Изобретение относится к системе автоматического регулирования и мо- Ясет быть использовано в различных устройствах автоматики.
Целью изобретения является повышение быстродействия следящего привода.
На фиг. 1 приведена блок-схема предлагаемого следящего привода; на фиго 2 схема устройства вычита НИН импульсов; на фиг. 3 временные диаграммы сигналов, поясняющие работ устройства вычитания импульсов; на фиг. 4, 5 - экспериментальные зави- симости постоянной времени асинхрон- ного двухфазного двигателя (АДД) Тд и относительного коэффи1щента передак
чи от величины управляющего Ав.иол .
5
сигнала 6; на фиг. 6 - схема функционального преобразователя.
Следящий привод содержит вычислительное устройство 1, представляющее 25 собой дискретный блок вычитания, датчик 2 обратной связи, усилительно- преобразовательный блок 3, электродвигатель 4, редуктор 5, блок 6 питания, усилитель 7 мощности, генератор 8 им-JQ пульсов, блок 9 развязки, генератор 10 тактовьпс импульсов, устройство 11 вычитания импульсовS управляемый дели- . тель 12 частоты, функциональный преобразователь 13, задатчик 14 входного сигнала, обмотку 15 управления, обмотку 16 возбуждения, ротор 17 двигателя.
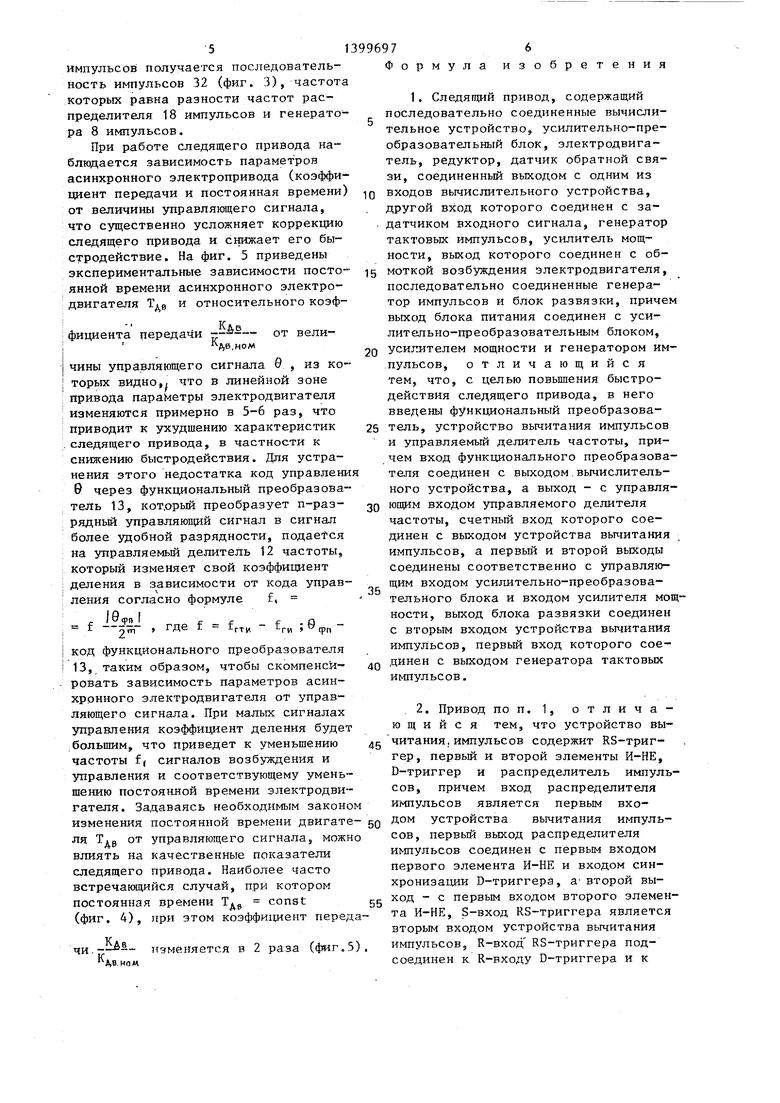
Устройство 11 вычитания импульсов содержит распределитель 18 импульсов RS-триггер 19, и-триггер 20, первьй Q и второй элементы И-НЕ 21 и 22,
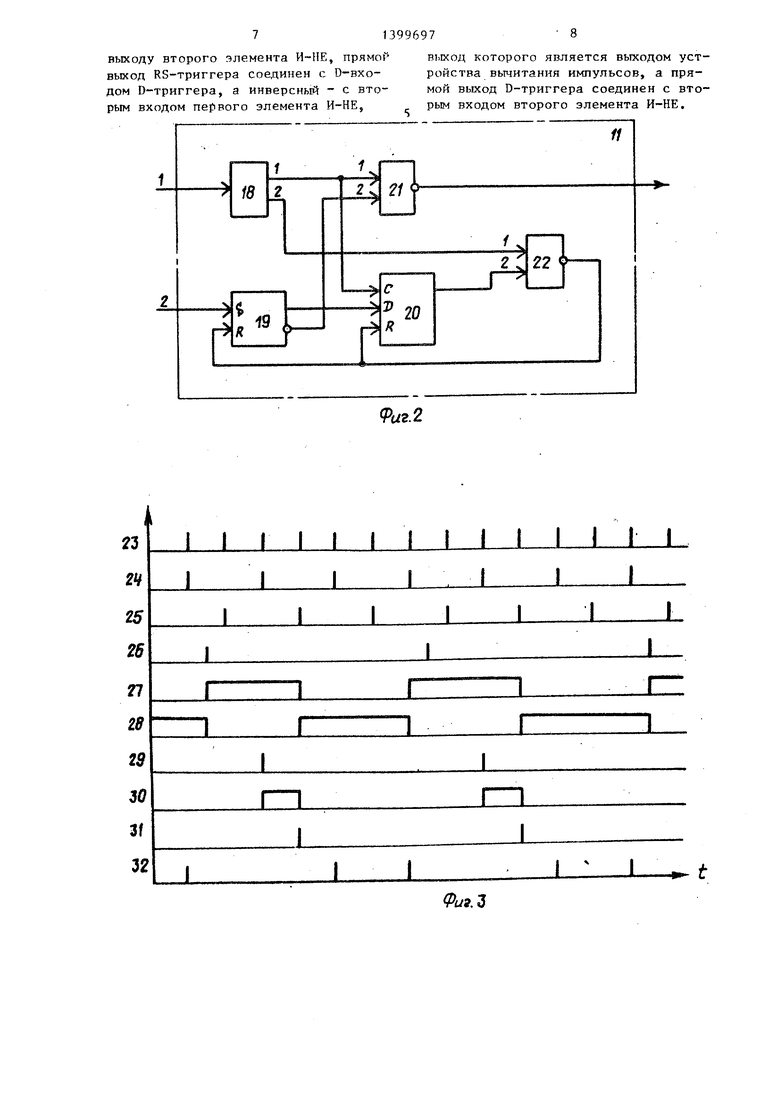
На фиг о 3 обозначены импульсы 23 на выходе генератора 10 тактовых импульсов, импульсы 24 и 25 на первом и втором выходах распределителя 18 дг импульсов, импульсы 26 на выходе генератора 8 импульсов, сигнал 27 с прямого выхода RS-триггера 19, сигнал 28 с инверсного выхода RS-триггера 19, импульсы 29, вычитаемые из выходной последовательности импульсов, сиг нал 30 с выхода D-триггера 20, импульсы 31 установки триггеров в исходное состояние,, импульсы 32 на выходе устройства 11 вычитания импульсов о
На фиг, 4, 5 приняты следующие обо 55 значения; 33 - экспериментальные зависи-, мости постоянной времени АДД от величина управляющего сигнала 9| 34 желаемая зависимость изменения постоянной времени АДЦ от величины управляющего сигнала 9.,; 35 - экспериментальные зависимости относительно коэффициента передачи от величины
Ae.HOM
управляющего сигнала 8 ; 36 - результирующая зависимость изменения относительного коэффициента передачи
Q j
0
5
5 Q.
Q
г К
КАВ от величины управляняцего
А)в. ROW
сигнала 9 .
На фиг. 6 приведен пример построения функционального преобразователя 13, преобразующего трехразрядный код сигнала управления 6 в двухразрядный код управления управляемого делителя частоты 12.
Функциональный преобразователь 13 (ФП) содержит трехразрядный дешифратор 37, элемент 3 ИЛИ 38, первьй, второй, третий, четвертый элементы 2 ИЛИ 39-42.
Первый, второй и третий выходы дешифратора 38 соединены с первым, вторым и третьим входами элемента 3 ИЛИ 38 соответственно, выход которого соединен с первым входом третьего элемента 2 ИЛИ 41. Четвертый и пятый выходы дещнфратора соединены соответственно с первым и вторым входами первого элемента 2 ИЛИ 39, выход которого соединен с первым входом четвертого элемента 2 ИЛИ 42, Шестой и седьмой выходы дешифратора соединены соответственно с первым и вторым входами второго элемента 2 ШШ 40, выход которого соединен с вторыми входами третьего 41 и четвертого 42 элементов 2 ИЛИ соответственно. На выходе третьего 41 и четвертого 42 элементов 2 ИЛИ формируется двухразрядный код. Работа функционального преобразователя 13 определяется таблицей истинности.
Продолжение таблицы
Устройство работает следующим об- разом.
Импульсы высокой частоты f (фиг. 3,п. 23) с генератора 10 тактовых импульсов поступают на первый вход устройства 11 вычитания импуль- сов, на второй вход которого с генератора 8 импульсов через блок 9 развязки поступают импульсы частоты которые вычитаются из импульсов частоты ffTM- Импульсы результирующей ча- стоты с выхода, устройства 11 вьгчита- НИН импульсов поступают на вход управляемого делителя частоты 12, на выходе которого формируются два сигнала и, и и прямоугольной формы низ- кой частоты f|, сдвинутые относительно друг друга на тг/2. Полученные сигналы и, и U2 поступают соответственно на второй вход усилительно-преобразовательного блока 3 и на усилитель 7 мощности, обеспечивая поочередно открывание их транзисторов в каждый полупериод напряжения частоты f . При появлении сигнала ошибки В на выходе вычислительног о устройства 1 этот сигнал усиливается и преобразуется усилительно-преобразовательным блоком 3 и подается на обмотку 15 управления электродвигателя 4 в виде напряжения частоты f, , величина ко- торого пропорциональна сигналу ошибки. На обмотку 16 возбуждения электродвигателя А с выхода усилителя 7 .мощности подается сигнал постоянной амплитуды и частоты fy, .сдвину- той на V/2 относительно сигнала управления . Исполнительный электродвигатель 4 через редуктор 5 повернет датчик 2 обратной связи на такой угол при котором сигнал ошибки 9 будет равен нулю, т.е. сигнал задатчика 14 (входной сигнал) и сигнал датчика 2 обратной связи будут равны и противоположны по знаку.
0
5
5
0 5 0 д с
5
При изменении условий работы следящего привода, например при изменении величины напряжения блока 6 питания, питающего через усилители мощности исполнительный электродвигатель 4, измен 1ются параметры следящего привода, так как изменяется развиваемый момент электродвигателя 4. Для устранения этого недостатка при изменении величины напряжения питания изменяется в нужную сторону частота импульсов 26 генератора 8 импульсов, которая в устройстве 11 вычитания импульсов вычитается из частоты импульсов генератора 10 тактовых импульсов. При увеличении напряжения блока 6 питания частота генератора 8 импульсов уменьшается, что влечет за собой увеличение частоты fj сигналов возб ткдения и управления.и соответ- ствующее снижение момента, развива- емого электродвигателем 4. При уменьшении напряжения источника 6 питания З меньшается частота сигналов управления и возбуждения, что увеличивает ток через обмотки и приводит к увеличению развиваемого электродвигателем 4 момента.
Устройство 11 вычитания импульсов работает следующим образом.
Импульсы 26 с выхода генератора 8 импульсов через блок 9 развязки поступают на S-вход RS-триггера 19 и устанавливают его в состояние, запрещающее прохождение тактовых импульсов 24 с первого-выхода распределителя 18 импульсов через первый элемент И-НЕ 21 на выход устройства 11 вычитания импульсов, т.е. из выходной последовательности импульсов вь читается один импульс 29. С приходом импульса с первого выхода распределителя 18 импульсов сигнал 27 с прямого выхода RS-триггера 19 записывается на выход D-триггера 20, который разрешает прохождение импульсов 25 с второго выхода распределителя 18 импульсов через второй-элемент И-НЕ 22. Импульс 31 с второго выхода распределителя 18 импульсов через второй элемент И-НЕ 22 устанавливает в исходное состояние RS-триггер 19 и D-триггер 20, при котором импульсы с первого выхода распределителя 18, импульсов через первый элемент И-НЕ 21 поступают на выход устройства 11 вычитания и fflyльcoв. В результате на выходе устройства 11 вьF итaния
импульсов получается последовательность HhmynbcoB 32 (фиг. 3), частота которых равна разности частот распределителя 18 импульсов и генератора 8 импульсов.
При работе следящего привода наблюдается зависимость параметров асинхронного электропривода (коэффициент передачи и постоянная времени) от величины управляющего сигнала, что существенно усложняет коррекцию следящего привода и снижает его быстродействие. На фиг. 5 приведены экспериментальные зависимости посто- НИНОЙ времени асинхронного электродвигателя Тдд и относительного коэфКлвфициента передачи --° от велиК в.ном
чины управляющего сигнала Q , из которых видно,, что в линейной зоне привода параметры электродвигателя изменяются примерно в 5-6 раз, что приводит к ухудшению характеристик . следящего привода, в частности к снижению быстродействия. Для устранения этого недостатка код управлени Q через функциональный преобразователь 13, кот.орый преобразует п-раз- рядньй управляющий сигнал в сигнал более удобной разрядности, подается на управляемый делитель 12 частоты, который изменяет свой коэффициент деления в зависимости от кода управления согласно формуле f,
f J
2 f - ft-ти ГИ cpn
ГИ ФП
КОД функционального преобразователя 13, таким образом, чтобы скомпенсй- ровать зависимость параметров асинхронного электродвигателя от управляющего сигнала. При малых сигналах Згаравления коэффициент деления будет большим, что приведет к уменьщению частоты f( сигналов возбуждения и управления и соответствующему уменьшению постоя1шой времени электродвигателя. Задаваясь необходимым законом изменения постоянной времени двигате- ля Тдр от управляющего сигнала, можно влиять на качественные показатели следящего привода. Наиболее часто встречающийся случай, при котором постоянная времени Тд const (фиг. 4), при этом коэффи1щент передачи, изменяется н 2 раза (фиг,5)
К
Л,в. мам
5
5 о
5
0 5 5
Формула изобретения
1,Следящий привод, содержащий последовательно соединенные вычислительное устройство, усилительно-преобразовательный блок, электродвигатель, редуктор, датчик обратной связи, соединенный выходом с одним из входов вычислительного устройства, другой вход которого соединен с за- датчиком входного сигнала, генератор тактовых импульсов, усилитель мощ ности, выход которого соединен с обмоткой возбуждения электродвигателя, последовательно соединенные генератор импульсов и блок развязки, причем выход блока питания соединен с усилительно-преобразовательным блоком, усилителем мощности и генератором импульсов, отличающийся тем, что, с целью повышения быстродействия следящего привода, в него введены функциональный преобразователь, устройство вычитания импульсов и управляемый делитель частоты, причем вход функционального преобразователя соединен с выходом.вычислительного устройства, а выход - с управляющим входом управляемого делителя частоты, счетный вход которого сое- дишгн с выходом устройства вычитания импульсов, а первый и второй выходы соединены соответственно с управляющим входом усилительно-преобразовательного блока и входом усилителя мощности, выход блока развязки соединен
с вторым входом устройства вычитания импульсов, первый вход которого соединен с выходом генератора тактовых импульсов.
2.Привод по п. 1, отличающийся тем, что устройство вы читания.импульсов содержит RS-триг- гер, первый и второй элементы И-НЕ, D-триггер и распределитель импульсов, причем вход распределителя импульсов является первым входом устройства вычитания импульсов, первый выход распределителя импульсов соединен с первым входом первого элемента И-НЕ и входом синхронизации D-триггера, а второй выход - с первым входом второго элемента И-НЕ, S-вход RS-триггера является вторым входом устройства вычитания импульсов, R-вход RS-триггера подсоединен к R-входу D-триггера и к
71399697
выходу второго элемента И-НЕ, прямой выход RS-триггера соединен с D-BXO- дом D-триггера, а инверсный - с вторым входом первого элемента И-НЕ,
вы ро мо ры
8
выход которого является выходом устройства вычитания импульсов, а прямой выход D-триггера соединен с вторым входом второго элемента И-НЕ.

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1984 |
|
SU1173389A1 |
| Устройство для регулирования тока | 1988 |
|
SU1582321A1 |
| Устройство автоматической подстройки частоты | 1989 |
|
SU1698987A1 |
| Устройство для цифрового управления асинхронным двигателем | 1980 |
|
SU875336A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Устройство автоматической подстройки частоты | 1990 |
|
SU1803976A2 |
| Устройство для разбраковки полупроводниковых диодов | 1983 |
|
SU1164636A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1981 |
|
SU1056422A1 |
| Устройство для зарядки емкостного накопителя | 1989 |
|
SU1780150A1 |

Изобретение относится к системам автоматического регулирования и может быть использовано в различных устройствах автоматики. Целью изобретения является повьшение быстродей- -ствия следящего привода. Сущность изобретения заключается в том, что частота опорного источника, связанная с частотой питания обмоток асинхронного электродвигателя (АДЦ), изменяется в зависимости от величины ощибки следящего управления, причем закон изменения частоты выбирается таким образом, чтобы постоянная времени АДЦ сохранялась неизменной в широком диапазоне изменения ошибки следящего привода. Для этого в следящий привод, содержащий вычислительное устройство 1, усилительно-преобразовательный блок 3, электродвига тель 4, редуктор 5, датчик 2 обратной связи, блок питания 6, генератор 10 тактовых импульсов, усилитель мощности 7, генератор импульсов 8, блок развязки 9, дополнительно введены функциональный преобразователь 13, устройство 11 вьгаитания импульсов и управляемый делитель.частоты 12 с соответствующими связями. 1 з,п. ф-лы, 6 ил., 1 табл. с S (Л со со со О5 со ч1
й/г.З
т
US
цз
4«
/ WOtlf
33
ifto
9u9.lt
iS
36
sда
Ял5
3
| Устройство для цифрового управления асинхронным двигателем | 1980 |
|
SU875336A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
