1
Изобретение относится к области систем автоматического управления и может найти применение при решении задач идентификации не полностью наблюдаемых стационарных и нестационарных мно гопараметрических объектов при различных уровнях полноты априорной информации.
Цель изобретения - увеличение быстродействия и точности при проведении идентификации параметров многомерных не полностью наблюдаемых объектов. При этом под неполным набждением понимается наблюдение на выходе многомерного объекта только ег координат (величины, характеризующие скорость, ускорение объекта и т.д., не наблюдаются/.
На фиг.1 дана структурная схема идентификатора многомерных объектов; на фиг.2 - электрическая схема управляемого по частоте генератора входных воздействий; на фиг.З - функциональная схема управляемого по частоте тактового генератора; на фиг.4 - функциональная схема блока формирования случайных реверсивных воздействий; на фиг.5 - временные диаграммы работы блоков форми рования случайных реверсивных воздействий .
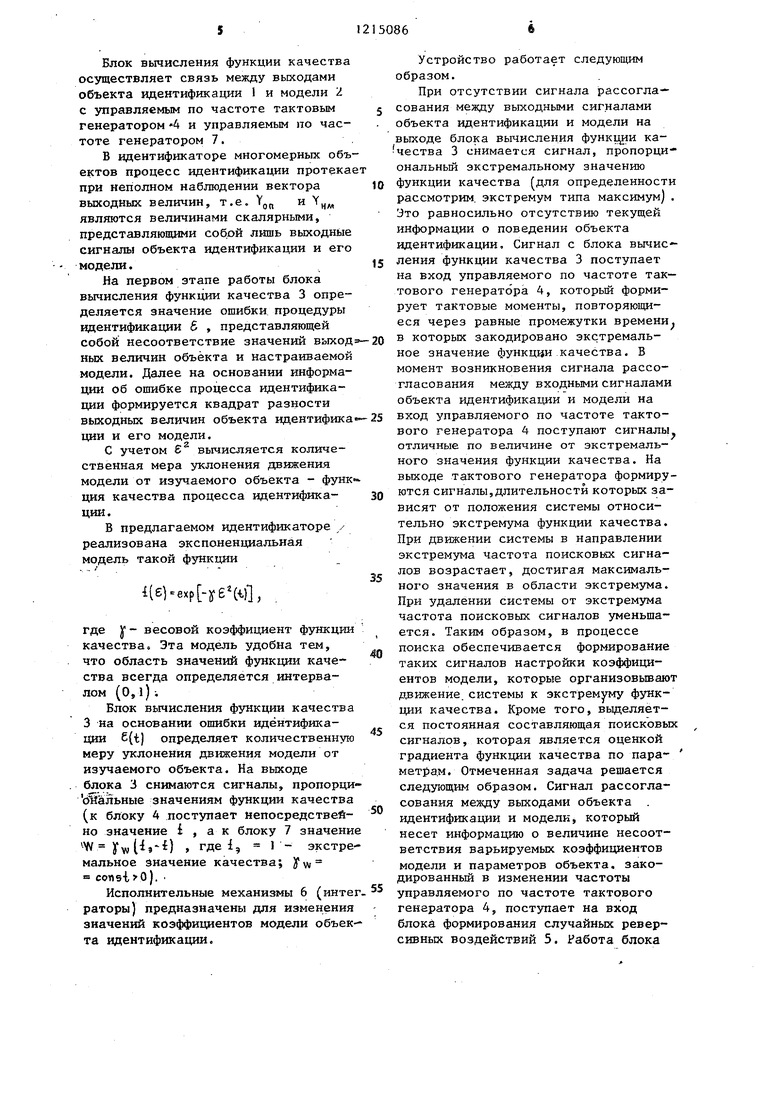
Структурная схема предлагаемого j идентификатора многомерных объектов (фиг.1) состоит из объекта идентификации 1, модели объекта идентификации 2, блока вычисления функции качества 3, управляемого по частоте тактового генератора 4, блока формирования случайных реверсивных воздействий 5, интеграторов 6 и управляемого по частоте генератора входных воздействий 7.
Управляемьш по частоте генератор входных воздействий 7 предназначен ДД1Я активации системы по входу. Необходимо отметить, что идентификация динамических параметров на основании измерений возможна только в том случае когда измерения вьшолнены в период переходного участка системы Поэтому задачу эффективной активизации переходного процесса в системы, выполняет указанный блок.
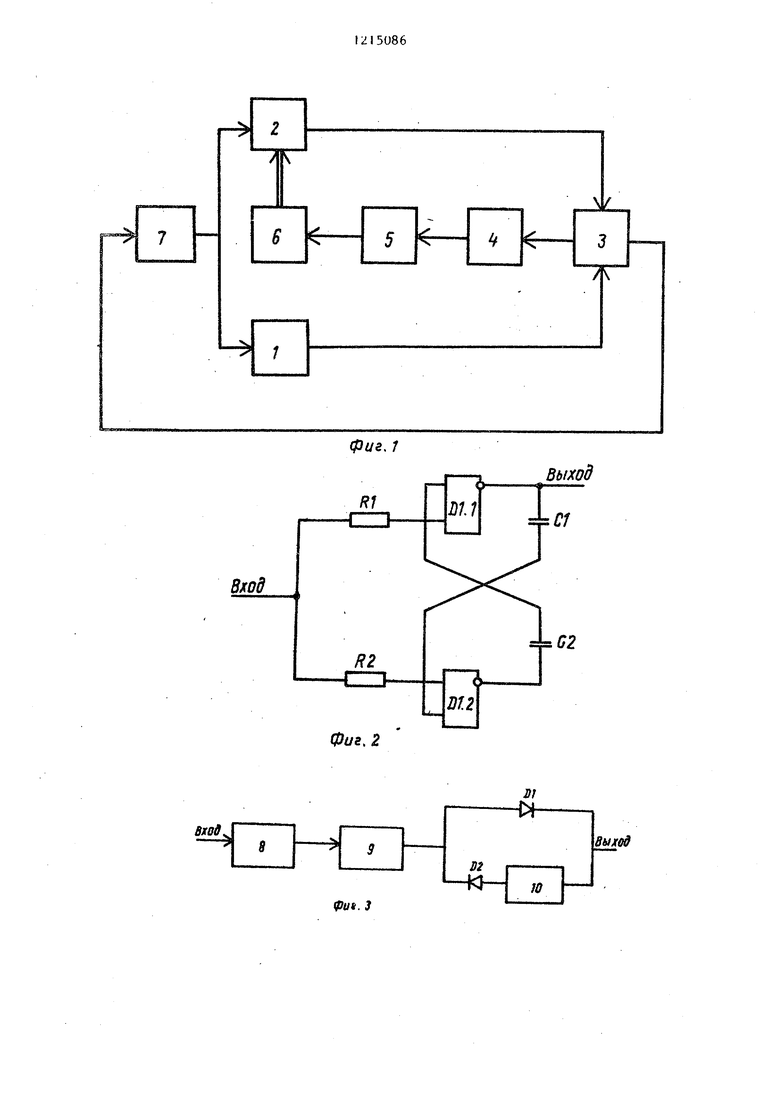
Электрическая схема управляемого по частоте генератора входных воздействий (фиг.2) состоит из двух микросхем Д1.1 и Д1.25 времязарядных элементов С1 и С2, а также резисто150862
ров RI и R2. Блок собран по схеме симметричного мультивибратора, в котором частоту выходных импульсов регулируют управляющим напряжением. 5 В таком устройстве чем больше (по абсолютной величине) управляющее напряжение, тем быстрее при зарядке конденсаторов напряжение ла выходе логического элемента уменьшается
to до порога переключения, и следовательно, тем больше частота генерируемого сигнала. Таким образом, управляемый по частоте генератор 7 формирует сигналы, частота которых зави15 сит от положения системы относительно экстремума функции качества. Изменение частоты генератора может происходить по закону, близкому к линейному. При этом особенность
20 управляемого по частоте генератора входных воздействий такова, что при движении системы в область экстремума его частота возрастает, а при движении системы в сторону от экстрему25 ма - уменьшается. С этой точки зрения управляемый по частоте генератор входных воздействий повышает надежность процесса идентификации, обеспечивая адаптацию системы по
,- входу, с одной стороны, и надежную активизацию входных воздействий - с другой. Изменение частоты данного генератора при этом соответствует информации: о положении сис1 емы относительно экстремума функции качества; о характере сигнала управления , необходимого для - эффективного распознавания параметров объекта идентификации.
Управляемьш по частоте тактовый генератор 4 предназначен для формирования интервалов переключения, в длительностях которых закодированы значения настраиваемых коэффициентов модели объекта идентификации. Кроме того, использование управляемого по частоте тактового генератора позволя- ет улучшить такие характеристики системы как точность, быстродействие, помехоустойчивость и надежность.
В предлагаемом устройстве процессы изменения длительностей управляющих воздействий и формирование моментов переключения в соответствии со значениями функции качества проис55 ходят не по условию сравнения F; и Pj. значений критерия качества идентификации, а за счет изменения частоты тактового генератора.
35
40
45
3
функциональная схема управляемого по частоте тактового генератора (фиг.З) включает в себя управляемьй по частоте генератор 8 (фиг.2), дифференцирующую цепь 9, инвертор К), а также диоды Д1 и Д2,
Блок формирования случайных реверсивных воздействий необходим для расширения области возможных направлений при поиске экстремума функции качества процесса идентификации параметров изучаемого многомерного объекта. Кроме того, его включение в идентификатор решает задачу уменьшения взаимовлияния коэффициентов модели друг от друга в процессе их настройки (развязка каналов настройки/, а также задачу селектирования локальных экстремумов функции качества процесса идентификации. Блок формирует сигналы бинарной формы с различной длительностью участков знакопостоянства по количеству настраиваемых коэффициентов модели. При этом величины приращений коэффициентов носят цель- нонаправленный характер и формируются с учетом текущей информации о состояниях модели и объекта идентификации при наличии случайного выбора знака шага поиска. Следует отметить, что блок 5 не только реализует случайный выбор изменения направлений скоростей настраиваемьгх коэффициентов модели объекта идентификации,, но и производит выбор значений этих коэффициентов, определяющих положение модели объекта идентификации в пространстве состояний с дальнейшей настройкой коэффициентов модели по отношению к идентифицируемым параметрам объекта. Блок 5 имеет вход запуска и параметрические выходы. На вход запуска подаются сир налы от управляемого по частоте тактового генератора, а параметрические выходы подключены к исполнительным механизмам.
Функциональная схема блока 5 (фиг.4) состоит из генераторов случайных сигналов 11,12, источника оперного напряжения 13, компараторов 14,15, счетчика 16, ключей 17,18, инверторов 19,20, блоков памяти 21,- 22 и дифференцирующей цепи 23.
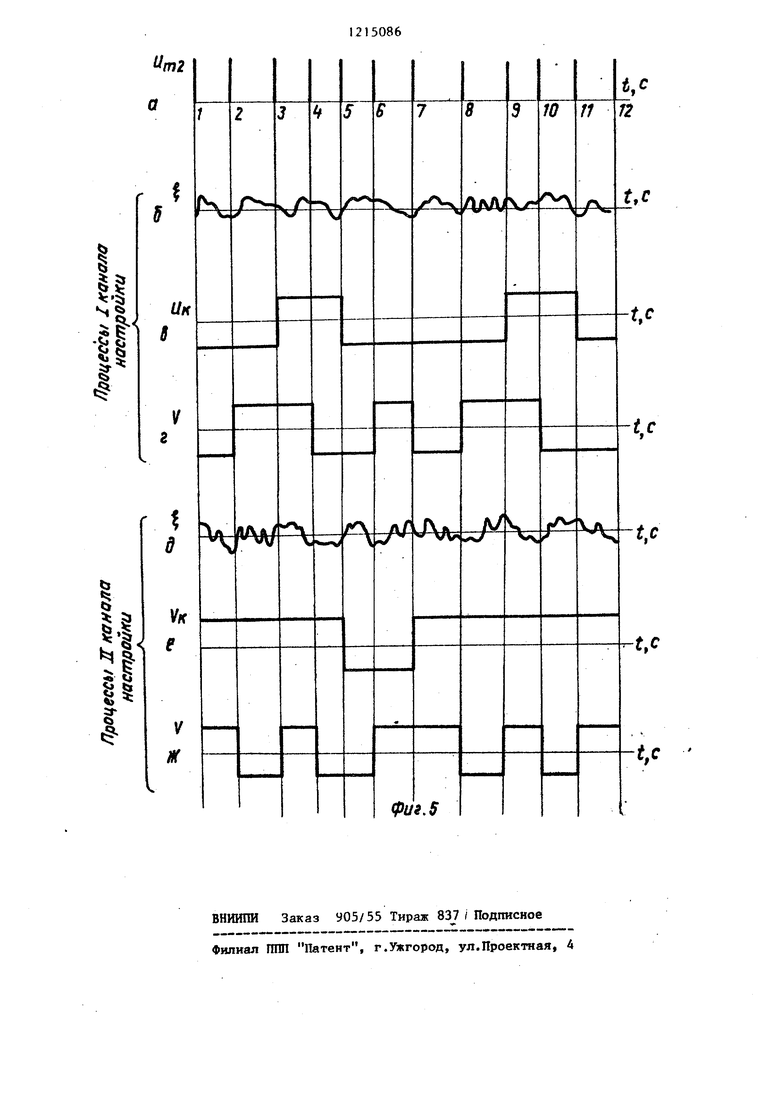
Рассмотрим работу блока 5 с учетом временных диаграмм (фиг.5). Дпя простоты рассмотрим работу одного
15086
канала настройки параметров объекта идентификации. При прохождении нечетного тактового импульса (фиг.За) через счетчик 16 дифференцирующую цепь
5 23 срабатьшает ключ 17, замыкаются контакты К 1.1 и напряжение с выхода генератора II (фиг.Зб) поступает на вход блока памяти 21, который запоминает случайное напряжение до
10 прохода следующей выборки (в момент прохождения последующего нечетного тактового импульса). Далее с выхода компаратора 14 (фиг.Зв) поисковое воздействие определенной полярности
15 (фиг.Зг) поступает через нормально замкнутые контакты К2.2 на вход соответствующего интегратора идентификатора многомерных объектов. В момент прихода четного тактового им20 пульса срабатьшает ключ 18, размыкаются контакты К2.2 и соответственно замыкаются контакты К2.1. Таким образом, поисковое воздействие инвертируется (фиг.Зг) при помощи ин25 вертора 1У, однако полярность сигнала на выходе компаратора остается неизменной (фиг.Зв) . При поступлении следующего (уже нечетного) тактового импульса срабатьшает ключ
2 н процесс поиска повторяется.
Процессы, протекающие в других каналах настройки (фиг.5 д,е,ж), подобны рассмотренному, однако поисковые воздействия ввиду наличия в каждом из каналов источников случайности будут статистически независимыми.
35
40
Математическая модель блока Ь мо- жет быть представлена следующими соотношениями:
45
Р п-1
-Уцвсли к« гд
где
If
знакопеременные кусочно- постоянные поисковые сигналы;
27-1 случайная равномерно рас- пределенная последовательность чисел; 11 - постоянный регулируемый
уровень (порог); Л - последовательность чисел 51,2,3,.. . п ;
- моменты срабатьшания управляемого по частоте тактового генератора.
Блок вычисления функции качества осуществляет связь между выходами объекта идентификации 1 и модели 2 с управляемым по частоте тактовым генератором -4 и управляемым по частоте генератором 7.
В идентификаторе многомерных объектов процесс идентификации протека при неполном наблюдении вектора выходных величин, т.е. Y и „ являются величинами скалярными, представляющими собой лишь выходные сигналы объекта идентификации и его модели.
На первом этапе работы блока вычисления функции качества 3 определяется значение ошибки процедуры идентификации 6 , представляющей собой несоответствие значений выход ных величин объекта и настраиваемой модели. Далее на основании информации об ошибке процесса идентификации формируется квадрат разности выходных величин объекта идентифика ции и его модели.
С учетом 6 вычисляется количественная мера уклонения движения модели от изз чаемого объекта - функ ция качества процесса идентифика- ции.
В предлагаемом идентификаторе / реализована экспоненциальная
модель такой функции
. -, /- . .
i(e exp -jfe4i)L
где jl - весовой коэффициент функции качества. Эта модель удобна тем, что область значений функции каче- ства всегда определяется интервалом (О,l);
Блок вьгчисления функции качества 3 на основании ошибки идентификации 6(t) определяет количественную меру уклонения движения модели от изучаемого объекта. На выходе блока 3 снимаются сигналы, пропорци- Ъ Йальные значениям функции качества (к блоку 4 поступает непосредствей- но значение i , а к блоку 7 значение ) г Де i - экстремальное значение качества; w consi O). .
Исполнительные механизмы 6 (интег раторы) предназначены для изменения значений коэффихщентов модели объекта идентификации.
5
10 15
0 5
0
5
Устройство работает cлeдyюaц м образом.
При отсутствии сигнала рассогла- сования между выходньми сигналами объекта идентификации и модели на выходе блока вычисления функг ии ка- чества 3 снимается сигнал, пропорциональный экстремальному значению функции качества (для определенности рассмотрим, экстремум типа максимум). Это равносильно отсутствию текущей информации о поведении объекта идентификации. Сигнал с блока вычисления функции качества 3 поступает на вход управляемого по частоте тактового генератора 4, который формирует тактовые моменты, повторяющиеся через равные промежутки времени. в которых закодировано экстремальное значение функции качества. В момент возникновения сигнала рассогласования между входными сигналами объекта идентификации и модели на вход управляемого по частоте тактового генератора 4 поступают сигналы отличные по величине от экстремального значения функции качества. На выходе тактового генератора формируются сигналы,длительности которьк зависят от положения системы относительно экстремума функции качества. При движении системы в направлении экстремума частота поисковых сигналов возрастает, достигая максимального значения в области экстремума. При удалении системы от экстремзта частота поисковых сигналов уменьшается. Таким образом, в процессе поиска обеспечивается формирование таких сигналов настройки коэффициентов модели, которые организовьшают движение, системы к экстремуму функции качества. Кроме того, выделяется постоянная составляющая поисковьк сигналов, которая является оценкой градиента функции качества по пара- метра.м. Отмеченная задача решается следующим образом. Сигнал рассогласования между выходами объекта . идентификации и модели, который несет информацию о величине несоответствия варьируемых коэффициентов
модели и параметров объекта, закодированный в изменении частоты управляемого по частоте тактового генератора 4, поступает на вход блока формирования случайных реверсивных воздействий 5. Работа блока
I
5 протекает в, двух режимах. В первом сигналы с управляемого по частоте тактового генератора поступают на вход запуска блока 5, который на своих выходах вырабатьтает постоянные по абсолютной величине и случайные по знаку поисковые управления Таким образом, в момент переключения управляемого по частоте тактового генератора коэффициенты модели объекта управления изменяются согласно выбранным блоком 5 направлениям в пространстве идентифицируемых параметро Это новое случайное состояние систем имеет место до последующего переключения управляемого по частоте тактового генератора. На данном интервале времени между моментами переключения i ., исполнительные механизмы изменяют коэффициенты модели , в соответствующем направлении. Во втором режиме работы блока 5 осуществляется изменение знака поисковых управлений на противоположньш, т.е. происходит реверс знака поисковых управлений. В течение этого интервала времени исполнительные механизмы будут изменять значения настраиваемых коэффициентов в новом направлении. В дальнейшем происходит чередование режимов работы блока 5. Соотношение длительности случайных и реверсивных интервалов определяет направление движения системы по отношению к экстремуму функции качества. Целенаправленность движения к экстремуму обеспечивается повьшением частоты поисковик управлений при благоприятных смещениях.
Ускоренное описание раскрывает механизм настройки коэффициентов модели объекта идентификации, работу которого выполняет контур анализа параметров.
Работа контура формирования входных воздействий происходит следующим образом. На вход управляемого по частоте генератора 7 поступают сигналы с блока вычисления функции каче- ;ства 3, которые несут информацию о состоянии объекта 2 и модели 2 .При движении системы в область экстремума частота генератора возрастает,при движении системы в сторону от экстремума - уменьшается. Таким образом произво5086 .S
дится целенаправленная активизация системы по входу.
Положительньш эффект устройства заключается в следующем. Использование в идентификаторе управляемого по частоте генератора на входе системы и управляемого по частоте тактового генератора с блоком формирования случайных реверсивных воздействий в
0 канале настройки параметров позволяет реализовать непрерьшно-дискретный характер поиска и существенно расширить область применения идентификатора по сравнению с устройством идентификации
5 методом самонастраивающейся модели с использованием многоканального статистического оптимизатора. Дискретный характер поиска проявляется в моменты срабатьшания управляемого
Q по частоте тактового генератора,
когда блок 5 вырабатьшает случайные по знаку поисковые управления или же производит их реверс. В то же время непрерьюный характер поиска
5 проявляется в интервалах между сра- батьтанием управляемого по частоте тактового генератора. При этом повышаются быстродействие и точность процесса идентификации.
0
Формула изобретения
Идентификатор многомерных объектов, содержащий модель объекта,интеграторы по количеству настраиваемых параметров, соединенные выходами с параметрическими входами модели, и блок вычисления функции качества, отличающийся тем, что, с целью увеличения быстродействия и точности процесса идентификации, он содержит управляемый по частоте тактовый генератор и блок формирования случайных реверсивных воздействий, первый выход блока вычисления функции качества соединен с входом управляемого.по частоте тактового генератора, который через блок формирования случайных реверсивных воздействий подключен к вхо-;
0 дам интеграторов, второй выход блока вычисления функции качества соединен с входом управляемого по частоте генератора входных воздействий, выход которого подключен к
5 входам объекта и модели.
5
0
фиг, 7


| название | год | авторы | номер документа |
|---|---|---|---|
| Идентификатор нестационарных объектов | 1977 |
|
SU746413A1 |
| СИСТЕМА ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ л-МЕРНЫХ ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU391535A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Идентификатор функций многих переменных | 1981 |
|
SU993204A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Многоканальный автоматический оптимизатор | 1980 |
|
SU949634A1 |
| Система электремального управления | 1976 |
|
SU651314A1 |
| Многоканальная цифровая система управления виброиспытательной установкой | 1978 |
|
SU943642A1 |

Изобретение относится к области автоматики и может найти применение при решении задач идентификации не полностью наблюдаемых многопараметрических объектов. Цель изобретения - увеличение быстродействия и точности при проведении идентификации парамет- тров многомерных не полностью наблюг- даемых объектов. Идентификатор содержит объект идентификации, модель объекта идентификации, блок вычисления функции качества, управляемый по частоте тактовый генератор, блок формирования случайньгх реверсивных воздействий, интеграторы и управляемый по частоте генератор. Цель достигается введением блока формирования случайных реверсивных воздействий и управляемого по частоте генератора. 5 ил. (П
Вход
фиг. 2
Вход,
SJ
-OfВых(
Pw«. 3
D2
U4 -JI
«t
«SI «41
V:/ Ч
/
S2
a
«M CJ
/
4
ij.r:-TiJ
| Эйкхофф П | |||
| Основы индентифика- ции систем управления, М.: Мир, 1975, с.684 | |||
| Растригин Л.А., Сытенко Л.В | |||
| Многоканальные статистические оптимизаторы | |||
| М.: Энергия, 1973, с.125. |
