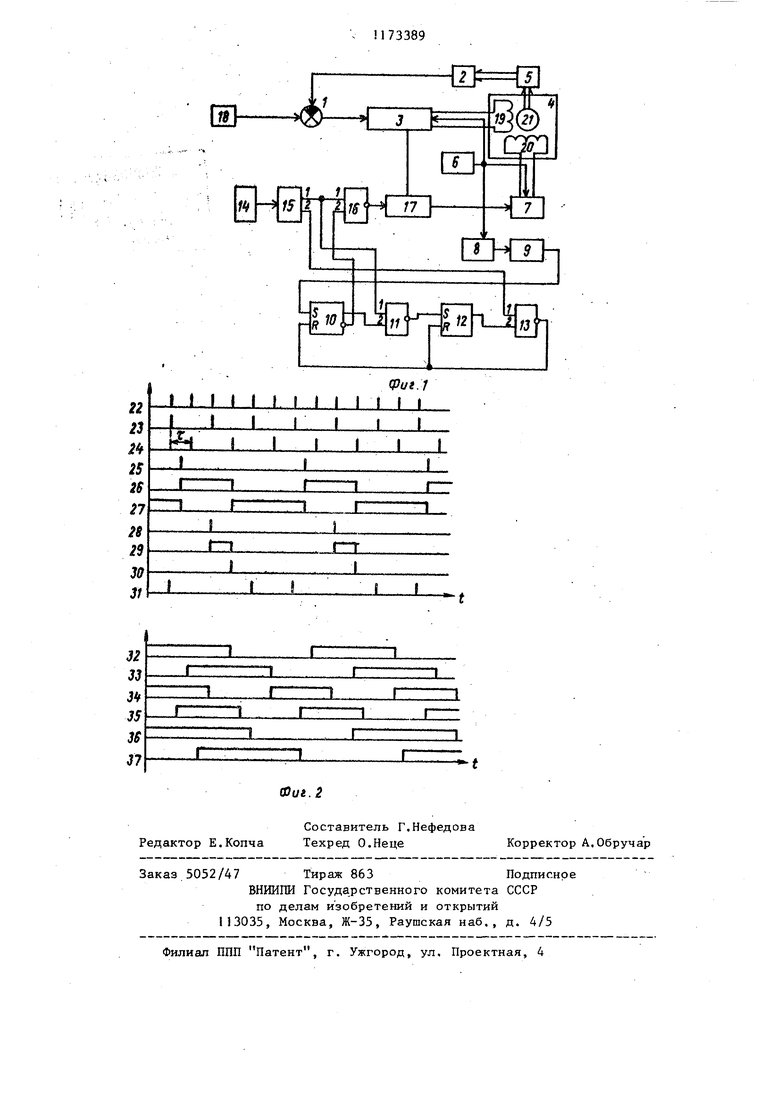
На фиг. 1 изображена блок-схема следящего привода; на фиг. 2 - временная диаграмма сигналов, поясняяцих работу устройства.
Следящий привод содержит чувствительный элемент 1, датчик 2 обатной связи, усилительно-преобразовательный блок 3, электродвигатель 4, редуктор 5, блок 6 питания, усилитель 7 мощности, генератор 8 импульсов, блок 9 развязки, первьй триггер 10, первый элемент Й-НЕ 11, второй триггер 12, второй элемент -НЕ 13, генератор 14 тактовых импульсов, распределитель 15 импульсов , третий элемент И-НЕ 16, делитель 17 частоты, задатчик 18 входного сигнала, обмотка 19 управления, обмотка 20 возбуждения, ротор 21 двигателя.
На фиг. 2 обозначены импульсы 22 на выходе генератора тактовых импульсов, импульсы 23 и 24 на первом и втором выходах распределителя импульсов, импульсы 25 на выходе генератора импульсов, сигнал 26 с прямого вьгхода первого триггера, сигнал 27 с инверсного выхода первого триггера, импульсы 28. на выходе первого элемента И-НЕ, сигнал 29 с выхода второго триггера, импульсы 30 установки триггеров в исходное состояние, импульсы 31 на входе делителя частоты, сигнал 32 управления с-делителя частоты, сигнал 33 возбуждения с делителя частоты, сигналь) 34-37 управления и возбуждения,при увеличении и уменьшении частоты гене ратора импульсов.
Первый вход чувствительного элемента 1 является входом следящего привода, на который поступает входной сигнал от задатчика 18, второй вход соединен с выходом датчика 2 обратной связи. Выход чувствительного элемента 1 соединен с, первым входом усилительно-преобразовательно го блока 3, второй вход которого соединен с первым выходом делителя 17 частоты, а выход соединен с обмот кой управления электродвигателя 4.
733892
Ротор 21 электродвигателя 4 через редуктор 5 механически соединен с датчиком 2 обратной связи. Выход генератора 14 тактовых импульсов
5 соединен с входом распределителя 15 импульсов, первый выход которого соединен с первыми входами третьего элемента И-НЕ 16 и первого элемента . И-НЕ 11, а второй выход соединен
0 с первым входом второго элемента И-НЕ 13. Выход генератора 8 импульсов через блок 9 развязки соединен с S-входом первого RS-триггера, R-вход которого соединен с
s R-входом второго RS-триггера 12 и с выходом второго элемента И-НЕ 13. Прямой выход первого RS-триггера 10 соединен с вторым входом первого элемента И-НЕ 11, а инверсный 0 с вторым входом третьего элемента И-НЕ 16. Выход первого элемента ИНЕ 11 соединен с S-входом второго RS-триггера 12, прямой выход которого соединеи с вторым входом второго элемента И-НЕ 13. Выход третьего -элемента И-НЕ 16 соединен с входом делителя 17 частоты, второй выход которого соединен с входом усилителя 7 мощности. Выход усилителя 7 мощности соединен с обмоткой возбуждения электродвигателя 4. Кроме того, блок 6 питания соединен с усилительно-преобразовательным блоком 3, усилителем 7 мощности и с генератором 8 импульсов.
Чувствительный элемент 1 представляет собой сравнивающее устройство, где иэ входного сигнала вычитается сигнал обратной 1вязи и получается ошибка следящей системы.
Генератор 8 импульсов представляет собой релаксационньй генератор, построенный на однопереходном транзисторе или его транзисторном аналоге, частота генерации импульсов которого зависит от напряжения литания.
Блок 9 развязки представляет собой диодную оптопару типа ЗОД101Б.
Распределитель 15 импульсов построен на микросхемах серии 133 133ИР1, 133ЛАЗ, 133ЛР4 согласно рекомендации РТМ этой серии генератор многофазный тактовый.
Делитель частоты представляет собой последовательно соединенные триггеры, работающие в счетном режиме . Следящий привод работает следую щим образом. Импульс высокой частоты генератора 14 тактовых импульсов поступает на вход распределителя 15 импульсов. С первого и второго выходов распределителя 15 импульсов снимаются импульсы f.,, и f..,. .II И-i Г I (23 и 24), сдвинутые относительно друг друга на время Т(фиг. 2). Им пульсы f через третий элемент И-НЕ 16 поступают на делитель 17 частоты, на выходе которого формир ются два сигнала и и U. прямоугол ной формы низкой, частоты f , сдвинутые относительно друг друга на jr/2. Полученные сигналы Ц и Uz. по ступают соответственно на второй вход усилительно-преобразовательного блока 3 и на усилитель 7 мощности, обеспечивая поочередное открывание их транзисторов в каждый полупериод напряжения частоты f . При появлении сигнала ошибки 0 на выходе чувствительного элемента 1 этот сигнал усиливается и преобразу ется усилительно-преобразовательным блоком 3 и подается .на обмотку управления двигателя 4 в виде напряже ния частоты f , величина которого пропорциональна сигналу ошибки. На обмотку возбуждения электродвигателя 4 с выхода усилителя 7 мощности подается сигнал постоянной амплитуды и частоты f , сдвинутый на л/2 относительно сигнала управления Исполнительный электродвигатель 4 через редуктор 5 повернет датчик 2 обратной связи на такой угол, при котором сигнал ошибки будет равен нулю, т.е. сигнал задатчика (входной сигнал и сигнал датчика 2 обрат ной связи, будут равны и противоположны по знаку. При изменении условий работы сле дящей систеюи, например, при изменении величины напряжения блока 6 питания, питающего через усилители мощности исполнительный электродвигатель 4, изменяются параметры следящего привода, так как изменяется развиваемый момент электродвигателя 4. Для устранения этого недостатка при изменении величины напряжения 89. 4 питания изменяется в нужную сторону частота импульсов 25 (фиг. 2) генератора 8, которые через блок 9 развязки поступают на S-вход первого RS-триггера 10 и устанавливают его в состояние (26 и 27),запрещающее прохождению тактовых импульсов с первого выхода распределителя 15 импульсов через третий элемент И-НЕ 16 на вход делителя 17 частоты и разрешающее прохождение этим импульсов на вход первого элемента ИНЕ II (состояние 28). Эти импульсы, в свою очередь, устанавливают второй триггер 12 в состояние (29), разрешающее прохождение импульсов с второго выхода распределителя 15 импульсов на первый вход второго элемента И-НЕ 13. С выхода элемента И-НЕ 13 импульсы 30 устанавливают в исходное состояние RS-триггеры 10 и 12, при котором импульсы с первого выхода распределителя. 15 импульсов через третий элемент ИНЕ 16 поступают на вход делителя 17 частоты. В результате (фиг. 2, диаграмма 31 ) на вход делителя 17 частоты поступают импульсы,частота которых равна разности частот распределителя 15 импульсов и генератора 8 импульсов. На выходе делителя 17 частоты формируются сигналы 32 и 33. При увеличении напряжения блока 6 питания уменьшается частота генератора 8 импульсов, что влечет за собой увеличение частоты сигналов возбуждения и управления и соответствующему снижению момента, развиваемого электродвигателем 4. И наоборот, при уменьшении напряжения источника 6 питания уменьшается частота сигналов управления и возбуждения, .что увеличивает ток через обмотки и приводит к увеличению развиваемого электродвигателем 4 момента. В предлагаемом следящем приводе при изменении напряжения источника питания на ±10% статическая ошибка уменьшается на 50%, динамическая - на 10%, а величина перерегулирования при ступенчатом входном воздействии на 20 згменьшается в 3 раза по сравнению с известным следящим приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1986 |
|
SU1399697A1 |
| Устройство для цифрового управления асинхронным двигателем | 1980 |
|
SU875336A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Следящая система | 1978 |
|
SU752224A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1981 |
|
SU997221A2 |
| Устройство для измерения степени гидратации биотканей | 1988 |
|
SU1836915A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1980 |
|
SU868962A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1981 |
|
SU1056422A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1990 |
|
SU1777225A1 |
| Электропривод переменного тока | 1991 |
|
SU1815788A1 |
СЛЕДЯЩИЙ ПРИВОД, содержащий последовательно соединенные чувствительный элемент, усилительно-преобразовательный блок, электродвигатель, редуктор, датчик обратной связи, соединенный выходом с одним из входов чувствительного элемента, другой вход которого соединен с задатчиком входного сигнала, а также блок нитания, генератор тактовых импульсов, делитель частоты и усилитель мощности, причем первый выход делителя частоты соединен с вторым входом усилительно-преобразовательного блока, а второй выход - с входом усилителя мощности, соединенного выходом с oб oткoй возбуждения электродвигателя, выход блока питания соединен с усилительно-преобразовательным блоком и усилителем мощности, отлич ающ и и с я тем, что, с целью повышения точности привода при изменении напряжения блока питания, в него введены генератор импульсов, блок развязки, первый RS-триггер, второй RS-триггер, первьй, второй и третий элементы И-НЕ и распределитель импульсов, причем выход генератора тактовых импульсов соединен с входом распределителя импульсов, соединенного первым выходом с первыми входами первого элемента И-НЕ и третьего элемента И-НЕ, а вторым выходом - с первым входом второго элемента И-НЕ, выход генератора импульсов через блок развязi ки соединен с S-входом первого RSтриггера, подключенного R-входом к R-входу второго RS-триггера и к выходу второго элемента И-НЕ, прямой выход первого RS-триггера соединен с вторым входом первого элемента ИНЕ, а инверсный - с вторым входом третьего элемента И-НЕ, выход первоvl го элемента И-НЕ соединен с S-входом второго RS-триггера, соединенОО ного прямым выходом с вторым входом оо 00 со второго -элемента И-НЕ, выход третьего элемента И-НЕ соединен с входом делителя частоты, а выход блока питания соединен с входом генератора импульсов.
| СЛЕДЯЩИЙ ПРИВОД С АМПЛИТУДНО-ЧАСТОТНЫМ УПРАВЛЕНИЕМ | 0 |
|
SU239410A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1972 |
|
SU470784A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
