Предложенное устройство предназначено для унравления скоростью асинхронного двухфазного двигателя при требовании новышснного быстродействия.
РГзвестные устройства .для регулирования скорости двухфазного асинхронного двигателя, содержащие раздельные усилители обмоток унравления и возбуждения, обладают недостаточным быстродействием.
Предложенное уетройство отлнчается от извеетных тем, что в нем установлен связанный с вьгходо.м усилителя сигнала рассогласования многофазный генератор синусоидальных колебаний регу.тируемой частоты, раз«офазные выходы которого через промежуточные усилители подключены соответственно к модулятору усилителя об.моток управления и к усилителю обмотки возбуждения двигателя.
Такое ;ностроение устройства обеспечивает повышение быстродействия и улучшения уелоВИЙ уетойчивости следящего привода.
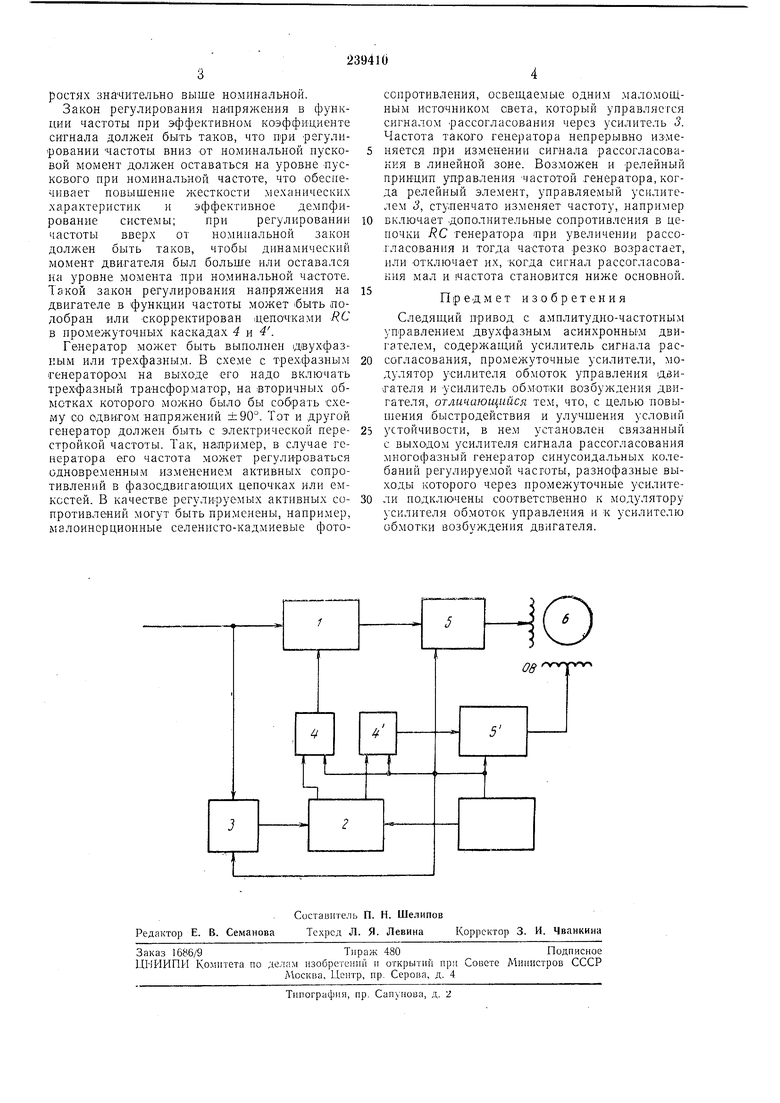
На чертеже представлена блок-схема устройства.
Схема содержит модулятор / уеилителя обмоток управления двигателя, двухфазный (трехфазный) генератор 2 синусоидальных колебаний с электрической плавной (или релейной) перестройкой частоты генератора, уси.читель 3 сигнала рассогласования, промежуточные усилительные каскады 4 и 4 неременного
тока, усилители 5 и а обмоток управления и возбуждения двигателя, исиолнительный двухфазный асинхронный двигатель 6 с обмотками ОУ и ОВ унравления и возбуждения.
Сигнал рассогласования одновремопю управляет -через блоки модулятор ус)лителя и ус 1лнтель 5 величиной { фазой на;пряжен11я на обмотку ОУ, а также и частотой генера гора 2. Схема выполнена так, что когда увеличивается сигнал рассогласования, увеличивается частота геиератора, а, следовательно, и частота напряжения на выходе усилителей 5 и 5 (и )iaпрял-сение на обмотке ОУ и наоборот). Панряжения на обмотках ОУ и ОВ остаются сдвинутыми на 90 во всем диапазоне частот.
Когда сигнал рассогласования велик, то двигатель работает на частоте значительно выше номинальной (а значит и при синхронных скоростях значительно выше таковой при номинальной частоте) и ускоренно отрабатывает сигнал рассогласования; когда же сигнал рассогласования становится меньше, генератор переводит двигатель на частоты ниже основной и на самых нижних частотах генератора двнгатель плавно подходит к точке равновесия. Так как прп отработке угла рассогласования участок работы на частотах ниже но.м1 наль}1ой составляет несколько процентов от всей шкалы ;прибора, то получается, что значительную часть угла отработки двигатель идет нри ско
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая самонастраивающаяся следящая система | 1987 |
|
SU1425601A1 |
| Способ управления двухфазным асинхронным двигателем в режиме прерывистого движения | 1985 |
|
SU1317636A1 |
| Синхронно-следящая система | 1956 |
|
SU119566A1 |
| СЛЕДЯЩАЯ СИСТЕМАВСЕСОЮЗНАЯ | 1972 |
|
SU331365A1 |
| УСИЛИТЕЛЬ ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1973 |
|
SU368712A1 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПЛАВНЫМ ТОРМОЖЕНИЕМ ПОДЪЕМНО-ТРАНСПОРТНОГО МЕХАНИЗМА | 1966 |
|
SU182786A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Устройство для управления двухфазным асинхронным двигателем | 1977 |
|
SU669462A1 |
| Следящая система | 1981 |
|
SU962844A1 |
