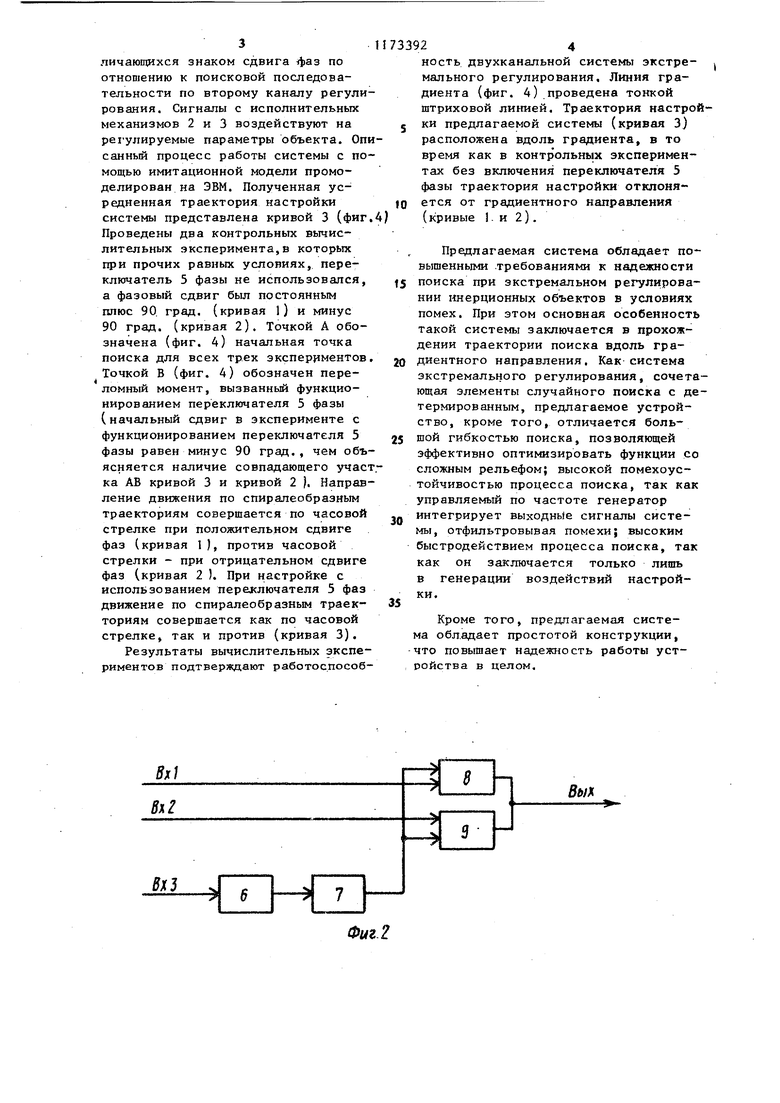
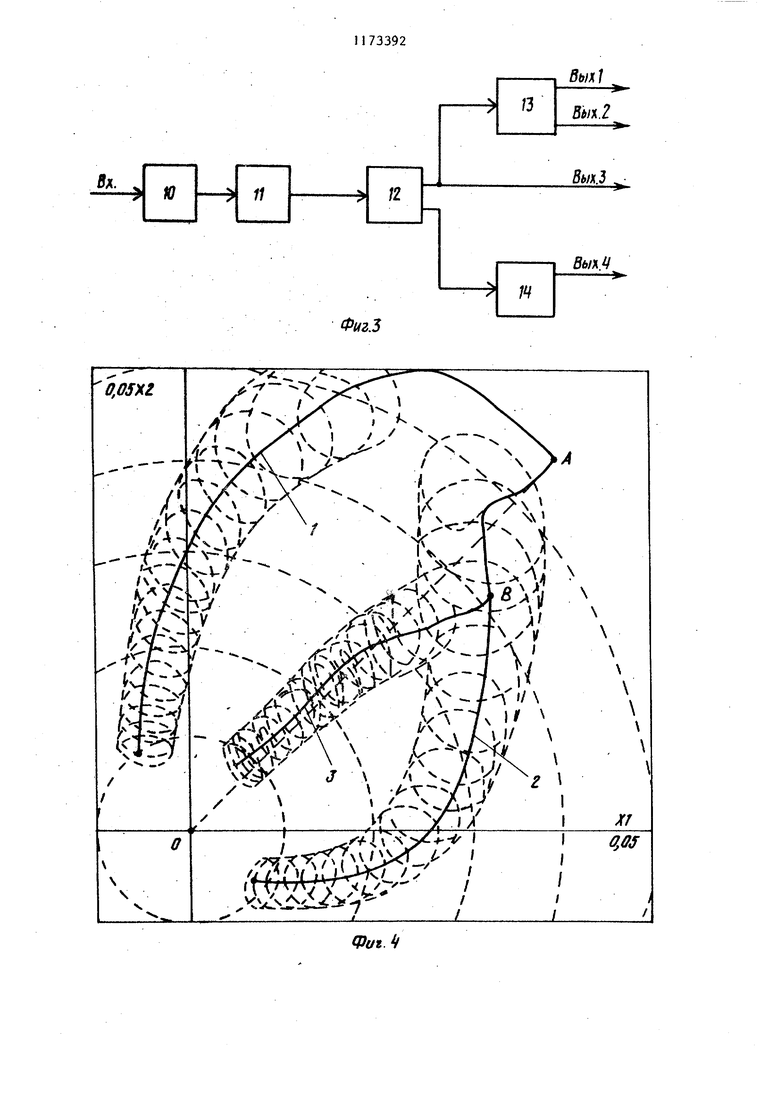
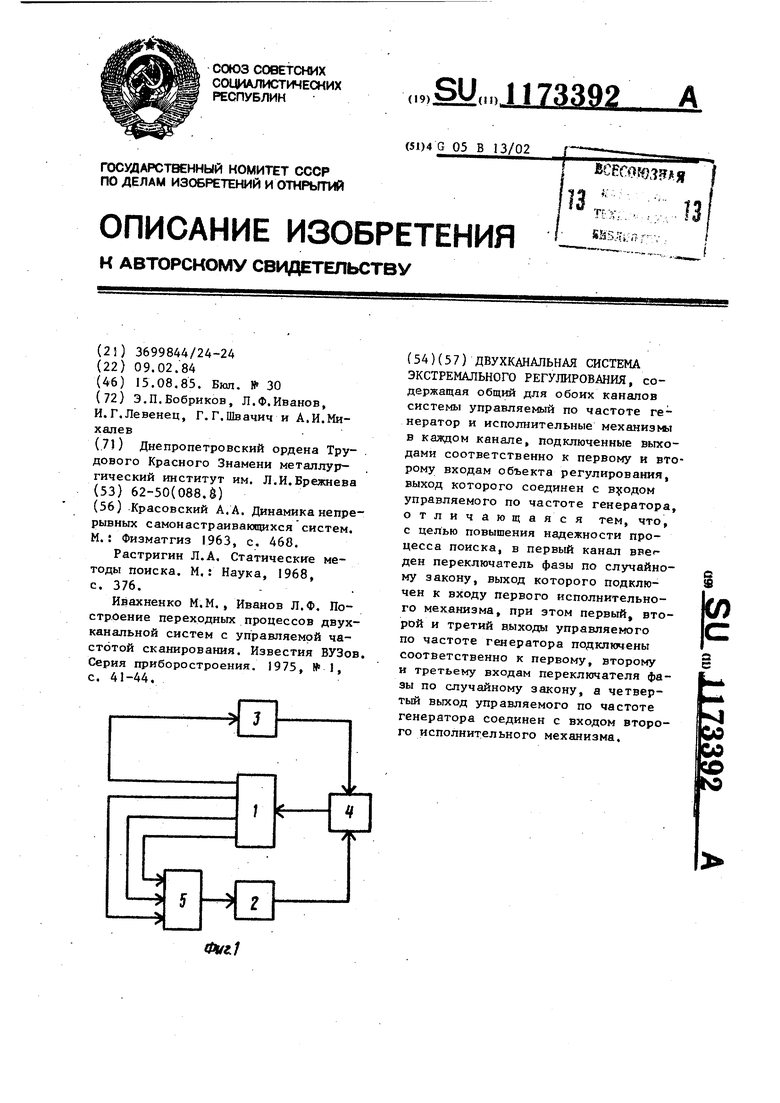
Изобретение относится к системам экстремального управления. Наиболее целесообразной сферой использования изобретения является экстремальное регулирование инерционных объектов в условиях помех. Цель изобретения - повышение надежности процесса поиска. На фиг. 1 изображена структурная схема двухканальной системы экстремального регулирования; на фиг. 2 - функциональная схема переключателя фазы по случайному закону; на фиг. 3 - функциональная схема управляемого по частоте генератора; на фиг. 4 - усредненные кривые процесса поиска экстремума на плоскости параметров двумерного объекта экстремального управления при постоянном сдвиге фаз плюс 90 град (кривая 1), при постоянном сдвиге фаз минус 90 град, (кривая 2 при случайном изменении знака сдвига фаз плюс-минус 90 град, (кривая Двухканальная система экстремаль ного регулирования содержит управля емый по частоте генератор 1, первый 2 и второй 3 исполнительные механизмы, объект 4 регулирования и пер ключатель 5 фаз по случайному закон состояп й из счетчика 6 импульсов, генератора 7 случайных сигналов, клю чей 8 и 9, Взависимости от числа импульсов, поступающих на вход и вызывающих переполнение счетчика 6 производится запуск генератора 7 случайных сигналов, который по слу чайному закону устанавливает в откр тое положение один из ключей 8 или 9. При этом на выход случайного пер ключателя фазы поступают сигналы че рез ключ 8 или через ключ 9. Функциональная схема управляемого по частоте генератора содержит управляемый по частоте мультивибратор 10, делитель 11 частоты и три триггера 12-14, На выход мультивибpaTdpa 10 подается сигнал с выхода объекта экстремального регулирования, в соответствии с которым измен ется частота переключений мультивиб ратора 10. Делитель 11 частоты служит для согласования диапазона изме нения частоты мультивибратора 10 с диапазоном рабочих частот объекта управления. Триггеры 12-14 предназн чены для формирования последователь ностей поисковых управлений, сдвинутых по фазе на плюс или минус 90 град, по отношению друг к другу. С целью проверки работоспособности предлагаемой двухканальной системы экстремального регулирования бьта составлена имитационная математическая модель системы, которая была реализована на алгоритмическом языке ФОРТРАН ЕС ЭВМ. Результаты трех вычислительных экспериментов представлены на фиг. 4. Здесь тонкой штриховой линией обозначены линии равного уровня функции, моделирующей экстремальный объект, и спиралеобразные траектории, по которым происходит процесс экстремального регулирования в плоскости регулируемых параметров. Двухканал-ьная система экстремального регулирования работает следующим образом. Изменяющееся в процессе поиска напряжение с В5 1хода объекта поступает на вход управляемого по частоте генератора 1, который формирует длительность интервала переключения в системе. Регулярные кусочно-постоянные знакопеременные поисковые управления с изменяемой длительностью, генерируемые на первом, втором и четвертом выходах управляемого по частоте генератора 1, поступают на первые и вторые входы переключателя 5 фазы в первом канале регулирования и навход исполнительного механизма второго канала соответственно. С третьего выхода управляемого по- частоте генератора 1 на третий вход переключателя 5 фазы поступают перепады напряжения, генерируемые в моменты переключения. Счетчик переключателя 5 фазы подсчитывает моменты переключения и при переполнении запускает генератор случайных сигналов, который по случайному закону устанавливает в открытое положение ключ 9. или же, наоборот, закрывает ключ 9 и открывает ключ 8. Частота запуска генератора случайных сигналов зависит от .емкости счетчика, которая может регулироваться числом включeJHHыx разрядов. Через открытьй ключ на выход переключателя 5 фазы и далее на вход исполнительного механизма 2 поступают, сменяя одна другую по случайному закону в процессе регулирования, два типа поисковых последовательностей, разлнчающихся знаком сдвига 4аз по отношению к поисковой последовательности по второму каналу регули рования. Сигналы с исполнительных механизмов 2 и 3 воздействуют на регулируемые параметры объекта. Оп санный процесс работы системы с по мощью имитационной модели промоделирован на ЭВМ. Полученная усредненная траектория настройки системы представлена кривой 3 (фиг Проведены два контрольных вычислительных эксперимента,в которых при прочих равных условиях, переключатель 5 фазы не использовался, а фазовый сдвиг был постоянным плюс 90. град, (кривая 1) и минус 90 град, (кривая 2). Точкой А обозначена (фиг. 4) начальная точка поиска для всех трех экспериментов Точкой В (фиг. 4) обозначен переломный момент, вызванньй функционированием переключателя 5 фазы (начальный сдвиг в эксперименте с функционированием переключателя 5 фазы равен минус 90 град., чем объ ясняется наличие совпадающего учас ка АВ кривой 3 и кривой 2 |. Направ ление движения по спиралеобразным траекториям совершается по часовой стрелке при положительном сдвиге фаз (кривая 1), против часовой стрелки - при отрицательном сдвиге фаз (кривая 2 ). При настройке с использованием переключателя 5 фаз движение по спиралеобразным траекториям совершается как по часовой стрелке, так и против (кривая 3). Результаты вычислительных экспериментов подтверждают работос.пособ 924 ность двухканальной системы экстре- j мального регулирования. Линия градиента (фиг. 4) проведена тонкой штриховой линией. Траектория настройки предлагаемой системы (кривая 3) расположена вдоль градиента, в то время как в контрольных экспериментах без включения переключателя 5 фазы траектория настройки отклоняется от градиентного направления (кривые 1. и 2). Предлагаемая система обладает повышенными требованиями к надежности поиска при экстремальном регулировании инерционных объектов в условиях помех. При этом основная особенность такой системы заключается в прохождении траектории поиска вдоль градиентного направления. Как система экстремального регулирования, сочетающая элементы случайного поиска с детермированным, предлагаемое устройство, кроме того, отличается большой гибкостью поиска, позволяющей эффективно оптимизировать функции со сложным рельефом; высокой помехоустойчивостью процесса поиска, так как управляемый по частоте генератор интегрирует выходные сигналы системы, отфильтровывая помехи; высоким быстродействием процесса поиска, так как он заключается только лишь в генерации воздействий настройки. Кроме того, предлагаемая систеа обл.адает простотой конструкции, то повышает надежность работы устройства в целом.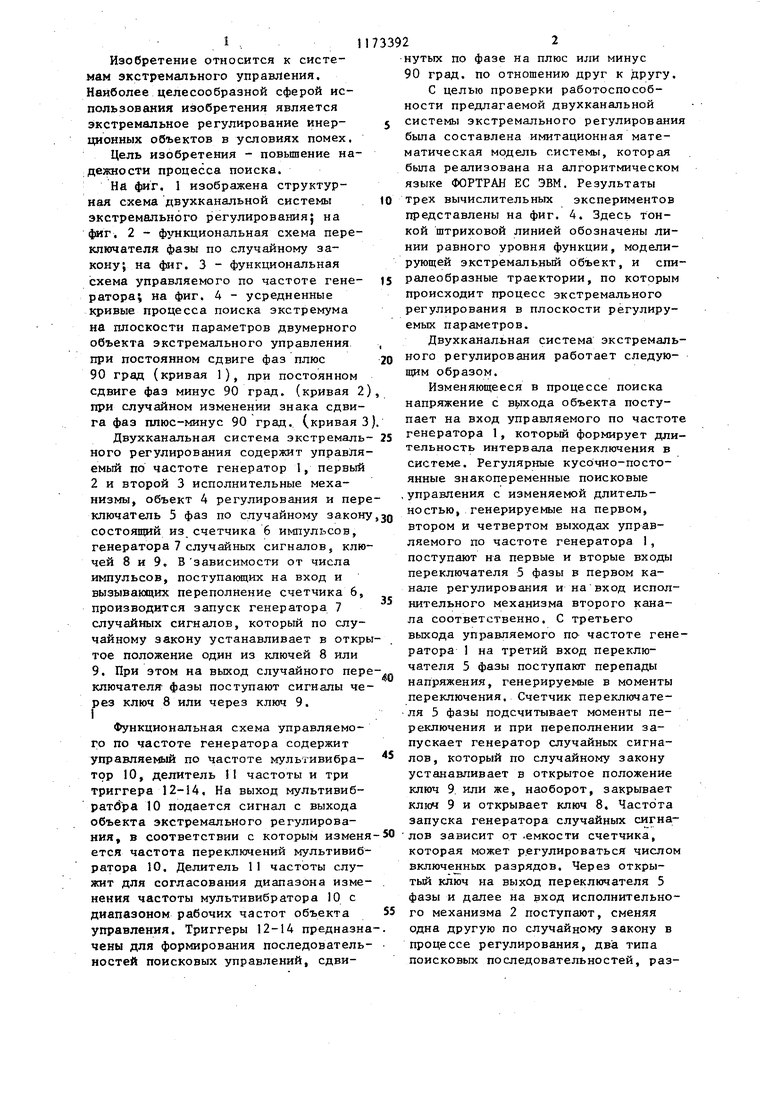
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Вибрационный сепаратор | 1988 |
|
SU1538934A1 |
| Устройство для автоматической настройки компенсации емкостного тока однофазного замыкания на землю в электрической сети переменного тока | 1978 |
|
SU748620A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| Устройство для автоматической настройки дугогасящей катушки | 1977 |
|
SU702447A1 |
Фиг-2
| Красовский А | |||
| А | |||
| Динамика непрерывных самонастраивающихся систем | |||
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
| Растригин Л.А | |||
| Статические методы поиска, М.: Наука, 1968, с | |||
| Газогенератор для дров, торфа и кизяка | 1921 |
|
SU376A1 |
| Ивахненко М.М., Иванов Л.Ф | |||
| Построение переходных процессов двухканальной систем с управляемой частотой сканирования | |||
| Известия ВУЗов | |||
| Серия приборостроения | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Механический грохот | 1922 |
|
SU41A1 |
